1. ьДЬ ыба
ъ│аьЖНьДаьЭА ъ│аьЖН ьШБьЧньЧРьДЬьЭШ ь╣иьИШ эСЬый┤ьаБьЭД ьдДьЭ┤ъ│а ьаАэХньЭД ъ░Р ьЬДэХ┤ ьДаь▓┤ ьдСыЯЙьЭШ ьГБыЛ╣ ы╢Аы╢ДьЭД ыПЩьЬаь▓┤ыаеьЭ┤ыВШ ъ│╡ъ╕░ьХХ ыУ▒ьЬ╝ыбЬ ы╢АьГБьЛЬь╝Ь ьзАьзАэХЬыЛд. ыМАэСЬьаБьЭ╕ ъ│аьЖНьДаэШХьЬ╝ыбЬ эХШыУЬь░иьЭ╕(Hard chine) эЩЬьг╝ьДаьЭ┤ ьЮИьЬ╝ый░ ьДаьаАый┤ьЧРьДЬ ьГЭьД▒ыРШыКФ ьЦСыаеьЬ╝ыбЬ ьдСыЯЙьЭШ ыМАы╢Аы╢ДьЭД ьзАьзАэХШыКФ ы░йьЛЭьЭ┤ыЛд.
эЩЬьг╝ьДа ьг╝ьЬДьЭШ ьЬаыПЩьЭД ыНФ ъ╡мь▓┤ьаБьЬ╝ыбЬ ы│┤ый┤ ъ│аьЖН ьШБьЧньЧРьДЬ ьИШый┤ъ│╝ ьДаьИШы╢АьЭШ ъ╡Рь░иьДа ы╢Аъ╖╝ьЧР ьКдэФДыаИьЭ┤(Spray)ъ░А ы░ЬьГЭэХШый░ ьКдэФДыаИьЭ┤ ы░ЬьГЭ ы╢Аы╢ДьЭД ыФ░ыЭ╝ ьаХь▓┤ьаР(Stagnation point)ьЭ┤ ы╢ДэПмэХШьЧм ыЖТьЭА ьХХыаеьЭД ы░ЫыКФыЛд.
ьДаь▓┤ эСЬый┤ьЭД ыФ░ыЭ╝ эЭРые┤ыКФ ьЬаыПЩьЭА ь░иьЭ╕(Chine)ъ│╝ эК╕ыЮЬьДм(Transom) ьДаьаА ыЭ╝ьЭ╕ьЧРьДЬ ыМАы╢Аы╢Д ы░ХыжмыРШый░ ъ░Б ь░иьЭ╕ъ│╝ эК╕ыЮЬьДм ы╢Аъ╖╝ьЭШ ьХХыаеьЭА ыМАъ╕░ьХХ ьаХыПДыбЬ ъ░РьЖМэХЬыЛд. ьЭ┤ьЩА ъ░ЩьЭ┤ ы│╡ьЮбэХЬ ьЬаыПЩ эШДьГБьЭ┤ ы░ЬьГЭэХШыпАыбЬ эЩЬьг╝ьДаьЭА ьДаэШХьЧР ыФ░ыЭ╝ ьЬаь▓┤ьД▒ыКеьЭ┤ эК╣эЮИ ып╝ъ░РэХШъ▓М ы│АэЩФэХЬыЛд. эХЬэО╕ эММыЮС ьдСьЧРьДЬ ъ│аьЖН ьЪ┤эХнэХа ъ▓╜ьЪ░ эММыЮС эХШьдСьЧР ьЭШэХ┤ ьЪ┤ыПЩ ьзДэПньЭ┤ ь╗дьзАъ╕░ ьЙ╜ыЛд. ыФ░ыЭ╝ьДЬ эЩЬьг╝ьДа ьДдъ│Д ьЛЬ ыМАьГБьДаьЭШ ьЬаь▓┤ьД▒ыКеьЭД ьДдъ│Д ъ│╝ьаХьЧР ьЮШ ы░ШьШБэХШьЧм ыкйэСЬ ьВмьЦСьЧР ы╢АэХйэХШыКФ ьДаэШХьЭД ъ░Ьы░ЬэХШьЧмьХ╝ эХЬыЛд.
ы│╕ ьЧ░ъ╡мьЧРьДЬ ыМАьГБьЬ╝ыбЬ эХШыКФ эБмыгиьжИ ыаИьаАы│┤эК╕ыКФ эХШыУЬь░иьЭ╕ эЩЬьг╝ьДаэШХьЭ┤ыВШ, ыаИьаАьЪй ьДаы░ХьЭ┤ъ╕░ ыХМым╕ьЧР ьК╣ьДа ьЛЬ ьХИыЭ╜эХиьЭ┤ ьЪФъ╡мыРЬыЛд. ьЭ┤ые╝ ызМьб▒эХШъ╕░ ьЬДэХ┤ эК╣эЮИ эММыЮС ьдС ьЪ░ьИШэХЬ ьЪ┤ыПЩьД▒ыКе эЩХы│┤ъ░А эХДьЪФэХШыЛд. ьДдъ│Д ъ│╝ьаХьЧРьДЬ ыМАьГБьДаьЭШ ьЪ┤ыПЩьД▒ыКе ьШИь╕бьЭД ьЬДэХШьЧм ыкиэШХьЛЬэЧШьЭ┤ыВШ ьЭ┤ыбаъ│ДьВ░ ыУ▒ьЭШ ъ╕░ы▓ХьЭД эЩЬьЪйэХа ьИШ ьЮИыЛд. ы│╕ ьЧ░ъ╡мьЧРьДЬыКФ ыСР ы░йы▓ХьЭД ыкиыСР эЩЬьЪйэХШьЧм ьДдъ│Д ьДаэШХьЭШ ьЪ┤ыПЩьД▒ыКеьЭД ъ▓АэЖаэХШъ│а, эК╣эЮИ ьЭ┤ыбаъ│ДьВ░ы▓ХьЭШ ъ▓АьжЭ ы░П ьЭ╝ы╢А ъ░ЬьДаьЭД ьЛЬыПДэХШьШАыЛд.
эЩЬьг╝ьДаьЭ┤ ы░ЫыКФ эЮШ ьД▒ы╢ДьЭА ыПЩьЬаь▓┤ыае, ы╢Аыае, ызИь░░ыае ыУ▒ьЬ╝ыбЬ ы╢ДыеШэХа ьИШ ьЮИьЬ╝ый░, ьЭ┤ ьдСьЧРьДЬ эК╣эЮИ ъ│аьЖН эЩЬьг╝ ьЛЬьЧРыКФ ыПЩьЬаь▓┤ыаеьЭШ ы╣ДьдСьЭ┤ эБмъ│а ьЭ┤ьЧР ыМАэХЬ ьаХыПД ыЖТьЭА ь╢ФьаХьЭ┤ эХДьЪФэХШыЛд.
Wagner(1931) ыУ▒ьЭД ьЛЬьЮСьЬ╝ыбЬ эЩЬьг╝ьДаьЭД ьЮСьЭА ьвЕэЪбы╣Д(Aspect ratio)ьЭШ ьД╕ьЮеь▓┤ыбЬ ъ░АьаХэХШьЧм ьЧмыЯм 2ь░иьЫР эЪбыЛиый┤ьЬ╝ыбЬ ыВШыИИ эЫД, ьЪ┤ыПЩыЯЙьЭ┤ыбаьЧР ъ╖╝ъ▒░эХШьЧм ъ░Б ыЛиый┤ ыПЩьЬаь▓┤ыаеьЭД ь╢ФьаХэХШыКФ ьЧ░ъ╡мъ░А ьзАьЖНыРШьЦ┤ ьЩФыЛд. ьДаь▓┤ые╝ ьЧмыЯм эЪбыЛиый┤ыУдыбЬ ы╢ДэХаэХШьЧм ъ│ДьВ░эХШыКФ ьЭ┤ые╕ы░Ф ьКдэК╕ыж╜ ы░йы▓Х(Strip method)ьЭА ьаАьЖН ы░░ьИШыЯЙэШХьДаьЧРыКФ ъ│╝ъ▒░ы╢АэД░ ыДРыжм ьаБьЪйыРШьЧИьЬ╝ый░, ы░░ьИШыЯЙэШХьДаьЭА ьЮРьД╕ ы│АэЩФъ░А эБмьзА ьХКьЬ╝ыпАыбЬ ьДаэШХ ьКдэК╕ыж╜ ы░йы▓ХыПД ьаБьаИэХШыЛд.
Martin(1976)ьЭА ьДаэШХ ьКдэК╕ыж╜ ы░йы▓ХьЭД ьг╝эШХ эЩЬьг╝ьДаьЧР ьаБьЪйэХШьЧм ьг╝эММьИШьШБьЧн ьЪ┤ыПЩ ы╢ДьДЭьЭД ьЛЬыПДэХЬ ы░Ф ьЮИыЛд. эХШьзАызМ эЩЬьг╝ьДаьЭА ьЖНыПД ы│Д ьЮРьД╕ ы│АэЩФъ░А эБмъ╕░ ыХМым╕ьЧР ьКдэК╕ыж╜ ы░йы▓Х ьЧньЛЬ ы╣ДьДаэШХьЬ╝ыбЬ эЩХьЮеэХа эХДьЪФъ░А ьЮИьЬ╝ый░,
Zarnick(1978)ьЭА ы╣ДьДаэШХ ьКдэК╕ыж╜ ы░йы▓ХьЬ╝ыбЬ ьЛЬъ░Д ьШБьЧньЧРьДЬ эЩЬьг╝ьДа ьЪ┤ыПЩьЭД ъ│ДьВ░эХШьШАыЛд. ьжЙ, ызд ьИЬъ░ДызИыЛд ъ░Б эЪбыЛиый┤ьЭШ ьЛдьаЬ ь╣иьИШый┤ьаБьЭД ъ│аыадэХШьЧм ъ░Б эЮШ ьД▒ы╢ДыУдьЭД ъ│ДьВ░эХШъ│а ьЪ┤ыПЩьЭД ь╢ФьаХэХШьШАыЛд. ZarnickьЭ┤ ьаЬьХИэХЬ ъ│ДьВ░ы▓ХьЭА
Keuning(1994),
Akers(1999),
Van Deyzen(2008) ыУ▒ьЧР ьЭШэХ┤ ь╡Ьъ╖╝ъ╣МьзА ьг╝эШХ эЩЬьг╝ьДаьЧР ьЭСьЪйыРЬ ы░Ф ьЮИыЛд.
ы│╕ ьЧ░ъ╡мьЧРьДЬыКФ ZarnickьЭШ ы╣ДьДаэШХ ьКдэК╕ыж╜ ы░йы▓ХьЭД ъ╕░ы░ШьЬ╝ыбЬ ъ╖Ьь╣ЩэММ ьдС эЩЬьг╝ьДа ьЧ░ьзБый┤ ьЪ┤ыПЩ ь╢ФьаХ эФДыбЬъ╖╕ыЮиьЭД ьЮСьД▒эХШьШАыЛд. ъ╖╕ыжмъ│а ыМАьГБ эЩЬьг╝ьДаьЭШ ьЪ┤ыПЩьЭД ъ│ДьВ░эХШьШАьЬ╝ый░, ы│СэЦЙэХШьЧм ьИШэЦЙэХЬ ыкиэШХ ьЛЬэЧШ ъ▓░ъ│╝ьЩА ы╣Дъ╡РэХШьШАыЛд. ьЪ░ьДа ZarnickьЭШ ъ│ДьВ░ ы░йы▓ХьЭА ьДаьаАъ▓╜ьВмъ░БьЭ┤ ыкиыУа ыЛиый┤ьЧРьДЬ ьЭ╝ьаХэХЬ ьг╝эШХ эЩЬьг╝ьДаьЭД ыМАьГБьЬ╝ыбЬ эХШыпАыбЬ, ьЭ╝ы░ШьаБьЭ╕ ы╣Дьг╝ьГБэШХ эЩЬьг╝ьДаьЧР ьаБьЪйэХа ьИШ ьЮИыПДыбЭ ъ│ДьВ░ьЭД ъ░ЬьДаэХШьШАыЛд. ъ╖╕ыжмъ│а ьаХьИШ ьдС ьЖНыПДы│Д эХньг╝ьЮРьД╕ ьЛЬэЧШ ъ▓░ъ│╝ые╝ ы░ФэГХьЬ╝ыбЬ ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШые╝ ы│╕ ыМАьГБьДаьЧР ызЮыПДыбЭ ьаБьаИэЮИ ьИШьаХэХШьШАыЛд. ызИьзАызЙьЬ╝ыбЬ ъ░Б эЪбыЛиый┤ьЭШ ьЛдьаЬ ь╣иьИШ ъ╣КьЭ┤ые╝ ьаХэЩХэХШъ▓М ы░ШьШБэХШъ╕░ ьЬДэХШьЧм ь╡Ьъ╖╝ эГА ьЧ░ъ╡м ъ▓░ъ│╝ые╝ ы░ФэГХьЬ╝ыбЬ тАШPile-upтАЩ ы│┤ьаХ ъ│ДьИШые╝ ьаХыПД ыЖТъ▓М ьИШьаХэХШьШАыЛд. ъ│ДьВ░ ъ▓░ъ│╝ыКФ ыкиэШХьЛЬэЧШъ│╝ ы╣Дъ╡РэХШьЧм ъ▓АьжЭэХШьШАъ│а, ьЛЬэЧШ ъ▓░ъ│╝ые╝ ьЮШ ь╢ФьаХэХа ьИШ ьЮИьЭМьЭД ы│┤ьШАыЛд.
2. эЩЬьг╝ьДа ьЧ░ьзБый┤ ьЪ┤ыПЩ ь╢ФьаХы▓Х
2.1 ьвМэСЬъ│ДьЩА ьЪ┤ыПЩы░йьаХьЛЭ
ы│╕ ьЮеьЧРьДЬыКФ
Zarnick(1978)ьЧР ьЭШэХ┤ ьаЬьХИыРЬ ъ╖Ьь╣ЩэММ ьдС ьг╝ьГБь▓┤ эЩЬьг╝ьДа ьЧ░ьзБый┤ ьЪ┤ыПЩьЭШ ьЭ┤ыбаьаБ ъ│ДьВ░ ы░йы▓ХьЭД ьЪФьХ╜эХШьШАыЛд. ьЪ░ьДа
Zarnick(1978)ьЭ┤ эЩЬьг╝ьДаьЭШ ьЧ░ьзБый┤ ьЪ┤ыПЩьЭД эСЬэШДэХШъ╕░ ьЬДэХ┤ ьВмьЪйэХЬ ьвМэСЬъ│ДыКФ
Fig. 1ъ│╝ ъ░ЩыЛд. ьЮРьЬаэСЬый┤ъ│╝ эПЙэЦЙэХЬ ьДаь▓┤ ьаДьзДы░йэЦеьЭ┤
xь╢Х, ьЧ░ьзБэХШы░йьЭ┤
yь╢ХьЭ┤ъ│а ъ│╡ъ░ДьГБьЧР ъ│аьаХыРЬ эХЬ ьаРьЭД ьЫРьаР oыбЬ эХШыКФ ъ│╡ъ░Дъ│аьаХьвМэСЬъ│Д o-
xzьЩА, ьДаьИШы░йэЦеьЭ┤ ╬╛ь╢Х, ьДаьаАы░йэЦеьЭ┤ ╬╢ь╢ХьЭ┤ъ│а ьЫРьаР Oъ░А ым┤ъ▓МьдСьЛмьЧР ьЬДь╣ШэХЬ ьДаь▓┤ъ│аьаХьвМэСЬъ│Д O-╬╛╬╢ыбЬ ъ╡мьД▒ыРЬыЛд.
Fig.┬а1
Coordinate system
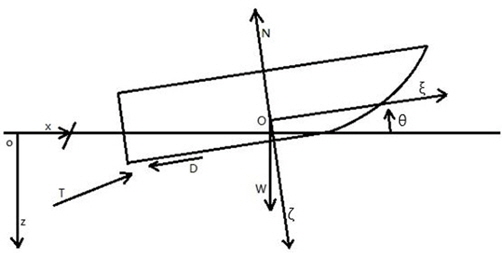
Fig. 1ьЧРьДЬ ы│┤ыКФ ы░ФьЩА ъ░ЩьЭ┤ эЩЬьг╝ьДаьЭ┤ эХньг╝эХа ыХМ ьЧ░ьзБ эХШы░йьЬ╝ыбЬ ьдСыЯЙ
W, ьДаьаАый┤ьЧР ы▓ХьДаы░йэЦе ьЬаь▓┤ыае
N, ьДаьаАый┤ьЭШ ьаСьДа ы░йэЦеьЬ╝ыбЬ ызИь░░ыае
D, ъ╖╕ыжмъ│а ьДаып╕ы╢АьЧР ь╢Фыае
Tъ░А ьЮСьЪйэХЬыЛд. ь░╕ъ│аыбЬ
NыКФ ы▓ХьДаы░йэЦе ьЬаь▓┤ьХХыаеьЧР ьЭШэХЬ ыПЩьЬаь▓┤ыаеъ│╝ ы╢Аыае ьД▒ы╢ДьЭД ыкиыСР эПмэХиэХЬыЛд.
эЩЬьг╝ьДаьЭШ ьаДэЫДыПЩьЪФ, ьГБэХШыПЩьЪФ, ьвЕыПЩьЪФ ы│АьЬДые╝ ъ░Бъ░Б xCG, zCG, ╬╕ыЭ╝ъ│а эХа ыХМ ьЪ┤ыПЩы░йьаХьЛЭьЭД ъ╡мьД▒эХШый┤ ьЛЭ (1)ъ│╝ ъ░ЩыЛд.
ьЧмъ╕░ьДЬ Mъ│╝ IыКФ ъ░Бъ░Б эЩЬьг╝ьДаьЭШ ьзИыЯЙъ│╝ ьвЕыПЩьЪФ ъ┤АьД▒ыкиыйШэК╕ьЭ┤ый░, Tx, TzыКФ ь╢ФыаеьЭШ x, zы░йэЦе ы▓бэД░ьД▒ы╢ДьЭ┤ыЛд. ъ╖╕ыжмъ│а xc, xd, xpыКФ ъ░Бъ░Б ым┤ъ▓МьдСьЛмы╢АэД░ N, D, T ы▓бэД░ъ╣МьзАьЭШ ъ▒░ыжмые╝ ьЭШып╕эХЬыЛд.
ьДаь▓┤ъ│аьаХьвМэСЬъ│ДьЧРьДЬьЭШ ьЮДьЭШьЭШ ьаР P(╬╛,╬╢) ьвМэСЬые╝ эЩЬьг╝ьДа ым┤ъ▓М ьдСьЛм ы│АьЬД (xCG, zCG)ые╝ ьЭ┤ьЪйэХШьЧм ъ│╡ъ░Дъ│аьаХьвМэСЬъ│ДьЧРьДЬьЭШ ьвМэСЬ P(x, z)ыбЬ ы│АэЩШэХШый┤ ьЛЭ (2)ьЩА ъ░ЩыЛд.
эХЬэО╕, ьЮеэММьаХ ьДаьИШъ╖Ьь╣ЩэММ эММый┤ы│АьЬД rьЭА ьЬДь╣Ш xьЩА ьЛЬъ░Д tьЭШ эХиьИШыбЬьДЬ ьЛЭ (3)ъ│╝ ъ░ЩьЭ┤ эСЬэШДыРЬыЛд.
ьЛЭ (3)ьЧРьДЬ ╧ЙыКФ эММьЭШ ьЫРьг╝эММьИШ, AыКФ эММьзДэПньЭ┤ый░, kыКФ эММьИШьЭ┤ыЛд.
эХньг╝эХШыКФ эЩЬьг╝ьДаьЭ┤ ъ╖Ьь╣ЩэММые╝ ьб░ьЪ░эХа ыХМ эММыЮСьЧР ьЭШэХЬ ьЬаьЖН ьдС ьИШэПЙы░йэЦе ьД▒ы╢ДьЭА эЩЬьг╝ьДа ьаДьзДьЖНыПДьЧР ы╣ДэХ┤ ым┤ьЛЬэХаызМэБ╝ ьЮСыЛдъ│а ъ░АьаХэХШъ│а, эММыЮСьЧР ьЭШэХЬ ьЬаьЖН ьдС ьИШьзБы░йэЦе ьД▒ы╢ДьЭ╕ wzызМ ъ│аыадэХШьЧм эЩЬьг╝ьДа ъ╕░ьдАьДаьЧР ыМАэХЬ ьаСьДа ы░П ы▓ХьДаы░йэЦе ьЬаь▓┤ьГБыМАьЖНыПД U, Vые╝ ьИШьЛЭэЩФэХШый┤ ьЛЭ (4)ьЩА ъ░ЩыЛд.
2.2 ыПЩьЬаь▓┤ыае ь╢ФьаХы▓Х
эЩЬьг╝ьДаьЭШ ъ░Б 2ь░иьЫР эЪбыЛиый┤ьЭ┤ ы░ЫыКФ ыПЩьЬаь▓┤ыаеьЭА ьЪ┤ыПЩыЯЙьЭШ ьЛЬъ░Д ы│АэЩФьЬиъ│╝ эЪбыеШьаАэХн(Cross flow drag)ьЭШ эХйьЬ╝ыбЬ эСЬэШДэХа ьИШ ьЮИьЬ╝ый░, эХЬ эЪбыЛиый┤ьЭШ ыПЩьЬаь▓┤ыае fые╝ ьИШьЛЭэЩФэХШый┤ ьЛЭ (5)ьЩА ъ░ЩыЛд.
ьЧмъ╕░ьДЬ maыКФ ъ░Б эЪбыЛиый┤ьЭШ ы╢Аъ░АьзИыЯЙ, CD,cыКФ эЪбыеШьаАэХнъ│ДьИШ, ╧БыКФ ьЬаь▓┤ьЭШ ы░АыПДьЭ┤ыЛд. ъ╖╕ыжмъ│а bыКФ эХ┤ыЛ╣ эЪбыЛиый┤ьЭШ ь╣иьИШ ы░ШэПньЭ┤ыЛд.
ьЛЭ (5)ьЧРьДЬ ьЪ┤ыПЩыЯЙьЭШ ьЛЬъ░Ды│АэЩФьЬиьЭ╕ ь▓л ы▓Иьз╕ эХньЧРьДЬ ы╢Аъ░АьзИыЯЙ maыКФ ыПЩьЭ╝ ьЛЬъ░ДьЭ┤ыЭ╝ыПД ъ░Б эЪбыЛиый┤ьЧР ыФ░ыЭ╝ ыЛдые╝ ьИШ ьЮИыЛд. ьжЙ, ьЛЬъ░Д tьЭШ эХиьИШьЭ╝ ы┐РызМ ьХДыЛИыЭ╝ ьаДэЫДы░йэЦе ьвМэСЬ ╬╛ьЭШ эХиьИШьЭ┤ыпАыбЬ ьаДъ░ЬэХШый┤ ьЛЭ (6)ъ│╝ ъ░ЩыЛд.
ьДаьаАъ▓╜ьВмъ░БьЭ┤ ьЭ╝ьаХэХЬ эЩЬьг╝ьДаьЭШ ыкиыУа эЪбыЛиый┤ьЭА ьРРъ╕░эШХьГБьЭ┤ый░ ъ╖╕ ы╢Аъ░АьзИыЯЙьЭА ьЛЭ (7)ъ│╝ ъ░ЩыЛд.
ьЛЭ (7)ьЧРьДЬ kaыКФ ы╢Аъ░АьзИыЯЙъ│ДьИШьЭ┤ый░ ZarnickьЭА 1.0ьЭД ьВмьЪйэХШьШАыЛд. ъ╖╕ыжмъ│а ы╢Аъ░АьзИыЯЙьЭШ ьЛЬъ░Ды│АэЩФьЬиьЭА ьЛЭ (8)ъ│╝ ъ░ЩьЭ┤ ьаДъ░ЬыРЬыЛд.
ьЛЭ (8)ьЭШ 2эЦЙьЭА ь╣иьИШ ы░ШэПн
bые╝ ъ╕░ьдАьДа ы▓ХьДаы░йэЦе ь╣иьИШ ъ╣КьЭ┤
dьЩА ъ╕░эХШэХЩьаБ ъ┤Аъ│Дые╝ ьЭ┤ьЪйэХШьЧм ьаДъ░ЬэХЬ ъ▓ГьЭ┤ыЛд. 3эЦЙьЭА ьРРъ╕░эШХьГБьЭ┤ ьИШьзБ ьЮЕьИШэХа ыХМ ь┤Иъ╕░ ьаХьИШый┤ ъ╕░ьдАьЬ╝ыбЬ ьРРъ╕░ эСЬый┤ьЭД ыФ░ыЭ╝ ьЮРьЬа ьИШый┤ьЭ┤ ыНФ ыЖТъ▓М ьЖЯьХДьШдые┤ыКФ тАШPile-upтАЩ эШДьГБьЭД ъ│аыадэХШъ╕░ ьЬДэХ┤ ы│┤ ьаХъ│ДьИШ
Cpuые╝ ъ│▒эХЬ ъ▓ГьЭ┤ыЛд.
Wagner(1931)ьЧР ьЭШэХШый┤
CpuыКФ ╧А/2ьЭ┤ыЛд. 4эЦЙьЭА эММьЮеьЭ┤ эЩЬьг╝ьДа эЭШьИШьЧР ы╣ДэХ┤ ыздьЪ░ эБмъ│а эММ ъ╕░ьЪ╕ъ╕░ъ░А ьЮСыЛдыКФ ъ░АьаХ эХШьЧР ь╣иьИШ ъ╣КьЭ┤
dые╝ ъ│╡ъ░ДьвМэСЬьГБьЭШ ьГБэХШ ы│АьЬД
zьЩА эММый┤ы│АьЬД
rьЭШ ыЖТьЭ┤ ь░иыбЬ ы│АэЩШэХЬ ъ▓ГьЭ┤ыЛд.
vыКФ эММ ъ╕░ьЪ╕ъ╕░ьЭ┤ыЛд.
ь░иьЭ╕ьЭ┤ ь╣иьИШыРШыКФ ъ▓╜ьЪ░ьЧРыКФ ьЛЭ (7), (8)ьЧРьДЬ ь╣иьИШ ы░ШэПн bъ░А ь░иьЭ╕ ы░ШэПн bcьЬ╝ыбЬ ьЭ╝ьаХэХШыЛд. ыФ░ыЭ╝ьДЬ ьЭ┤ ъ▓╜ьЪ░ ы╢Аъ░АьзИыЯЙъ│╝ ы╢Аъ░АьзИыЯЙ ьЛЬъ░Ды│АэЩФьЬиьЭА ьЛЭ (9)ьЩА ъ░ЩыЛд.
ьЛЭ (5)ьЧРьДЬ ыСР ы▓Иьз╕ эХньЭА ьЖНыПДьЭШ ьаЬъ│▒ьЧР ы╣ДыбАэХШыКФ эЪбыеШьаАэХн ьД▒ы╢ДьЭ┤ыЛд. эЪбыеШьаАэХнъ│ДьИШ CD,cыКФ эПЙэМРьЭ╝ ъ▓╜ьЪ░ 1.0ьЭД, ьДаьаАъ▓╜ьВмъ░Б ╬▓ые╝ ъ░ЦыКФ VэШХ ьДаьаАьЭШ ъ▓╜ьЪ░ 1.0cos╬▓ые╝ ьВмьЪйэХЬыЛд.
2.3 ы╢Аыае ь╢ФьаХы▓Х
эЩЬьг╝ьДаьЧРыКФ ь╣иьИШ ы╢АэФ╝ьЧР ьГБьЭСэХШыКФ ьЬаь▓┤ьЭШ ьдСыЯЙьЭ┤ ьЧ░ьзБьГБы░йьЬ╝ыбЬ ъ░АэХ┤ьзАый░ ьЭ┤ эЮШьЭ┤ ы╢АыаеьЭ┤ыЛд. эЩЬьг╝ьДаьЭШ эХЬ эЪбыЛиый┤ьЭШ ь╣иьИШыЛиый┤ьаБьЭ┤ AsьЭ╝ ыХМ ъ╖╕ эЪбыЛиый┤ьЭ┤ ы░ЫыКФ ы╢Аыае fBыКФ ьЛЭ (10)ъ│╝ ъ░ЩыЛд. gыКФ ьдСыаеъ░АьЖНыПДьЭ┤ыЛд.
ыЛи, эЩЬьг╝ьДаьЭ┤ ъ│аьЖН эХньг╝эХа ъ▓╜ьЪ░ эК╕ыЮЬьДмъ│╝ ь░иьЭ╕ ъ╖╝ь▓ШьЧРьДЬ ьЬаыПЩ ы░Хыжмъ░А ы░ЬьГЭэХШъ│а, ьЭ┤ ы╢Аъ╖╝ьЭШ ьХХыаеьЭ┤ ыМАъ╕░ьХХ эШ╣ьЭА ъ╖╕ ьЭ┤эХШъ░А ыРШый┤ьДЬ ьаДь▓┤ ы╢АыаеыПД ьЭ╝ы╢А ъ░РьЖМэХЬыЛдыКФ
Shuford(1957) ыУ▒ьЭШ ьЧ░ъ╡мъ░А ьЮИыЛд. ZarnickыПД ьЭ┤ые╝ ьЭ╕ьЪйэХШьЧм ьЛЭ (10)ьЧРьДЬ ы╢Аыаеы│┤ьаХъ│ДьИШ
bfые╝ 0.5ыбЬ ыМАьЮЕэХШьШАыЛд. ыШРэХЬ ы╢АыаеьЧР ьЭШэХЬ ьвЕыПЩьЪФ ыкиыйШэК╕ые╝ ъ│ДьВ░эХа ыХМ ым┤ъ▓МьдСьЛмы╢АэД░ ъ░Б эЪбыЛиый┤ъ╣МьзАьЭШ ы╢АыаеыкиыйШэК╕ьХФьЧР ы│┤ьаХъ│ДьИШ
bmые╝ ь╢Фъ░АыбЬ ъ│▒эХШьШАъ│а, ъ╖╕ ъ░ТьЭА 0.5ьЭ┤ыЛд.
2.4 ьИШьЛЭ ыЛиьИЬэЩФ ы░П ьаДъ░Ь
эЩЬьг╝ьДаьЭ┤ ыУ▒ьЖН эХньг╝ ьЛЬ ьаДэЫДы░йэЦе ьЖНыПД

ъ░А ьЭ╝ьаХэХШъ│а, ь╢Фыаеъ│╝ ызИь░░ыаеьЭ┤ ъ╖╝ьВмьаБьЬ╝ыбЬ ым┤ъ▓МьдСьЛмьЧР ъ░АэХ┤ьзАый░ ыСР эЮШьЭ┤ эХньГБ эПЙэШХьЭД ьЭ┤ыгмыЛдъ│а эХШьЧм ьЖМъ▒░эХШый┤ ьЛЭ (1)ьЭА ьЛЭ (11)ь▓ШыЯ╝ ыЛиьИЬэЩФыРЬыЛд. ьЭ┤ыКФ ьШИьЭ╕ьИШьб░ьЧРьДЬ ьГБэХШыПЩьЪФ, ьвЕыПЩьЪФые╝ ьаЬьЩ╕эХЬ ьЪ┤ыПЩьЭД ъ╡мьЖНэХШъ│а эЩЬьг╝ьДа ыкиэШХьЭШ ым┤ъ▓МьдСьЛм ьЬДь╣Шые╝ ыУ▒ьЖН ьШИьЭ╕эХШыКФ ъ▓╜ьЪ░ьЩА ъ░ЩыЛд.
ьЛЭ (11)ьЭШ ьЪ░ы│АьЧРьДЬ ьГБэХШыПЩьЪФ ы░йэЦе ьЬаь▓┤ыаеъ│╝ ьвЕыПЩьЪФ ы░йэЦе ьЬаь▓┤ыаеыкиыйШэК╕ эХньЭШ ъ╡мь▓┤ьаБьЭ╕ ьаДъ░Ь ъ│╝ьаХьЭА ы╢АыбЭьЧР ьЪФьХ╜эХШьШАыЛд.
3. ыМАьГБ эЩЬьг╝ьДа
ы│╕ ыЕ╝ым╕ьЧРьДЬ ъ│ДьВ░ьЭД ьИШэЦЙэХЬ ыМАьГБ эЩЬьг╝ьДаьЭА эБмыгиьжИ ыаИьаАы│┤эК╕ьЭ┤ый░
Kim et al.(2013)ьЭШ ьЧ░ъ╡мьЧР эЩЬьЪйыРЬ ыМАьГБьДаъ│╝ ыПЩьЭ╝эХЬ ьДаэШХьЭ┤ыЛд. ьДдъ│Д ьЛдьДаьЭШ ьаХый┤ьДаыПДьЩА ь╕бый┤ьДаыПДыКФ ъ░Бъ░Б
Fig. 2,
Fig. 3ъ│╝ ъ░ЩыЛд.
Fig.┬а2
Body plan of a leisure boat
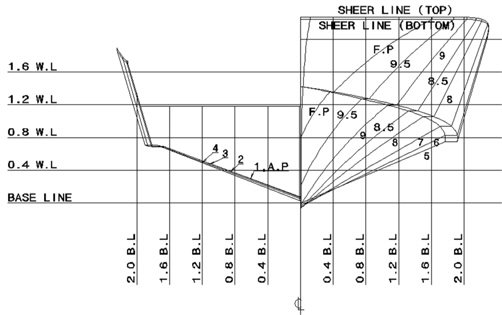
Fig.┬а3
Shear plan of a leisure boat
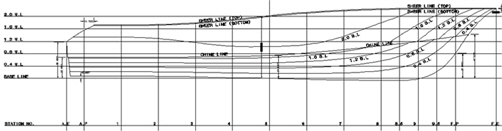
ьИШьб░ьЛЬэЧШьЭД ьЬДэХ┤ ьаЬьЮСэХЬ 1/6 ь╢ХьЖМ ыкиэШХьЭ┤ ьаЬьЮСыРШьЧИъ│а, ъ╖╕ ьг╝ьЪФ ьаЬьЫРьЭА
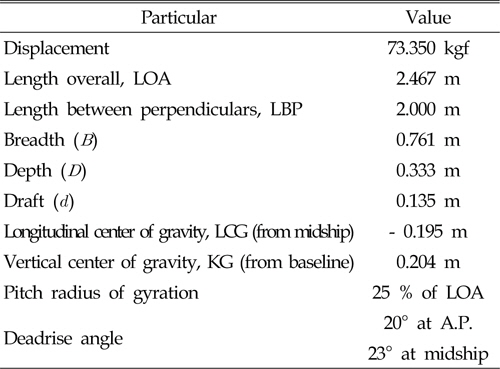
Table 1ьЧР ьаХыжмэХШьШАыЛд.
Table┬а1
Main particulars of model ship
Kim et al.(2013)ьЧРьДЬ ы│╕ ыкиэШХьДаьЭШ ьаХьИШ ы░П ьДаьИШ ъ╖Ьь╣ЩэММ ьдС ьИШьб░ ыкиэШХ ьЛЬэЧШьЭ┤ ьИШэЦЙыРЬ ы░Ф ьЮИыЛд. ы│╕ ьЧ░ъ╡мьЧРьДЬ ьИШэЦЙыРЬ ъ│ДьВ░ьЭШ ьаХэЩХыПДые╝ эММьХЕэХШъ╕░ ьЬДэХШьЧм
Kim et al.(2013)ьЧРьДЬ ьЭ╕ьЪйыРЬ ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ые╝ 4ьЮеьЧРьДЬ ъ│ДьВ░ ъ▓░ъ│╝ьЩА ы╣Дъ╡РэХШьЧм ыПДьЛЬэХШьШАыЛд.
4. ыМАьГБ эЩЬьг╝ьДа ьД▒ыКе ь╢ФьаХ ы░П ъ│ДьВ░ы░йы▓Х ъ░ЬьДа
4.1 ъ│ДьВ░ ъ│╝ьаХьЭШ ъ░ЬьЪФ
2ьЮеьЭШ ьЭ┤ыба ъ│ДьВ░ы▓ХьЧР ъ╖╝ъ▒░эХШьЧм ъ╖Ьь╣ЩэММ ьдС эЩЬьг╝ьДа ьЧ░ьзБый┤ ьЪ┤ыПЩ ъ│ДьВ░ эФДыбЬъ╖╕ыЮиьЭД ьЮСьД▒эХШьШАыЛд. ьЩДьД▒ыРЬ эФДыбЬъ╖╕ыЮиьЬ╝ыбЬ
Zarnick(1978)ьЭШ ьЧ░ъ╡мьЧРьДЬьЩА ыПЩьЭ╝эХЬ ьг╝эШХ эЩЬьг╝ьДаьЭШ ьЪ┤ыПЩьЭД ъ│ДьВ░эХШьШАъ│а, ъ╖╕ ъ▓░ъ│╝ъ░А
Fridsma(1969)ьЧР ьЭШэХШьЧм ьДаэЦЙыРЬ ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ьЩА ьЮШ ьЭ╝ь╣ШэХШый░ ьШдыеШъ░А ьЧЖьЭМьЭД эЩХьЭ╕эХШьШАыЛд.
Zarnick(1978)ьЭШ ъ│ДьВ░ы▓ХьЭА ьг╝эШХ эЩЬьг╝ьДаьЧРызМ ъ╡нэХЬыРЬыЛд. ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШыПД ъ│ДьВ░ ъ▓АьжЭьЧР ьВмьЪйыРЬ ьД╕ ъ░АьзА ьг╝эШХ эЩЬьг╝ьДаьЭШ ьаХьИШ ьдС эК╣ьаХ ьЖНыПД ьШБьЧн ьЛЬэЧШ ьЮРыгМызМьЭД ъ╖╝ъ▒░ыбЬ ъ▓░ьаХэХШьШАыЛд. ъ╖╕ыжмъ│а Pile-up ы│┤ьаХъ│ДьИШые╝
Wagner(1931)ьЭШ ьЭ┤ыба ъ│ДьВ░ьЭД ь░╕ъ│аэХШьЧм ьГБьИШыбЬ ыМАьЮЕэХШьШАьЬ╝ыВШ ъ╖╕ ьЭ┤эЫДьЭШ ьЧ░ъ╡мыУдьЧРьДЬыКФ ьЮЕьИШэХШыКФ ьРРъ╕░эШХьГБ ыЛиый┤ьЭШ ьДаьаАъ▓╜ьВмъ░БьЧР ыФ░ыЭ╝ Pile-up ыРШыКФ ьаХыПДъ░А ыЛмыЭ╝ьзРьЭ┤ ы░ЭэШАьбМьЬ╝ыпАыбЬ
Wagner(1931)ьЭШ ъ▓░ъ│╝ыКФ ьЛдьаЬ эШДьГБъ│╝ ыЛдьЖМ ь░иьЭ┤ъ░А ьЮИыЛд. ы│╕ ьЧ░ъ╡мьЧРьДЬыКФ ьЭ┤ьЩА ъ░ЩьЭА ьД╕ ъ░АьзАьЭШ эХЬъ│ДьаРьЭД эММьХЕэХШъ│а, ъ░ЬьДаьЭД ьЬДэХШьЧм
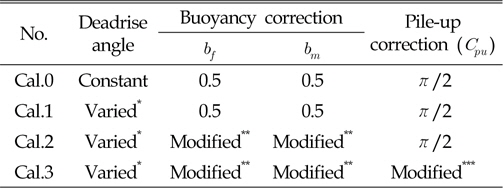
Zarnick(1978) ъ│ДьВ░ ы░йы▓ХьЭД эПмэХиэХЬ ь┤Э 4ыЛиъ│ДьЭШ ъ│ДьВ░ьЭД ьИШэЦЙэХШьШАыЛд. ъ░Б ыЛиъ│ДьЭШ ъ│ДьВ░ ьб░ъ▒┤ьЭД эСЬыбЬ ьаХыжмэХШый┤
Table 2ьЩА ъ░ЩыЛд.
Table┬а2
Condition of variables in present calculations
4.2 ъ░Б эЪбыЛиый┤ы│Д ьДаьаАъ▓╜ьВмъ░Б ы│АэЩФ ъ│аыад
2ьЮеьЧР ьЪФьХ╜эХЬ ZarnickьЭШ ъ│ДьВ░ы▓ХьЭА ьг╝эШХ эЩЬьг╝ьДаьЭД ыМАьГБьЬ╝ыбЬэХШый░, эК╣эЮИ ьЛЭ (8) ыУ▒ьЧРьДЬ ьДаьаАъ▓╜ьВмъ░Б ╬▓ые╝ ыкиыУа эЪбыЛиый┤ьЧРьДЬ ьЭ╝ьаХэХШыЛдъ│а ъ░Дьг╝эХЬыЛд. эХШьзАызМ ыМАьГБьДаьЭД ы╣ДыбпэХШьЧм ыМАы╢Аы╢ДьЭШ эЩЬьг╝ьДаьЭА ьДаьИШы╢А ьЮЕьИШ ь╢йъ▓йьЭД ьдДьЭ┤ъ╕░ ьЬДэХ┤ ьДаьИШы╢АыбЬ ъ░ИьИШыбЭ ьДаьаАъ▓╜ьВмъ░БьЭ┤ ь╗дьзАыКФ ы╣Дьг╝ьГБь▓┤ эШХьГБьЭД ъ░ЦыКФыЛд. ыПЩьЬаь▓┤ыаеьЭД ьаХыПД ыЖТъ▓М ь╢ФьаХэХШыадый┤ ъ░Б эЪбыЛиый┤ ы│Д ьДаьаАъ▓╜ьВмъ░Б ы│АэЩФые╝ ъ│аыадэХШьЧмьХ╝ эХЬыЛд.
ьЛЭ (7), (8)ьЧРьДЬ эЪбыЛиый┤ьЭШ ы╢Аъ░АьзИыЯЙъ│╝ ы╢Аъ░АьзИыЯЙ ьЛЬъ░Ды│АэЩФьЬиьЭА ызд ьИЬъ░Д ь╣иьИШ ы░ШэПньЬ╝ыбЬ ъ▓░ьаХыРЬыЛд. ъ░Б ыЛиый┤ ь╣иьИШ ъ╣КьЭ┤(d)ьЧРьДЬ ъ╕░эХШэХЩьаБ ъ┤Аъ│ДыбЬ ь╣иьИШ ы░ШэПн(b)ьЭД ыПДь╢ЬэХШыКФ ъ│╝ьаХьЧРьДЬ ъ░Б эЪбыЛиый┤ ы│ДьДаьаАъ▓╜ьВмъ░Б(╬▓i) ы│АэЩФые╝ ъ│аыадэХШьШАыЛд. ьг╝ьЪФ ыВ┤ьЪйьЭД ьИШьЛЭэЩФэХШый┤ ьЛЭ (12)ьЩА ъ░Щъ│а, ьХДыЮШ ь▓иьЮР iыКФ эХ┤ыЛ╣ эЪбыЛиый┤ ы▓ИэШ╕ьЭ┤ыЛд.
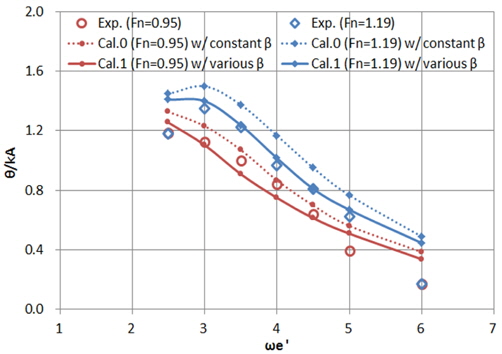
ыМАьГБ эЩЬьг╝ьДаьЭШ ьДаьаАъ▓╜ьВмъ░Б ы│АэЩФые╝ ъ│аыадэХШьЧм ьЪ┤ыПЩ ъ│ДьВ░эХЬ ъ▓░ъ│╝(Cal.1)ыКФ
Figs. 4-
5ьЭШ ьЛдьДаъ│╝ ъ░ЩыЛд. ыкиыУа эЪбыЛиый┤ ьДаьаАъ▓╜ьВмъ░БьЭД 20ыПДыбЬ ьЭ╝ьаХэХШъ▓М ыМАьЮЕэХЬ ъ│ДьВ░ ъ▓░ъ│╝(Cal.0)ыПД ьаРьДаьЬ╝ыбЬ эХиъ╗Ш ыПДьЛЬэХШьШАыЛд. ьДаьаАъ▓╜ьВмъ░Б ы│АэЩФые╝ ы░ШьШБэХа ъ▓╜ьЪ░ ьДаьИШы╢Аъ░А ьЮЕьИШэХа ыХМ ы░ЫыКФ ьЩ╕ыаеьЭ┤ ьЮСьХДьзАый┤ьДЬ ьЪ┤ыПЩ ьзДэПньЭ┤ ъ░РьЖМэХЬыЛд.
Fig.┬а4
Heave response with and without deadrise angle variation
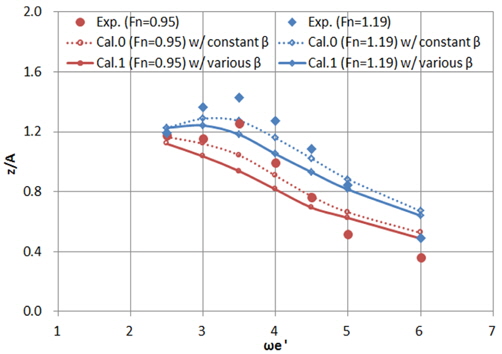
Fig.┬а5
Pitch response with and without deadrise angle variation
4.3 ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШ ьИШьаХ
Zarnick(1978)ьЭА ъ│ДьВ░ ъ▓АьжЭьЧР ьВмьЪйэХЬ ьг╝эШХ эЩЬьг╝ьДаьЭШ эПЙъ╖а эХньг╝ьЮРьД╕ые╝ ьаБьаИэХШъ▓М ызЮь╢Фъ╕░ ьЬДэХШьЧм ы╢Аыае ы│┤ьаХъ│ДьИШ
bfьЩА ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШ
bmьЭД ъ░Бъ░Б 0.5ыбЬ ьаЬьХИэХШьШАыЛд. эХШьзАызМ ьЭ┤ыКФ ZarnickьЭШ ъ▓АьжЭьЪй ьг╝эШХ эЩЬьг╝ьДаэШХьЭШ эК╣ьаХ ьЖНыПД ьШБьЧньЧРьДЬызМ ьаБэХйэХЬ ъ░ТьЭ┤ыЛд. ьДаэШХьЭ┤ыВШ ьЖНыПДьЧР ыФ░ыЭ╝ ьЬаыПЩ ы╢ДэПмъ░А ы░ФыАМый┤ ыЛмыЭ╝ьзИ ъ░АыКеьД▒ьЭ┤ ьЮИыЛдъ│а эМРыЛиэХШьЧм, ы│╕ ьЧ░ъ╡мьЭШ ыМАьГБьДаьЧР ьаБэХйэХЬ ы│┤ьаХъ│ДьИШые╝ ыЛдьЛЬ эГРьГЙэХШъ╕░ыбЬ эХШьШАыЛд.
bf ,
bmьЭД ъ░Бъ░Б 0.3~0.7 ыВ┤ьЧРьДЬ ы░Фъ┐Фъ░Аый┤ьДЬ ыМАьГБьДаьЭШ ьаХьИШ ьдС ьЖНыПДы│Д ы╢АьГБыЯЙъ│╝ эК╕ыж╝ъ░БьЭД ъ│ДьВ░эХШьШАыЛд. ъ│ДьВ░ ъ▓░ъ│╝ые╝ ьаХьИШ ьдС ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ьЩА эХиъ╗Ш ъ╖╕ыЮШэФДыбЬ ыВШэГАыВ┤ый┤
Figs. 6-
7ъ│╝ ъ░ЩыЛд.
Fig.┬а6
Rises of C.G. with variations of bf, bm
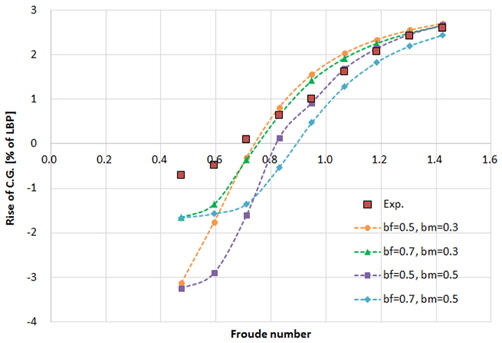
Fig.┬а7
Trim angles with variations of bf, bm

ъ░Б ьЖНыПД ьШБьЧн ы│ДыбЬ ьаХьИШ ьдС ьЛЬэЧШ ъ▓░ъ│╝ые╝ ъ╖╝ьВмэХШъ▓М ь╢ФьаХэХа ьИШ ьЮИыКФ
bf,
bmьЭД ь╢Фь╢ЬэХШьЧм
Table 3ьЧР ьаХыжмэХШьШАыЛд. ы╢Аыаеы│┤ьаХъ│ДьИШ
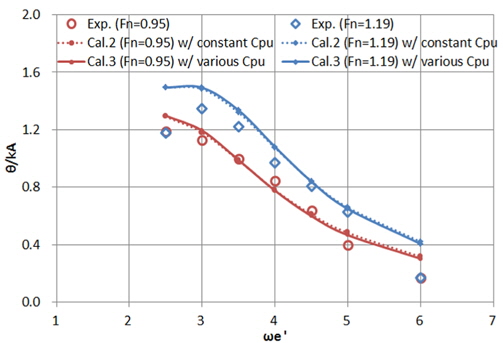
bfыКФ Froude ьИШ 1.19 ьЭ┤эХШьЧРьДЬыКФ 0.7ьЭД, ьЭ┤ые╝ ь┤Иъ│╝эХШыКФ ьЖНыПДьЧРьДЬыКФ 0.5ые╝ ьВмьЪйэХШыКФ ъ▓ГьЭ┤ ы░ФыЮМьзБэХШыЛд. Froude ьИШ 1.19ые╝ ь┤Иъ│╝эХШыКФ ъ│аьЖНьЧРьДЬ ь░иьЭ╕ъ│╝ эК╕ыЮЬьДм ыУ▒ьЧРьДЬ ы░Хыжм эШДьГБьЭ┤ эШДьаАэХШъ▓М ы░ЬьГЭэХШъ│а ьЭ┤ыбЬ ьЭ╕эХЬ ьХХыае ъ░ХэХШыбЬ ьаАьЖНьЭ╝ ыХМы│┤ыЛд ы╢Аыае ъ░РьЖМ ы╣ДьЬиьЭ┤ ыНФ эБ░ ъ▓ГьЬ╝ыбЬ ь╢ФьаХыРЬыЛд. эХЬэО╕ ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШ
bmыКФ Froude ьИШ 1.19 ып╕ызМьЧРьДЬыКФ 0.3, ъ╖╕ ьЭ┤ьГБьЧРьДЬыКФ 0.5ые╝ ьВмьЪйэХШыКФ ъ▓ГьЭ┤ ьаБьаИэХШыЛд. Froude ьИШ 1.19 ьЭ┤ьГБьЭШ ыЖТьЭА ьЖНыПДьЧРьДЬыКФ ьКдэФДыаИьЭ┤ьЧР ьЭШэХ┤ ьДаьИШы╢АьЧР ьХХыаеьЭ┤ ьзСьдСыРШьЦ┤ ьХХыае ьдСьЛмьЭ┤ ы│┤ыЛд ьДаьИШьк╜ьЬ╝ыбЬ ьЭ┤ыПЩэХШый░, ы╢АыаеыкиыйШэК╕ьХФыПД ъ╖╕ ьШБэЦеьЭД ы░ЫьХД ыНФ ьжЭъ░АэХа ъ▓ГьЬ╝ыбЬ ь╢ФьаХыРЬыЛд.
Table┬а3
Selected bf, bm according to Froude number

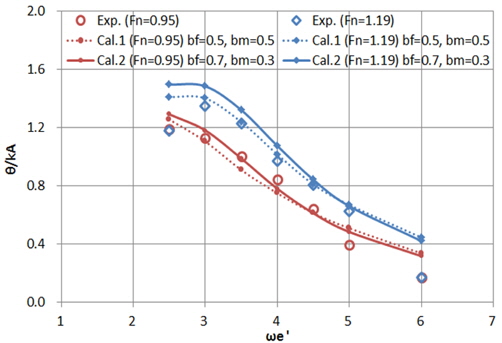
Table 3ьЭД ь░╕ъ│аэХШьЧм ы│┤ьаХъ│ДьИШ
bfые╝ 0.7,
bmьЭД 0.3ьЬ╝ыбЬ ьИШьаХэХЬ эЫД Froude ьИШ 0.95, 1.19ьЧРьДЬ ыМАьГБ эЩЬьг╝ьДаьЭШ ьг╝эММьИШы│Д ьЪ┤ыПЩьЭД ъ░Бъ░Б ъ│ДьВ░эХЬ ъ▓░ъ│╝(Cal.2)ыКФ
Figs. 8-
9ьЭШ ьЛдьДаъ│╝ ъ░ЩыЛд.
bf, bmьЭД ъ░Бъ░Б 0.5ыбЬ ыМАьЮЕэХЬ ъ│ДьВ░ ъ▓░ъ│╝(Cal.1)ыПД ьаРьДаьЬ╝ыбЬ эХиъ╗Ш эСЬъ╕░эХШьШАыЛд. ыСР ъ│ДьВ░ьЭА ьДаьаАъ▓╜ьВмъ░БьЭШ ы│АэЩФые╝ ы░ШьШБэХЬ ъ▓ГьЭ┤ыЛд. ьаХьИШ ьдС ыкиэШХьЛЬэЧШьЧР ъ╖╝ъ▒░эХШьЧм ы│┤ьаХъ│ДьИШ
bf, bmьЭД ьИШьаХэХШьШАьЭД ыХМ ьаДь▓┤ьаБьЬ╝ыбЬ эММьдС ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ые╝ ыНФ ьЮШ ь╢ФьаХэХиьЭД эЩХьЭ╕эХШьШАыЛд.
Fig.┬а8
Heave response with bf = 0.7, bm = 0.3

Fig.┬а9
Pitch response with bf = 0.7, bm = 0.3
4.4 тАШPile-upтАЩ ы│┤ьаХъ│ДьИШ ьИШьаХ
2.2ьаИьЧРьДЬ ьЪФьХ╜эХЬ ы░ФьЩА ъ░ЩьЭ┤ ьРРъ╕░эШХьГБ ыЛиый┤ьЭШ ьИШьзБ ьЮЕьИШ ьЛЬьаХьИШый┤ьЭД ъ╕░ьдАьЬ╝ыбЬ ьЮРьЬаьИШый┤ьЭ┤ ым╝ь▓┤ эСЬый┤ьЭД ыФ░ыЭ╝ ыНФ ьГБьК╣эХШьЧм ьЛдьаЬ ь╣иьИШъ╣КьЭ┤ъ░А ьжЭъ░АэХШыКФ тАШPile-up' эШДьГБьЭ┤ ы░ЬьГЭэХЬыЛд.
ZarnickьЭА
Wagner(1931)ьЭШ ьЧ░ъ╡мые╝ ь░╕ъ│аэХШьЧм pile-up ы│┤ьаХъ│ДьИШ
Cpuые╝ ╧А/2(=1.5708), ьжЙ ьЭ╝ьаХэХЬ ьГБьИШыбЬ ыМАьЮЕэХШьШАыЛд. эХШьзАызМ ьЭ┤эЫД
Zhao and Faltinsen(1993) ыУ▒ьЭА ьДаьаАъ▓╜ьВмъ░БьЭ┤ ь╗дьзИьИШыбЭ
Cpuъ░А ъ░РьЖМэХШыКФ ъ▓╜эЦеьЭД ы│┤ьЭ╕ ы░Ф ьЮИыЛд.
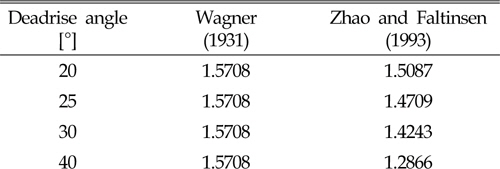
Zhao and Faltinsen(1993)ьЭД ьЭ╕ьЪйэХШьЧм ьДаьаАъ▓╜ьВмъ░Б 20~40ыПДьЧРьДЬьЭШ
Cpuые╝ эСЬыбЬ ьаХыжмэХШый┤
Table 4ьЩА ъ░ЩыЛд.
Table┬а4
Pile-up correction coefficient, Cpu
ьДаьаАъ▓╜ьВмъ░Б ы│Д pile-up ы│┤ьаХъ│ДьИШ
CpuьЭШ ы│АэЩФые╝ ъ│аыадэХШьЧм ыМАьГБ эЩЬьг╝ьДаьЭШ ьЪ┤ыПЩьЭД ъ│ДьВ░(Cal.3)эХШый┤
Figs. 10-
11ьЭШ ьЛдьДаъ│╝ ъ░ЩыЛд.
Cpuые╝ ╧А/2ыбЬ ьЭ╝ьаХэХШъ▓М ыМАьЮЕэХЬ ъ│ДьВ░ ъ▓░ъ│╝(Cal.2)ыПД ы╣Дъ╡Рые╝ ьЬДэХ┤ эХиъ╗Ш ьаРьДаьЬ╝ыбЬ эСЬъ╕░эХШьШАыЛд. ыСР ъ│ДьВ░ьЭА ьДаьаАъ▓╜ьВмъ░БьЭШ ы│АэЩФые╝ ы░ШьШБэХШъ│а, ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХ ъ│ДьИШые╝ ъ░Бъ░Б 0.7, 0.3ьЬ╝ыбЬ ыМАьЮЕэХЬ ъ▓ГьЭ┤ыЛд.
CpuьЭШ ы│АэЩФые╝ ъ│аыадэХа ъ▓╜ьЪ░ эММ ьдС ьЪ┤ыПЩ ьзДэПньЭ┤ ъ│╡ьзДьг╝эММьИШ ъ╖╝ь▓ШьЧРьДЬыКФ ьХ╜ъ░Д ьжЭъ░АэХШъ│а, ъ│аьг╝эММьИШ ьШБьЧньЧРьДЬыКФ ьХ╜ъ░Д ъ░РьЖМэХШьЧм ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ьЧР ыНФ ъ╖╝ьаСэХШыВШ, ъ╖╕ ьШБэЦеьЭА ьЮСыЛдъ│а эМРыЛиыРЬыЛд.
Fig.┬а10
Heave response with modification of тАШpile-upтАЩ correction coefficient
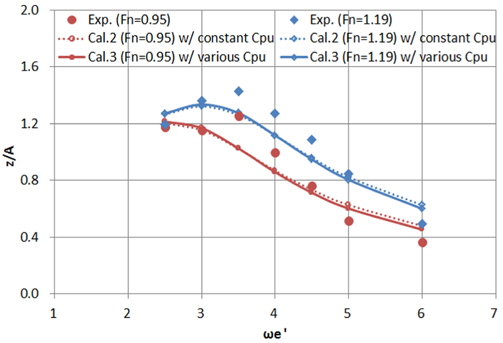
Fig.┬а11
Pitch response with modification of тАШpile-upтАЩ correction coefficient
5. ъ▓░ ыба
ы│╕ ьЧ░ъ╡мьЧРьДЬыКФ
Zarnick(1978)ьЭШ ы╣ДьДаэШХ ьКдэК╕ыж╜ ы░йы▓ХьЭД ыПДьЮЕэХШьЧм ыМАьГБьДаьЭШ ьДаьИШ ъ╖Ьь╣ЩэММ ьдС ьЪ┤ыПЩьЭД ь╢ФьаХэХШьШАыЛд. ъ│ДьВ░ ъ▓░ъ│╝ые╝ ыкиэШХьЛЬэЧШ ъ▓░ъ│╝ьЩА ы╣Дъ╡РэХШьЧм ъ▓АьжЭэХШъ│а, ъ│ДьВ░ ы░йы▓ХьЭД ьЭ╝ы╢А ъ░ЬьДаэХШьШАыЛд. ьг╝ьЪФ ъ▓░ъ│╝ые╝ ьаХыжмэХШый┤ ыЛдьЭМъ│╝ ъ░ЩыЛд.
(1) ьг╝эШХ эЩЬьг╝ьДаызМьЭД ыМАьГБьЬ╝ыбЬ эХЬ ы│╕ыЮШьЭШ ъ│ДьВ░ы▓ХьЭД ы╣Дьг╝ьГБэШХ эЩЬьг╝ьДаьЬ╝ыбЬ эЩХьЮеэХШьШАыЛд. ьДаьИШы╢АыбЬ ъ░ИьИШыбЭ ьжЭъ░АэХШыКФ ьДаьаАъ▓╜ьВмъ░БьЭД ъ│аыадэХШьЧм ъ│ДьВ░эХа ъ▓╜ьЪ░ эММ ьдС ьЧ░ьзБый┤ ьЪ┤ыПЩ ьзДэПньЭ┤ ъ░РьЖМэХиьЭД эЩХьЭ╕эХШьШАыЛд.
(2) ьаХьИШ ьдС ьЛЬэЧШ ъ▓░ъ│╝ые╝ ы░ФэГХьЬ╝ыбЬ ыМАьГБ эЩЬьг╝ьДаьЭШ ьЖНыПД ьШБьЧны│Д ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШые╝ ьИШьаХэХШьШАыЛд. ьДаьаАъ▓╜ьВмъ░БьЭШ ы│АэЩФые╝ ъ│аыадэХШъ│а ьИШьаХыРЬ ы╢Аыае ы░П ы╢АыаеыкиыйШэК╕ьХФ ы│┤ьаХъ│ДьИШые╝ ьВмьЪйэХа ъ▓╜ьЪ░ эММ ьдС ьЧ░ьзБый┤ ьЪ┤ыПЩ ьзДэПньЭД ыНФ ьаХыПД ыЖТъ▓М ь╢ФьаХэХШьШАыЛд.
(3)ьДаьаАъ▓╜ьВмъ░БьЧР ыФ░ые╕ pile-up ы│┤ьаХъ│ДьИШ ы│АэЩФые╝ ъ│ДьВ░ьЧР ы░ШьШБэХШьШАъ│а, ьЪ┤ыПЩьзДэПньЭ┤ ъ│╡ьзД ьг╝эММьИШ ъ╖╝ь▓ШьЧРьДЬыКФ ьХ╜ъ░Д ьжЭъ░А, ъ│аьг╝эММьИШьЧРьДЬыКФ ьХ╜ъ░Д ъ░РьЖМэХШыВШ ъ╖╕ ьШБэЦеьЭА ьЮСыЛд.
ь╢ФэЫДьЧР ыНФ ызОьЭА ьДаэШХьЬ╝ыбЬ ъ│ДьВ░ьЛЭьЧР ыМАэХЬ ъ▓АьжЭъ│╝ ы│┤ьЩДьЭ┤ ьЭ┤ыгиьЦ┤ьа╕ьХ╝ эХа ъ▓ГьЭ┤ыЛд. ъ│ДьВ░ ьЛаыв░ыПДые╝ ыЖТьЭ╕ эЫД, эЩЬьг╝ьДа ьЪ┤ыПЩьЭШ ьЮРьЬаыПД ыУ▒ьЭД ыНФ эЩХьЮеэХа эХДьЪФъ░А ьЮИыЛд.
ъ░РьВмьЭШ ъ╕А
ьЧ░ъ╡мыКФ 2013ыЕДыПД ъ╡░ьВ░ыМАэХЩъ╡Р ъ╡РьИШьЮеъ╕░ъ╡ньЩ╕ьЧ░ьИШъ▓╜ы╣Д, ъ╡нэЖаъ╡РэЖ╡ы╢А ъ▒┤ьДдъ╡РэЖ╡ъ╕░ьИаьзАьЧнэК╣ьД▒эЩФьВмьЧЕ ьЧ░ъ╡мъ░Ьы░ЬьВмьЧЕ(10 RTIP B01), эХ┤ьЦСьИШьВ░ы╢А ьЧ░ъ╡мьЮеы╣Д ы░П ьЭ╕эФДыЭ╝ъ╡мь╢ХьВмьЧЕьЬ╝ыбЬ ьДаы░ХэХ┤ьЦСэФМыЮЬэК╕ьЧ░ъ╡мьЖМьЧРьДЬ ьг╝ъ┤АэХШыКФ тАШыЛдыкйьаБ ьзАыКеэШХ ым┤ьЭ╕ьДа ъ╡ньВ░эЩФ ъ░Ьы░Ь(4) (PMS2950)тАЩ ъ│╝ьаЬьЭШ ьзАьЫРьЬ╝ыбЬ ьИШэЦЙыРШьЧИьК╡ыЛИыЛд.
References
Akers, R.H.. (Dynamic Analysis of Planing Hulls in Vertical Plane Proceedings of the meeting of the New England Section of the Society of Naval Architects and Marine Engineers 1999.
Fridsma, G.. (A Systematic Study of the Rough-Water Performance of Planing Crafts Stevens Institute of Technology; 1969.
Keuning, J.A.. (The Nonlinear Behaviour of Fast Monohulls in Head Waves. Ph.D. Thesis Delft University of Technology; 1994.
Kim, D.J., Rhee, K.P., Yum, D.J., Zhang, Y.. (Comparative Study on the Motion Responses for a 40ft Class Cruise Leisure Boat, Journal of the Society of Naval Architects of Korea, 2013). 50(4):240-247.


Martin, M.. (Theoretical Prediction of Motions of High-Speed Planing Boats in Waves 1976.
Shuford, S.L.. (A Theoretical and Experimental Study of Planing Surfaces Including Effects of Cross Section and Plan Form.
Van Deyzen, A.. (A Nonlinear Mathematical Model of Motions of a Planing Monohull in Head Seas Proceedings of the 6th International Conference on High Performance Marine Vehicles 2008). 187-199.
Wagner, H.. (Landing of Seaplanes 1931.
Zarnick, E.. (A Nonlinear Mathematical Model of Motions of a Planing Boat in Regular Waves 1978.
Zhao, R., Faltinsen, O.M.. (Water Entry of Two- dimensional Bodies, Journal of Fluid Mechanics, 1993). 246, 593-612.
APPENDICES
ы╢А ыбЭ
ы│╕ым╕ 2.4ьаИ ьЛЭ (11)ьЭШ ьЪ░ы│АьЧР ьЮИыКФ ьГБэХШыПЩьЪФ ьЬаь▓┤ыае тИТNcos╬╕ьЩА ьвЕыПЩьЪФ ьЬаь▓┤ыаеыкиыйШэК╕ NxcыКФ ъ░Бъ░Б ьЛЭ (A.1)ъ│╝ (A.2)ьЩА ъ░ЩьЭ┤ эСЬэШДыРЬыЛд.
ьГБъ╕░ ьЛЭ (A.1)ъ│╝ (A.2)ьЧРьДЬ Ma, Qa, IaыКФ ьЛЭ (A.3)ьЩА ъ░ЩыЛд.