


1. 서 론
아프가니스탄 전쟁에서의 무인체계들의 급격한 사용 증가 이후 무인수상정, 무인잠수정 및 무인항공기를 포함하는 해양무인체계들이 해양작전 환경을 변화시키는 하나의 큰 돌파구로서 사용되고 있다. 서해북방한계선(Northern limit line, NLL) 해역과 같이 적의 수상 및 수중세력이 밀집되어 있는 위험해역에서는 아군의 해상전력을 적절하게 이격된 안전거리에서 수중로봇과 같은 해양무인체계를 진수시켜 초계 및 감시⋅정찰 임무를 수행하게 함은 보다 고가치의 유인플랫폼과 인력을 보호하면서 아군 전력을 전진 배치하는 효과가 있다. 특히 수중에서의 해양작전은 인간의 활동에 많은 제약이 가해지는 영역이기 때문에 무인잠수정(Unmaned underwater vehicles, UUVs)과 같은 수중로봇이 기존의 유인체계인 수상함과 잠수함의 작전능력을 확장하고 전투력을 증대시키는 유용한 도구가 될 수 있다. 즉, 잠수함에의 수중로봇의 탑재 운용은 적으로부터 아군의 잠수함 전력의 탐지 위험을 줄이면서 적 거부해역으로부터의 우군 작전영역을 확대함으로써 수중작전능력의 전술적, 전략적 가치를 높일 수 있는 운용방안이다(Bladin et al, 2013).
하지만 수중로봇의 해양작전에의 유용성에도 불구하고, 함정 또는 잠수함에서의 수중로봇 운용비용과 인적소요 시간의 상당부분을 이를 진수하고 회수하는데 소요되기 때문에 유인체계의 전력극대화를 위한 장애요소중의 하나이다. 특히 높은 해상상태의 파랑 중에 운항하는 수상모선에서의 진수와 회수 뿐 아니라 잠수함 내부로의 회수는 대단히 위험하면서도 기술적 정교함이 요구되는 작업이기 때문에 안전하고 효율적인 진⋅회수기술은 수중로봇 운용기술의 핵심기술 중의 하나이다. 따라서 유인체계에서의 수중로봇의 운용 활용도를 제고하기 위해서는 수상 및 수중에서의 운용편이성과 유인체계와의 H/W적 S/W적 융합이 필수적이며, 여기에는 많은 부분 수중로봇의 진⋅회수 기술과 관련되어 있다(Eric, 2012) 우리 해군에서도 수중로봇의 해양작전에의 유효성을 인식하고 이를 적용하려는 노력이 이루어지고 있음에도 불구하고 이들의 잠재적 운용능력들을 효과적이고 효율적인 발휘에 한계를 노출하고 있다. 이는 기존의 유인체계 전력 뿐 아니라 건조 계획되어 있는 함정 및 잠수함의 대부분이 수중로봇의 운용을 고려하지 않은 선체 구조이기 때문이기도 하다. 또한 방위사업청 및 국방과학연구소를 통해 여러 형태의 수중로봇들이 연구 개발되고 있으나 이의 효율적인 유인플랫폼에의 적용에 대한 운용기술, 특히 진⋅회수기술에 대한 연구는 상대적으로 저조한 것도 한 원인이라 할 수 있다.
따라서 본 기술보고서는 여러 가지 수중로봇의 유인플랫폼에서의 효율적 운용을 위한 주요 기술요소 중의 하나인 진수 및 회수체계(Launch and recovery system, LARS)를 UUV를 중심으로 검토하고, 우리해군의 수상함 및 잠수함에의 적용방안을 검토⋅제시하였다. UUV는 원격무인잠수정(Remotely operated vehicle, ROV)과 자율무인잠수정(Autonomous underwater vehicle, AUV)로 구분할 수 있는데, 여기에서는 AUV에 초점을 맞추었다. 아울러 본 기술보고서는 어느 특정 임무 혹은 특정 목적에 적합한 LARS의 검토이기보다는 수중로봇의 잠재적인 다양한 임무에 적합한 LARS 옵션들을 검토하였으며, 국내에서 개발되었거나, 개발되고 있는 무인체계들의 전술적 잠재능력을 충분히 발휘할 수 있는 유인플랫폼 혹은 보다 대형의 무인플랫폼에서의 진⋅회수기술을 중심으로 수중로봇의 지원체계와 운용개념을 고려하였다. 단기적으로는 기존의 유인플랫폼의 개조없이 임무 목적에 따라 수중로봇을 탑재 운용할 수 있는 방안을 제시하고, 장기적으로는 수중로봇을 운용하는 함정 및 잠수함의 크기와 형식에 관계없이 유인플랫폼의 전술작전 능력을 확대하는 방안을 제시하였다.
2. 수상함에서의 진수 및 회수 체계
2.1 램프(Ramp)와 다빗(Davit)
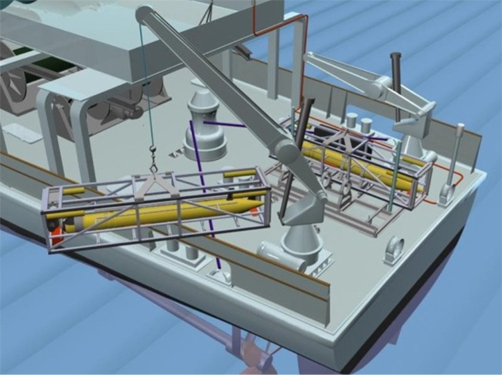
수상함에서의 진⋅회수체계에는 램프, 크레인, 중간포획장비 혹은 도킹장비 그리고 사출장치로 구분할 수 있다(Hanyok and Smith, 2010). 램프는 통상 선미램프(Stern ramp)와 경사로(Spillways), 웰갑판(Well deck) 및 문풀(Moon pool) 등과 이들을 선체설계에 통합시킨 LARS를 포함한다. 비교적 대형의 UUV는 7°~12°의 선미램프 경사로를 통해 진수하는데, 통상 선미 게이트를 개방하여 램프를 내리고 자중에 의해 경사로를 따라 슬라이드하여 수상으로 진수하는 방식이다(Fig. 1). UUV의 회수는 걸쇠 시스템(Latching system)과 견인줄(Tow line)을 사용하는데, 진수와는 반대로 체계와 모선을 정렬시켜 UUV가 램프로 올라타고 훅크에 걸어 끌어 올리는 방식이 사용된다. 선미램프는 선체내부에 설치하는 경우와 선체 외부로의 경사로를 확장시키는 형식이 있다. 선미램프 방식은 비교적 신속한 진⋅회수가 가능하며, 이에 필요한 갑판 인력 소요를 줄일 수 있는 장점이 있다(Sheinberg et al., 2003). 최근의 전투함 설계에는 무인체계의 운용을 고려하여 선미램프를 선체에 통합시키는 것이 일반적인 추세이다.
Fig. 1
Seahorse AUV launch from surface ship (upper) and land (lower) by extended sliding ramp (Pensylvania State University, 2006)

다빗은 해상작전용 보트의 진⋅회수를 위해 대부분의 수상함에 설치되어 있다. 다빗 시스템은 크레인에 비하여 갑판 공간을 비교적 적게 차지하는 장점이 있지만 해상상태에 따라 진⋅회수에 상당한 제한이 따른다. 다빗은 A-프레임, C-프레임, 회전다빗 등이 있는데 함정의 공간 배치 적합성과 설치 공간에 따라 적절한 형식을 선택하여 사용된다(Fig. 2). 다빗 시스템에 의한 UUV 회수는 진수보다 어려운 작업으로, 소형의 UUV는 소형보트에 탑승한 1~2명의 승조원에 의해 수동으로 회수한 후 보트자체를 다빗으로 끌어 올리지만, 대부분의 경우에는 해상에 떠 있는 UUV를 걸쇠 시스템에 체결한 다음 견인줄을 사용하여 끌어 올리는 방식이 사용된다. 하지만 이러한 작업은 다이버 혹은 승조원의 지원 없이는 상당히 어려운 작업이다. 따라서 크레인 혹은 다빗에 의한 무인체계의 회수에는 중간포획장비(Intermediate capture system)를 사용하는 것이 안전하고 신속한 회수 방식이라 할 수 있다. 중간포획장비는 수중로봇의 회수과정에서 모선과 UUV의 충돌에 의한 손상과 상대운동을 최소화하여 무인체계의 모선에로의 회수를 용이하게 하기 위한 장비로 케이지(Cage), 슬레드(Sled), 레일, 고치(Cocoon), 회수네트(Nets) 등의 다양한 형태가 사용된다. 케이지와 소형썰매 및 고치 등은 주로 수상함에서의 중간포획장비로 사용되고, 슬레드와 레일 시스템은 육지에서 해상으로 진수하거나 함정에서 움직이는 수상 비클을 진수하거나 회수할 때 사용된다(Fig. 3).

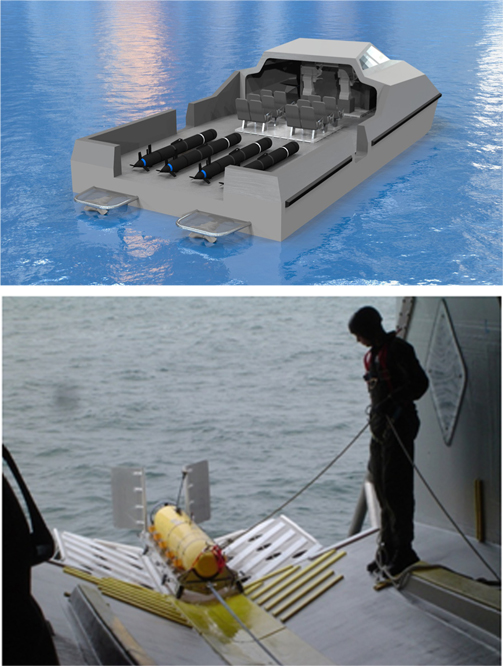
2.2. UUV 수송 및 진⋅회수 무인모선
미 해군은 저속의 UUV를 고속운항이 가능한 무인수상정(Unmaned surface vehicle: USV)에 탑재하여 원거리의 임무해역으로 신속하게 수송하여 진수시키는 RDUST(Remote delivery of unmaned system technology)를 개발하였다(Freeman, 2005; Abrell and Saajban, 2008). RDUST USV는 소형으로 높은 해상상태에서의 운용은 제한이 따른다. 최근에는 USV보다 대형이면서 고속 운항이 가능한 M80 Stiletto함과 같은 특수전용 소형함정을 수중로봇의 수송 및 진⋅회수모선으로 활용하고자 시도하고 있다. M80 Stiletto함은 60kts(111.12km/h)의 고속 항주가 가능한 37톤의 M형 선체의 함정으로 11m급의 USV 혹은 UUV의 탑재가 가능하도록 설계되어 있다. 낮은 갑판의 함정형상과 고속의 항주 능력은 레이더반사면적(Radar cross section, RCS) 감소와 시각관측에 대한 은밀성을 높일 수 있어 적 해역에서의 특수정보작전에 투입할 수 있는 무인체계의 수송 및 진⋅회수모선으로 유용한 선형이다(Fig. 4). 미 DARPA(Defense Advanced Research Project Agency)는 표준화된 발사관 안에 작전임무 따라 적절한 모듈형 UUV를 탑재할 수 있는 UUV 모선 프로젝트인 Hydra 프로젝트를 진행하고 있다. 이는 Hydra를 잠수함 혹은 수송기에 탑재하여 임무해역 근처에 수송한 뒤 진수하여 Hydra가 자율적으로 작전해역으로 은밀 이동한 뒤 UUV를 진수하는 개념이다.
NATO(North Atlantic Treaty Organization)에서도 소형 소수선면쌍동선(Small waterplane area twin hull, SWATH)형 USV를 UUV의 수송 및 진⋅회수모선으로 활용하는 방안을 연구⋅개발하고 있다. UUV 무인수상모선은 4.2톤 크기로 중⋅소형의 UUV를 탑재하여 육상기지로부터 임무해역으로 수송하고, 진수와 회수 뿐 아니라 UUV 동력의 재보급 기지 및 육상기지와 임무명령의 송수신 중계기지 역할을 담당하는 개념이다. 아울러 USV 자체에도 별도의 임무센서를 탑재하여 독자적인 임무를 수행한다. UUV의 진수 및 회수는 인양기(Hoist)와 인양기 벨트를 수중으로 내려, 쌍동선 하부 선체 사이로 수중음향 탐지기 신호에 의해 UUV를 유도하여 정렬시킨 후에 인양기로 끌어올려 회수하는 개념이다(Brizzolara and Chryssostomidis, 2012) 프랑스에서도 무인체계 운용모선으로 대형 USV인 Sterenn Du함을 개발하고 있다. Sterenn Du는 선미램프 방식의 LARS로 대형 UUV의 진⋅회수가 가능한 25톤의 쌍동선 형태로 예인배열소나와 K-ster와 같은 소모성 기뢰소해 UUV를 탑재 운용할 계획으로 알려져 있다. Sterenn Du의 LARS 방식은 선미램프 방식이 사용될 것으로 보인다.

3. 잠수함에서의 진수 및 회수 체계
3.1 잠수함 내부탑재형
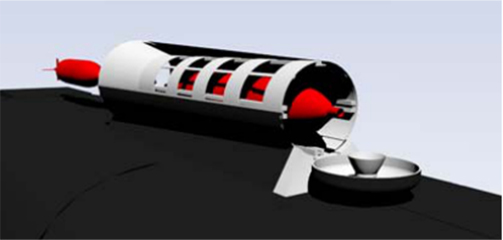
잠수함 내부탑재형은 어뢰발사관 혹은 미사일 발사관에 UUV를 탑재하고, 진⋅회수하는 방식으로 21인치 표준어뢰발사관과 수직미사일 발사관을 활용하는 방법으로 구분할 수 있다(Fig. 6). 표준어뢰발사관에서의 진수는 기존의 어뢰발사 시스템을 사용하거나 UUV 자체 추진력에 의해 진수하는 방식이 사용된다. UUV의 회수는 로봇팔 등의 회수 시스템을 사용하거나 ROV를 회수 보조시스템으로 활용하는 방안들이 연구되고 있다. 표준 어뢰발사관을 활용한 진⋅회수는 기존의 잠수함 어뢰 발사관을 사용하기 때문에 UUV 운용에 따른 잠수함 모선에의 영향을 최소화할 수 있으며, UUV 운용을 위한 잠수함의 개조가 용이한 장점이 있다. 또한 외부에서 UUV의 탑재여부를 알 수 없어 은밀작전에 적합하며, 잠수함 내부에서 UUV의 정비, 동력충전 및 임무 페이로드 교체 등의 작업을 수행할 수 있다. 그러나 제한된 어뢰관 혹은 미사일 발사관 직경에 부합되는 어뢰형 UUV만 운용 가능한 단점이 있다.

3.2 잠수함 외부탑재형
잠수함 외부탑재형은 잠수함 선체 외부에 UUV 탑재 행거를 부착하여 편승시키는 방식으로 건식행거와 습식행거로 구분할 수 있다. 건식행거는 잠수함 선체와 기밀통로로 연결된 밀폐식 격납모듈로 UUV 운용과 정비를 위한 다이버들과 비클이 출입할 수 있다(Fig. 7). UUV의 진⋅회수는 일반적으로 전문 다이버를 활용하는데, 다이버가 행거 내로 들어가 해수를 유입시킨 다음 후방의 도어를 개방시킨 후 윈치를 사용하여 행거 밖으로 진수 시킨다. 회수는 진수와 역의 절차를 수행한다. 건식행거는 소형으로부터 데크쉘터와 같은 대형 행거까지 제작할 있어 다양한 크기와 형태의 UUV를 사용할 수 있다. 또한 잠수함 모선의 압력선체와 건식행거 간 정비요원 및 운용요원이 기밀통로를 통해 이동할 수 있도록 설계할 수 있어 UUV 회수 후 행거 내에서 정비와 동력충전, 페이로드 교체 등의 작업을 수행할 있다. 아울러 특수작전 임무 다이버 등 여타의 수중전력을 진수하는데도 활용할 수 있다. 하지만 상대적으로 소형의 잠수함에는 설치가 곤란하고, 복잡한 드레인 및 수배출 시스템, 공기 및 압력관리 시스템이 요구되고, 잠수함 이동 중에는 UUV의 회수가 어려운 단점이 있다. 따라서 건식행거 방식은 구형 잠수함의 개조 및 비교적 대형의 신조 계획 잠수함에 적용할 수 있는 방식이다.

습식행거는 해수가 유통되는 개방형 행거로 통상 잠수함 모선의 핀 후방에 위치시켜 UUV의 보관과 진⋅회수 관련 장비를 탑재하는 방식이다. UUV는 행거 내에 격납시킬 수 있으며, 건식행거와 유사한 방식으로 진⋅회수할 수 있다. UUV LARS는 다이버 지원이 없는 자동시스템 혹은 다이버의 지원이 요구되는 단순시스템에 이르기까지 다양한 방식으로 구성할 수 있다. 습식행거 방식은 운용할 UUV의 크기와 맞추어 잠수함 주위의 적절한 위치에 행거 혹은 울타리를 부착하는 방식도 고려되고 있다(Fig. 8). 이는 잠수함 모선이 이동하는 동안 UUV를 제한적으로 보호하는 역할을 하며, UUV의 자체 추진력으로 행거 전방 출입구로 유영하여 나가고, 후방으로 유영해 들어는 진⋅회수 방식이다(Hardy and Barlow, 2008). 습식행거는 건식행거에 비해 경량이며 기존 잠수함에서도 신속하게 개조하여 적용할 수 있는 장점이 있다. 그러나 잠수함 모선의 주압력 선체와 행거 간 정비작업을 위한 인력 투입이 불가능하고, UUV 진⋅회수 시스템이 복잡하여 자동화된 LARS가 요구되는 방식이다.
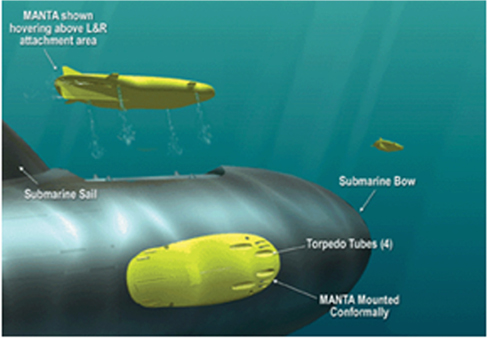
3.3 잠수함 선체 착탈식
잠수함 선체 착탈식은 잠수함 측면 혹은 하부와 UUV 표면을 서로 흡착 및 분리하여 진⋅회수하는 방식으로, UUV가 잠수함 모선의 무장발사 역할을 하는 전투무인잠수정의 진⋅회수 시스템으로 제안된 방식이다(Fig. 9). 어뢰 혹은 미사일 등의 무장은 전투용 UUV에 탑재하고 잠수함 모선은 UUV의 수송지원함의 역할을 수행하므로 수중 UUV 항공모함의 개념이다(Gish, 2004). UUV 탑재위치는 잠수함의 선체 외부이지만 잠수함의 압력선체 설계는 UUV를 탑재할 수 있는 공간을 조성하고 UUV를 탑재한 후 덮개를 하기 때문에 잠수함의 항해에 지장을 주거나 소음을 증대시키지 않는다. 또한 UUV의 외형과 크기 등의 제한으로부터 자유롭기 때문에 소형급으로부터 대형급에 이르기까지 수용할 수 있도록 개발하면 UUV 운용상 이점을 증대시킬 수 있다. 즉, UUV 형상설계상의 융통성이 커지므로 고성능화가 가능해지고 은밀성을 증가시킬 수 있는 외형을 가질 수 있다. 또한 잠수함 모선 주변 외부에 보다 많은 수의 UUV를 탑재하여 진수 가능하며, 잠수함 모선의 형태 및 크기에 따라서는 잠수함의 수중 작전반경과 임무능력 획기적으로 확대시킬 수 있는 능력을 보유할 수 있다. 이 방식은 대규모의 UUV 진수 및 은밀작전을 가능하게 할 수 있으나 고도의 기술을 갖춘 진⋅회수 시스템의 자동 및 자율화가 요구되어 상당기간 실현이 어려운 방식이다.
3.4 수중 도킹 및 회수체계
수중에서 잠수함 내부로의 UUV 회수는 수중상태, 잠수함과 UUV의 운용템포, UUV의 자율도, 잠수함 및 UUV의 운동예측 그리고 UUV의 기동과 제어능력의 강건성 등 대단히 정교한 기술이 요구된다. 초기에는 다이버가 UUV를 포획하여 견인줄에 연결한 다음 잠수함 내부로 인입시키는 방식이 사용되었다. 현재에는 능동 자율기술이 뒷받침된 깔때기형 수중도킹시스템, 수직폴 회수, 로봇팔 회수 그리고 SUBROV 회수시스템 등의 UUV 도킹 및 회수시스템 기술이 개발되어 있다.
깔때기형 도킹시스템은 UUV 수중회수에 가장 일반적으로 시도된 시스템으로 UUV를 적재위치로 가이드하는 방식이다(Fig. 10). 통상 UUV 전방에 설치된 USBL를 사용하여 도킹 스테이션에 설치된 트랜스듀서에서 전송된 음향을 수신하여 도킹 콘 근처로 접근하도록 유도한다(Stokey et al., 1997) 도킹 성공률을 높이기 위해 도킹 타깃을 영상으로 식별할 수 있는 거리까지는 음향 호밍으로 유도하고 도킹 최종단계에서는 영상 기반의 도킹 타깃을 확인하는 복합호밍 방식도 시도되고 있다(Evans et al., 2003; Maire et al, 2009) 깔때형 도킹시스템은 비교적 간단하면서 저가로 제작할 수 있는 장점이 있지만, 장치가 상대적으로 크고, 최적 환경이 아닌 조건에서의 도킹 성공률은 아직 입증되지 않고 있다. 최근에는 캐나다의 DRDC(Defense Research and Development Canada)에서 도킹 성공률을 높이기 위한 능동자동도킹회수장치를 개발하고 있다(Currie et al., 2014]). 국내에서는 선박해양플랜트연구소(Maritime Ocean Engineering Research Institute, MOERI)의 Isimi 개발 당시 광원을 활용한 수중비전에 의한 근거리 유도 도킹방식의 도킹콘을 개발한 바 있다. 그러나 도킹콘 방식은 어뢰발사관이 전방에 위치하고 있는 경우 UUV가 잠수함 정면으로 ±1m 이내의 정확도로 접근해야 하는 등 실제로 적용하기 어려운 기술이다(Jun et al., 2009).

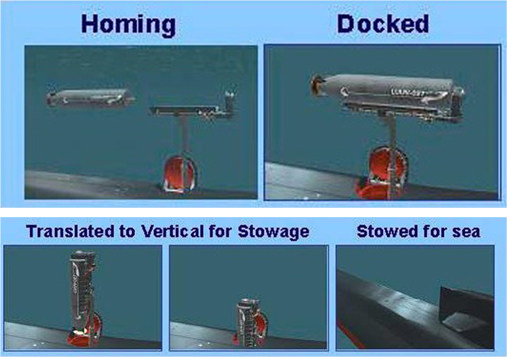
수직폴 회수시스템은 Woods Hole과 Florida Atlantic 대학에서 개발한 회수 방식으로 UUV가 스팅어(Stinger) 혹은 수직폴 (Vertical pole)로 슬라이딩해 들어와 가위모양의 구조물로 포획하여 회수하는 방식이다. 이 방식은 UUV가 어느 방향에서든지 접근할 수 있으므로 조류 등 외부 흐름의 교란이 있는 상황에서 도킹장치에 정렬시켜야 되는 문제를 피할 수 있다(Singh et al, 2001) 수직폴 회수방식을 잠수함 탑재 회수시스템에 적용한 것이 ULRM(Universal launch and recovery module)으로 미 해군의 오하이오급 잠수함을 유도미사일 원자력잠수함으로 개조하는 프로젝트의 일환으로 개발된 UUV 회수 모듈이다(Fig. 11). ULRM은 잠수함의 미사일 발사관 공간을 활용하여 UUV 보관 및 진수에 사용하기 때문에 잠수함 형상 변경없이 운용비용을 대폭 감소시킬 수 있을 것으로 기대하고 있다.
로봇팔 회수시스템은 어뢰관 장착 UUV 회수용 로봇팔로 잠수함 모선에 근접한 UUV를 포획하여 근처의 어뢰관 안으로 밀어 넣는 방식이다. 로봇팔 회수시스템은 Boeing의 장거리기뢰탐색시스템(Long-term mine reconnaissance system, LMRS) AN/BLQ-11의 일부로 개발한 것으로 어뢰발사관에서 진수한 UUV를 임무 수행 후 호밍 및 도킹 소나로 잠수함 모선근처로 유도한 뒤 회수 로봇팔을 최대로 전개시켜 접근하는 UUV를 포획하여 어뢰발사관 내로 회수한다. 그러나 회수시 사용하는 로봇팔은 UUV를 어뢰관에 정확하게 조준시킬 필요가 있고, 다른 회수 시스템에 비하여 매우 고가이며, 어뢰발사관에서 사용하기에는 중량이 2,000kg으로 무거운 것이다 단점이다. 더욱이 어뢰발사관이 잠수함 측면에 있는 경우에 적합하게 설계되어 있어 잠수함 정면에 어뢰관이 있는 재래식 잠수함에의 적용은 어렵다(Fig. 12; White, 2007)

SUBROV 회수시스템은 스웨덴 Saab사가 개발한 Sea Owl SUBROV를 사용한 UUV 회수시스템으로 어뢰발사관에서 진수된 UUV 회수의 보조 역할을 수행한다. SUBROV 회수시스템은 콘솔에 영상 및 소나 이미지를 전시하여 운용자가 ROV를 제어하여 다이버 지원 없이 UUV와 도킹 및 회수한다. 즉 진입하는 UUV를 운용자의 조종에 의해 ROV 자체를 조종하여 정렬시킨 후 그립 툴을 사용하여 도킹한 다음 어뢰관 내로 회수하는 방식이다.(Fig. 13) 국내에서도 RF 센서와 비전시스템에 의한 ROV 회수 시스템 개발이 시도된 바 있다. 이 방식은 잠수함의 개조 없이 사용할 수 있는 장점이 있으나, 회수과정에서 운용자가 필요한 반-자동 회수 시스템이다(Kim and Lee, 2011).

4. 진⋅회수체계 개발 및 운용방안
4.1 수상함에서의 진⋅회수
미 해군의 연안전투함과 같이 선진국은 함정의 설계단계에서부터 수중로봇을 최소인원으로 신속하게 진⋅회수 할 수 있는 LARS가 설계되어 있다. 하지만 국내의 전투함들은 수중로봇 운용을 전제로 설계된 함정은 거의 없기 때문에 전용 LARS 또한 고려되지 않았다. 다만 ROV를 운용하는 기뢰탐색함과 구조함에 A-프레임 형태의 LARS 체계가 있을 뿐이다. 아울러 기존 함정의 탑재 공간은 이미 여러 가지 기존 시스템들이 차지하고 있기 때문에 수중로봇을 운용하기 위하여 많은 변화를 가하는 일은 현실적으로 어려운 일이다. 따라서 단기적으로는 기존 전투함 등의 수상함 플랫폼을 개조하기 보다는 진⋅회수장치를 보완함으로써 합리적인 운용방안을 모색하는 것이 현명한 일이다. 이상적으로는 기존 함정운용에 영향을 주지 않으면서 통합할 수 있는 있도록 최대한의 높은 신뢰성과 낮은 정비요건을 갖는 LARS의 보완이 요구된다. 아울러 수중로봇의 신속하고 안전한 진⋅회수를 위하여 기존의 수동식 LARS를 반자율 LARS로 개발하여 운용하는 것이 바람직하다. 이는 수중로봇 운용에 따른 기존 수상함 전력에의 영향을 최소화 하면서 관련 기술이 성숙할 때까지 수중로봇을 점진적으로 도입하는데 유리할 것으로 판단된다.
수상함으로부터의 수중로봇의 진⋅회수는 기존의 소형 보트의 진⋅회수와 같이 새로운 개념은 아니지만 회수방법과 장비의 개발은 새로운 도전이 되고 있는 기술 분야이다. 특히 해상에서의 진⋅회수는 대략 해상상태 5~7정도가 운용한계인 만큼 안전과 신속한 운용을 위해 자동화, 자율화되는 추세이다. 자동화 LARS 프로세스는 자동호밍, 정대, 부착 및 모선에의 탑재단계로 구분할 수 있다. 각각의 진⋅회수 단계별 수행을 지원하기 위한 기술개발 요소들은 수중로봇 탑재 공통명령 및 제어의 개발, 자동화 LARS에 필요정보를 제공하는 센서와 제어시스템의 통합개발과 수중로봇과 함정 시스템에의 영향을 최소화하면서 적절하게 탑재제어를 제공하는 강인한 결속 및 부착 메커니즘의 개발이 요구된다. 기존 함정의 선체 개조를 줄일 수 있는 대안으로 수중로봇 전용 컨테이너형 LARS의 활용을 고려할 수 있다. 컨테이너형 LARS는 표준 컨테이너를 활용하여 수중로봇을 보관하고, 수송하며, 진⋅회수하는 개념으로 LARS 유닛을 모듈화 하여 기존 함정의 구조변경 없이 임무 수행시만 탑재할 수 있다. 이는 수중로봇의 수송 중 체계안전을 도모할 수 있고 필요한 경우에만 수중로봇 전용 컨테이너를 탑재함으로써 운용비용을 절감할 수 있어 전투함정에 수중로봇의 운용을 보다 확대할 수 있는 방안이다(Rauch et al, 2008).
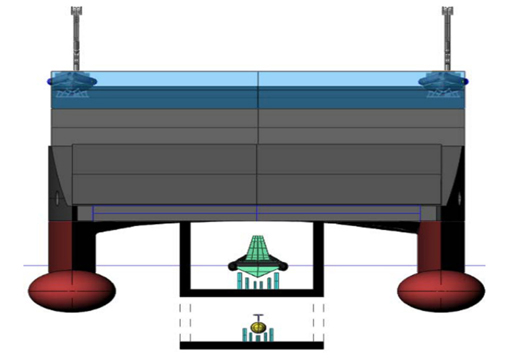
장기적으로는 호위함 혹은 초계함과 같은 UUV 임무수행에 적합한 중⋅소형의 전투함 설계에 수중로봇의 운용을 위한 진⋅회수체계가 고려되어야 한다. 수중로봇 등의 신기술에 의한 체계들을 통합할 때 함정 개조로 발생할 수 있는 추가 비용을 절감하기 위해서는 기술발전과 필요에 따라 신속하고 효과적으로 조정할 수 있는 모듈화 설계와 무인체계용 임무격실의 확보가 요구된다(Kimbler, 2012). 또한 수중로봇을 비롯한 해양무인체계를 활용한 다양한 형태의 해양작전에의 활용을 위해서는 미 해군의 연안정찰선(Littoral reconnaissance ship, LRS)과 같은 무인체계전용 수송 및 진⋅회수체계 전용 함정을 건조하여 다양한 작전에의 운용을 고려할 필요가 있다. LRS는 약 1,000톤급의 소수선면쌍동선으로 중간지원기지로부터 약 1,000NM (1,852km) 떨어진 해상에서 수중, 수상, 공중 무인체계들의 진⋅회수, 연료재보급 혹은 재충전, 임무감독 및 정비 등의 무인체계 운용을 위해 특화된 모선이다. LRS에서의 무인체계 진⋅회수는 갠트리 크레인을 사용하여 USV 크래들 혹은 UUV 랙크를 수면상으로 내리고 올려 진⋅회수하는 개념이다(Fig. 14).
4.2 잠수함에서의 진⋅회수
잠수함에서의 UUV 운용 역시 많은 이점에도 불구하고 이를 위하여 기존 플랫폼에 변화를 가하는 일은 수상함보다도 어려운 일이다. 따라서 수상함의 경우와 마찬가지로 기존 플랫폼에 영향을 주지 않으면서 통합할 수 있는 시스템을 고려하여한다. 이를 위해서는 잠수함 모선과 UUV의 임무목표와 목적 즉, 운용개념을 먼저 정립한 후에 적절한 LARS 방식을 검토하여야 한다. 즉, 잠수함 모선과 UUV의 전술적 능력의 통합을 극대화하기 위해서는 잠수함 모선의 안전 뿐 아니라 UUV와의 전술적 요구와 능력간의 균형의 조화를 이룰 수 있어야 한다. 여기에는 잠수함 모선이 UUV 임무 지원에 역할, 즉 잠수함 운용간의 UUV 진⋅회수 주체 및 방식, UUV 탑재와 동력충전 방식 등의 운용개념들이 정립되어야 한다. 따라서 단기적으로는 지휘통제 체계 등을 일부 개조하고 진⋅회수장치를 보완하여 운용하는 것이 현실적이다. 기존 잠수함 전력을 고려하면 21인치 표준어뢰관에서의 진⋅회수가 가장 현실적이나 소형의 UUV만이 운용 가능한 단점이 있다. 따라서 향후 건조되는 잠수함에는 보다 대형의 UUV를 활용할 수 있도록 압력선체 외부의 상부데크에 행거를 설치하여 진⋅회수하는 방안을 고려하여야 한다. 이는 특수목적 임무 수행시에만 행거를 설치 운용하는 방법으로 선체개조에 따른 시간과 비용을 절감할 수 있는 방안이다. UUV를 잠수함의 상부데크 행거내로 회수하기 위해서는 행거내부에 자동도킹 할 수 있는 시스템이 필요하다. 이를 위해서 높은 신뢰도를 갖는 정밀한 호밍장치가 행거 뿐 아니라 UUV 자체에도 탑재되어야 한다. 하지만 잠수함에서의 운용시 UUV의 진⋅회수 시스템 운용으로 인한 소음발생 등의 기술적 문제를 포함하여 잠수함과의 도킹 과정에서의 음향신호 노출 등으로 인한 모선의 위치가 노출될 위험성을 개조설계 단계에서 충분히 고려하여야 한다(Benjamin et al., 2011).
장기적으로 잠수함에서의 UUV 운용개념별로 전력지수를 극대화 할 수 있는 방향으로 UUV의 진⋅회수 개념을 병행하여 개발하여야 한다. 잠수함에서의 UUV 진⋅회수는 로봇팔을 이용한 LMRS 회수방식과 SUBROV를 이용한 Saab의 회수방식 모두 실해역 실험에서는 만족스러운 결과를 얻지 못하여 실전 운용에는 아직 적합하지 않기 때문에 회수 성공률을 제고할 수 있는 보다 현실적 방법이 모색되어야 한다. 즉, 능동자율 LARS 도킹 장치의 개발은 잠수함에서의 UUV 운용 가능성을 발전시키는 매우 긴요한 기술이다. 그러나 현재의 자율도킹 시스템들은 UUV를 실전에 투입 위험을 감수할 만큼의 도킹 성공률에는 미치지 못하고 있다. 예를 들어 Remus 100 AUV의 음향호밍에 의한 직경 1m의 고정 깔때기모양 도크에의 도킹 성공률은 62%~91%, 전자기호밍의 경우는 63%가 보고되어 있다(Freezor et al., 2001). 이와 같이 도킹 성공률을 제고할 수 있는 고정밀 수중항법과 유도제어 등의 기술발전이 잠수함에서의 UUV 운용의 핵심 기술이다.
5. 결 론
수중로봇의 전술적 잠재능력을 발휘할 수 있도록 기존의 유인플랫폼과의 연동 운용에 있어서 핵심적인 역할을 하게 될 진수 및 회수체계에 대해 고찰하고 이의 운용방안들을 검토하였다.
수상함의 경우, 단기적으로는 기존의 전투함정에서의 무인체계 운용의 유연성을 극대화하기 위해서는 다양한 형태의 수중로봇을 진수하고 회수할 수 있는 LARS의 개발이 요구된다. 기존의 유인플랫폼의 개조 없이 임무 목적에 따라 무인체계를 탑재 운용할 수 있는 컨테이너형 전용 LARS 시스템을 개발하여 활용하는 것도 경제적인 운용방안이다. 장기적으로는 무인체계를 운용하는 모선의 크기와 형식에 관계없이 전술작전 능력을 확대하는 방안으로 무인체계 전용 LARS 시스템을 탑재한 고속의 유인 혹은 무인함정의 개발⋅운용이 요구된다. 무인체계 전용 LARS 함정은 유인 혹은 무인으로 병용할 수 있는 크기가 적합할 것으로 생각되며, 이의 효율적인 운용을 위해서는 임무장비의 자율 진⋅회수 기술의 개발이 필요하다.
잠수함에서의 UUV LARS의 핵심목표는 잠수함 모선과 UUV의 전술적, 전략적 가치를 극대화 할 수 있는 LARS를 식별하고 이를 구현하여야 한다. 이를 위해서는 UUV 기반 임무에 대한 명확한 운용개념을 먼저 정립하고, 이를 구현하기 위한 기술들을 식별하며, 식별된 UUV에 특화된 LARS의 개발이 요구된다. 가까운 장래에 UUV의 전술적 가치를 극대화 할 수 있도록 잠수함 모선과의 통합할 수 있는 맞춤형 혹은 복합형 잠수함 모선 설계에의 반영이 요구된다. 우리 해군의 수중전력을 고려할 때, 소형의 UUV는 잠수함 어뢰발사관을, 그리고 대형의 UUV는 건식 혹은 습식 행거를 잠수함 상부갑판에 설치하여 운용하는 것이 바람직 할 것으로 판단된다.




