


1. м„ң лЎ
мөңк·ј м „ м„ёкі„м ҒмңјлЎң н•ҙмғҒн’Қл Ҙл°ңм „лӢЁм§Җ, н•ҙм Җ мӣҗмң л°Ҹ мІңм—°к°ҖмҠӨ мғқмӮ°мқ„ мң„н•ң н•ҙм–‘ н”ҢлһңнҠё м„Өм№ҳк°Җ мҰқк°Җн•ҳл©ҙм„ң мғқмӮ°лҗң м—җл„Ҳм§Җмӣҗмқ„ мҲҳмҶЎн•ҳкё° мң„н•ң н•ҙм ҖмјҖмқҙлё”кіј н•ҙм ҖнҢҢмқҙн”„лқјмқёмқҳ м„Өм№ҳ л°Ҹ мӢңкіөмқҙ м җм°Ё мҰқк°Җн•ҳкі мһҲлӢӨ. нҠ№нһҲ н•ҙм ҖмјҖмқҙлё”мқҖ н•ҙмғҒн’Қл Ҙл°ңм „лӢЁм§ҖлЎңл¶Җн„° мғқмӮ°лҗң м—җл„Ҳм§ҖлҘј мңЎмғҒмңјлЎң мҲҳмҶЎн•ҙ мӨ„ лҝҗл§Ң м•„лӢҲлқј м„ёкі„ к°Ғкөӯмқҳ м •ліҙ м „лӢ¬ мҲҳлӢЁмңјлЎңм„ң к·ё кё°лҠҘмқ„ мҲҳн–үн•ҳкі мһҲлӢӨ. н•ҙм ҖнҢҢмқҙн”„лқјмқё м—ӯмӢң н•ҙм–‘м—җм„ң мұ„м·Ён•ң мӣҗмң мҷҖ мІңм—°к°ҖмҠӨлҘј мңЎмғҒмңјлЎң кіөкёүн•ҙмЈјлҠ” мҲҳлӢЁмңјлЎң к·ё мӨ‘мҡ”м„ұмқҙ нҒ¬лӢӨ. мңЎмғҒкіј лӢ¬лҰ¬ лӢӨм–‘н•ң н•ҙм–‘нҷҳкІҪм—җ л…ём¶ңлҗң н•ҙм ҖмјҖмқҙлё”кіј н•ҙм ҖнҢҢмқҙн”„лқјмқёмқҖ нҢҢлһ‘, мЎ°лҘҳ, н•ҙм ҖмӮ°мӮ¬нғңмҷҖ к°ҷмқҖ мһҗм—°нҷҳкІҪ мҡ”мҶҢмҷҖ м„ л°•мқҳ лӢ», м Җмқёл§қм–ҙкө¬, нҸҗк·ёл¬ј л“ұм—җ мқҳн•ң мқёмң„м Ғ мң н•ҙнҷҳкІҪ мҡ”мҶҢм—җ л…ём¶ңлҗҳм–ҙ мһҲлӢӨ. л”°лқјм„ң н•ҙм–‘м—җм„ң мғқмӮ°лҗң м „кё°м—җл„Ҳм§ҖмҷҖ мӣҗмң , к°ҖмҠӨ л“ұмқ„ м•Ҳм „н•ҳкІҢ мҡҙл°ҳн•ҳкё° мң„н•ҙ мјҖмқҙлё” л°Ҹ нҢҢмқҙн”„лқјмқёмқҙ м„Өм№ҳлҗ м§Җм—ӯмқҳ м •л°Җн•ң н•ҙм Җм§Җл°ҳ мЎ°мӮ¬лҘј мҲҳн–үн•ҳм—¬ м Ғм Ҳн•ң ліҙнҳёмӢңкіө кіөлІ•мқ„ м„ м •н•ҙм•јн•ңлӢӨ. ліҙнҳёмӢңкіө кіөлІ• мӨ‘ н•ҙм–‘нҷҳкІҪмңјлЎң мқён•ң мҶҗмғҒмқ„ л°©м§Җн•ҳкё° мң„н•ҙ мҪҳнҒ¬лҰ¬нҠё л§ӨнҠёлҰ¬мҠӨ, мһҗк°Ҳ, мӮ¬м„қ л“ұмқ„ мқҙмҡ©н•ҳм—¬ м•Ҳм •м„ұмқ„ нҷ•ліҙн•ҳкі кө¬мЎ°л¬јмқҳ мң„м№ҳлҘј мң м§ҖмӢңнӮӨлҠ” н”јліөнҳ• кіөлІ•мқҙ мһҲлӢӨ. к·ёлҹ¬лӮҳ н”јліөнҳ• кіөлІ•мқҖ мӢңкіө м•Ҳм •м„ұмқҳ л¬ём ңмҷҖ 비кІҪм ңм Ғмқё л¬ём ңк°Җ мһҲм–ҙ, нҠ№мҲҳн•ң мһҘ비лҘј мӮ¬мҡ©н•ҳм—¬ н•ҙм Җм§Җл°ҳмқ„ көҙмӮӯн•ҳкі кө¬мЎ°л¬јмқ„ л§Өм„ӨмӢңнӮӨлҠ” кіөлІ•мқҙ мқјл°ҳм ҒмңјлЎң мӮ¬мҡ©лҗңлӢӨ.
к·ё мӨ‘ лҢҖн‘ңм Ғмқё көҙмӮӯкіөлІ•мңјлЎңлҠ” мӣҢн„°м Ҝ м•”(Waterjet arm)мқ„ мқҙмҡ©н•ҳм—¬ л§Өм„Ө нҶ мӮ¬кө¬к°„м—җ лӢӨлҹүмқҳ л¬јмқ„ кі м••мңјлЎң мЈјмһ…н•ЁмңјлЎңмҚЁ, мЈјліҖ м§Җл°ҳмқҳ нҶ мӮ¬л°ҖлҸ„лҘј к°җмҶҢмӢңмјң м§Җл°ҳмқ„ м§Ғм ‘ м ңкұ°н•ҳкұ°лӮҳ м•ЎмғҒнҷ”мӢңнӮӨлҠ” мӣҢн„°м Ҝ кіөлІ•мқҙ мһҲлӢӨ. мқҙлҹ¬н•ң мӣҢн„°м Ҝ көҙмӮӯкіөлІ•мқҳ к°ңл°ң л°Ҹ м Ғмҡ©мӣҗлҰ¬м—җ лҢҖн•ң м„ н–ү м—°кө¬лҠ” нҠ№нһҲ мҲҳмӨ‘мғҒнғңм—җм„ң мӣҢн„°м Ҝ м•”мқ„ м Ғмҡ©н•ҳм—¬ лӘЁлһҳм§Җл°ҳм—җ мһ‘мҡ©н•ҳлҠ” нҳ„мғҒмқ„ мӢӨн—ҳкІ°кіјлҘј нҶөн•ҙ кІҪн—ҳм ҒмңјлЎң м ‘к·јн•ң л…јл¬ёмқҙ мЈјлҘј мқҙлЈЁкі мһҲлӢӨ. OвҖҷDonoghue et al.(2001)мқҖ лҢҖм°Ём—җ мӣҢн„°м Ҝ м•”мқ„ мҲҳм§ҒмңјлЎң кі м •мӢңнӮӨкі лҢҖм°Ёк°Җ мҲҳмЎ°лҘј л”°лқј мқҙлҸҷн• л•Ң мӣҢн„°м Ҝ л…ёмҰҗм—җм„ң 분мӮ¬лҗҳлҠ” м••л Ҙм—җ л”°лҘё м„ёкөҙмқҳ нҳ•мғҒмқ„ кІҪн—ҳмӢқмңјлЎң лӮҳнғҖлӮҙм—ҲлӢӨ. Berghe et al.(2008)кіј Su et al.(2007)мқҖ л…ёмҰҗмқҙ н•ҳлӮҳмқё мӣҢн„°м Ҝ м•”мқ„ Berghe et al.(2011)кіј Perng and Capart(2008)мқҖ л…ёмҰҗмқҙ м—¬лҹ¬ к°ңмқё мӣҢн„°м Ҝ м•”мқ„ кІҪмӮ¬м§ҖкІҢ л§ӨлӢ¬м•„ мҲҳмӨ‘ мғҒнғңм—җм„ң мқҙлҸҷн• л•Ң л°ңмғқн•ҳлҠ” лӘЁлһҳмһ…мһҗмқҳ л¶Җмң нҳ„мғҒкіј м№ЁмӢқнҳ„мғҒмқ„ 분м„қн•ҳм—¬ мқҙлЎ м ҒмңјлЎң м„ӨлӘ…н•ҳмҳҖлӢӨ. мқҙмҷҖ к°ҷмқҖ м„ н–үм—°кө¬л“ӨмқҖ мӣҢн„°м Ҝ м•”мқ„ м§Җл°ҳм—җ л§Өм„Өн•ҳм§Җ м•Ҡкі лӢЁмҲңнһҲ м§Җл°ҳмң„м—җм„ң мһ‘мҡ©н•ҳлҠ” нҳ„мғҒм—җ лҢҖн•ң мӢӨн—ҳмқ„ мҲҳн–үн•ҳмҳҖкё° л•Ңл¬ём—җ мӢӨм ң н•ҙм–‘м—җм„ң мқҙлЈЁм–ҙм§ҖлҠ” л§Өм„Ө мһ‘м—…мқҳ нҷҳкІҪмқ„ кө¬нҳ„н•ҳм§Җ лӘ»н–Ҳмңјл©° м—°кө¬ лҢҖмғҒ мһҘ비мқҳ м„ұлҠҘ л°Ҹ мһ‘м—…нҡЁмңЁмқ„ м¶”м •н• мҲҳ мһҲлҠ” мӢӨн—ҳкІ°кіјмқҳ мӢ лў°м„ұм—җлҸ„ н•ңкі„к°Җ мһҲлӢӨ.
л°ҳл©ҙ Adamson and Kolle(1996)лҠ” л‘җ к°ңмқҳ л…ёмҰҗмқ„ м§ҖлӢҢ мӣҢн„°м Ҝ м•”мқ„ лҢҖм°Ём—җ кі м •мӢңнӮӨкі , л¬јмқҙ мЎҙмһ¬н•ҳм§Җ м•ҠлҠ” м җнҶ м§Ҳмқҳ м§Җл°ҳм—җ 묻мқҖ мұ„ мқҙлҸҷмӢңнӮӨл©° мӢӨн—ҳмқ„ н•ҳм—¬ көҙмӮӯ м„ұлҠҘ н–ҘмғҒмқ„ мң„н•ң л…ёмҰҗ кө¬мЎ°лҘј м ңм•Ҳн•ҳмҳҖлӢӨ. к·ёлҹ¬лӮҳ лӢӨм–‘н•ң н•ҙм–‘мһ‘м—… нҷҳкІҪ мЎ°кұҙм—җм„ң лӢӨмҲҳмқҳ л…ёмҰҗмқ„ к°–лҠ” мӣҢн„°м Ҝ м•”мқ„ м§Җл°ҳм—җ л§Өм„Өн•ҳкі м „м§„мӢңнӮЁ мӢӨн—ҳм Ғ м—°кө¬лҠ” ліё м—°кө¬к°Җ мң мқјн•ҳлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” м ҜнҢ…м•”(Jetting arm) нғҖмһ…кіј л°ұнҢҢмқҙн”„(Back pipe) нғҖмһ…мқҳ мӣҢн„°м Ҝ көҙмӮӯкё°лҘј мӢӨм ң нҒ¬кё°мқҳ 1/6лЎң 축мҶҢ м ңмһ‘н•ҳмҳҖкі , мөңлҢҖ мһ‘м—…нҡЁмңЁмқ„ мҳҲмёЎн• мҲҳ мһҲлҠ” л…ёмҰҗм§ҒкІҪ, көҙмӮӯмҶҚлҸ„, мң лҹү, 분мӮ¬к°ҒлҸ„лҘј нҢҢлқјлҜён„°лЎң мӢӨн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. мӢӨн—ҳмқ„ нҶөн•ҙ кі„мёЎлҗң мёЎм •м№ҳл“Өмқҳ 분м„қмқ„ нҶөн•ҳм—¬ көҙмӮӯмҡ© мӣҢн„°м Ҝ мһҘ비мқҳ м„ұлҠҘл“Өмқ„ 비көҗ В· кІҖнҶ н•ҳмҳҖлӢӨ.
2. мӢӨн—ҳ л°©лІ•
2.1 мӢӨн—ҳмқ„ мң„н•ң мӣҢн„°м Ҝ м•” лӘЁнҳ•
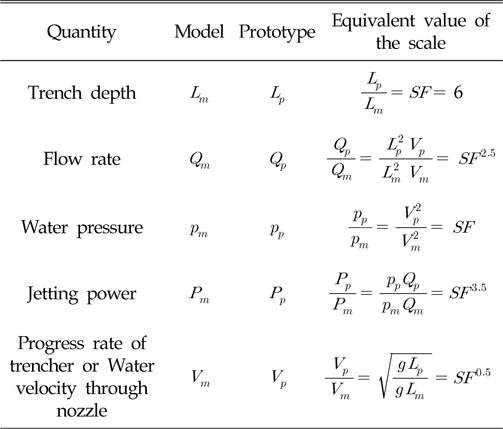
мӢӨн—ҳм—җ мӮ¬мҡ©лҗң мӣҢн„°м Ҝ м•”мқҖ мӢӨм ңнҒ¬кё°мқҳ 1/6лЎң 축мҶҢ м ңмһ‘н•ҳмҳҖмңјл©°, мӢӨм ң мһ‘м—…нҷҳкІҪмқ„ кі л Өн• мҲҳ мһҲлҠ” нҢҢлқјлҜён„°л“Өмқҳ кё°н•ҳн•ҷм Ғ 비мңЁмқҖ Table 1м—җ м •лҰ¬н•ҳмҳҖлӢӨ. мӢӨн—ҳм—җ мӮ¬мҡ©лҗҳлҠ” нҺҢн”„лҠ” көҙмӮӯмӢң мӢӨм§Ҳм ҒмңјлЎң 분мӮ¬мҲҳлҘҳлҘј л§Ңл“Өм–ҙ лӮҙлҠ” м—ӯн• лЎң мӣҢн„°м Ҝ мһҘ비мқҳ көҙмӮӯлҠҘл Ҙмқ„ мўҢмҡ°н•ҳлҠ” мӨ‘мҡ”н•ң мһҘ비мқҙлӢӨ. к·ёлҹ¬лӮҳ мӢӨм ң ROV(Remotely operated vehicle) нҠёл ҢміҗлҘј кё°мӨҖмңјлЎң Table 1кіј к°ҷмқҙ м „л Ҙмҡ©лҹүмқ„ 축мҶҢмӢңнӮ¬ кІҪмҡ° мӢӨм ң мһҘ비лҘј кө¬лҸҷмӢңнӮ¬ мҲҳ мһҲлҠ” мөңмҶҢн•ңмқҳ м „л ҘлҹүліҙлӢӨ мһ‘мқҖ к°’мқҙ мӮ°м¶ңлҗҳлҜҖлЎң лӘЁнҳ•мӢӨн—ҳмқ„ мң„н•ң нҺҢн”„лҠ” мң лҹүкіј 분мӮ¬м••л Ҙмқ„ кі л Өн•ҳм—¬ мқҙм—җ л¶Җн•©н•ҳлҠ” мһҘ비мқҳ м „л Ҙмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ(Kim, 2006).
ROVкё°л°ҳ мҲҳмӨ‘ мһ‘м—…мҡ© лЎңлҙҮмқҳ н•ң мў…лҘҳмқё ROV нҠёл ҢміҗлҠ” мЈјлЎң н•ҙм ҖмјҖмқҙлё” л°Ҹ мҶҢкө¬кІҪ нҢҢмқҙн”„лқјмқёмқҳ л§Өм„Өкіј мң м§ҖліҙмҲҳ мһ‘м—…мқ„ мҲҳн–үн•ңлӢӨ. мқјл°ҳм Ғмқё мӣҢн„°м Ҝ л°©мӢқмқҳ көҙмӮӯ мһ‘м—…мқҖ ROV н•ҳлӢЁм—җ н•ң мҢҚмқҳ мӣҢн„°м Ҝ м•”мқҙ мң м••мӢӨлҰ°лҚ”м—җ мқҳн•ҙ лӮҙл ӨмҳӨл©ҙм„ң лҶ’мқҖ мҲҳм••мқ„ мқҙмҡ©н•ҳм—¬ н•ҙм Җл©ҙмқ„ көҙмӮӯн•ҳкі мјҖмқҙлё” л°Ҹ нҢҢмқҙн”„лқјмқёмқ„ л§Өм„Өн•ңлӢӨ(Li et al., 2014). Fig. 1мқҖ м ҜнҢ…м•”мқҙ мһҘм°©лҗң м „нҳ•м Ғмқё ROV нҠёл Ңміҗмқҳ лӘЁмҠөмқҙлӢӨ.

Fig. 2лҠ” мӢӨн—ҳм—җ мӮ¬мҡ©н•ҳкё° мң„н•ҙ мӢӨм ң нҒ¬кё°мқҳ 1/6мңјлЎң 축мҶҢ м ңмһ‘лҗң л‘җ мў…лҘҳмқҳ мӣҢн„°м Ҝ көҙмӮӯкё°лҘј лӮҳнғҖлӮё кІғмқҙлӢӨ. (a)лҠ” м ҜнҢ…м•”, (b)лҠ” л°ұнҢҢмқҙн”„лЎң ліё л…јл¬ём—җм„ңлҠ” Type Iкіј Type IIлЎң лӘ…лӘ…н•ңлӢӨ. Type IмқҖ м „л©ҙл¶Җ л…ёмҰҗ(Forward-firing water jet nozzles)кіј л°ұмӣҢмӢң(Back wash)лЎң кө¬м„ұлҗңлӢӨ. м „л©ҙл¶Җ л…ёмҰҗмқҖ 진н–үл°©н–Ҙмқҳ м§Җл°ҳмқ„ көҙмӮӯн•ҳлҠ” кё°лҠҘмқ„ к°–кі , л°ұмӣҢмӢңлҠ” мӣҢн„°м Ҝ м•” м „л©ҙл¶Җ л…ёмҰҗкіј к· нҳ•мқ„ л§һ추기 мң„н•ҙ м ңмһ‘лҗҳм–ҙ көҙмӮӯлҗң м§Җл°ҳмқ„ м ңкұ°н•ҳлҠ” м—ӯн• мқ„ н•ңлӢӨ(Adamson and Kolle, 1996). лҳҗн•ң Type Iмқҳ м „л©ҙл¶Җ л…ёмҰҗмқҖ мўҢмҡ° 5В°м”© кё°мҡём–ҙ진 мұ„лЎң м ңмһ‘лҗҳм–ҙ м§Җл°ҳмқ„ көҙмӮӯн•ңлӢӨ. Type IIлҠ” м§Җл°ҳмңјлЎң н–Ҙн•ҳлҠ” л…ёмҰҗл§Ң к°Җм§Җкі мһҲмңјл©°, Type Iкіј к°ҷмқҙ л°ұмӣҢмӢң кё°лҠҘмқ„ к°–лҠ” л…ёмҰҗл“Өмқҙ м„Ө비лҗҳм§Җ м•Ҡм•„ көҙмӮӯн•ҳкі лӮң мқҙнӣ„мқҳ м•ЎмғҒнҷ”лҗң м§Җл°ҳмқ„ нӣ„л©ҙмңјлЎң л¶Ҳм–ҙмӨ„ мҲҳ м—ҶлҠ” лӢЁм җмқҙ мһҲлӢӨ. мқҙлҹ¬н•ң лӢЁм җмқ„ ліҙмҷ„н•ҳкё° мң„н•ҙ Type IліҙлӢӨ нӣЁм”¬ нҒ° кө¬кІҪмқҳ л…ёмҰҗмқ„ мӮ¬мҡ©н•ңлӢӨ.

2.2 мӢӨн—ҳмһҘ비 л°Ҹ кө¬м„ұ
мӢӨн—ҳмқҖ Fig. 3кіј к°ҷмқҙ н•ңкөӯн•ҙм–‘лҢҖн•ҷкөҗ н•ҙм–‘мӢңмҠӨн…ң м—°кө¬мӢӨ(Ocean systems engineering laboratory)м—җм„ң ліҙмң н•ҳкі мһҲлҠ” кёёмқҙ 25m, лҶ’мқҙ 1.3m, нҸӯ 1m к·ңкІ©мқҳ мҲҳмЎ°м—җм„ң мҲҳн–үн•ҳмҳҖлӢӨ. мӢӨн—ҳмһҘ비лҠ” мӢӨм ң мһ‘м—…н•ҙм—ӯмқ„ кө¬нҳ„н• мҲҳ мһҲлҠ” н•ҙм–‘кіөн•ҷ мҲҳмЎ°, көҙмӮӯмҶҚлҸ„мқҳ ліҖнҷ”лҘј мң„н•ң мҳҲмқёлҢҖм°Ё, л‘җ к°Җм§Җ нғҖмһ…мқҳ мӣҢн„°м Ҝ көҙмӮӯкё° лӘЁнҳ•, 분мӮ¬лҗҳлҠ” л¬јмқҳ мң лҹү мЎ°м Ҳмқ„ мң„н•ң нҺҢн”„, н•ҙм Җм§Җл°ҳмқҳ кө¬нҳ„мқ„ мң„н•ң нҶ мӮ¬лЎң кө¬м„ұлҗҳл©° мҲҳмЎ° лӮҙл¶Җм—җ кёёмқҙ 2.5m, лҶ’мқҙ 1m, нҸӯ 0.5mмқҳ м•ҢлЈЁлҜёлҠ„ н”„л Ҳмһ„мңјлЎң кө¬м„ұлҗң лӮҙл¶ҖмҲҳмЎ°лҘј м ңмһ‘н•ҳмҳҖлӢӨ.
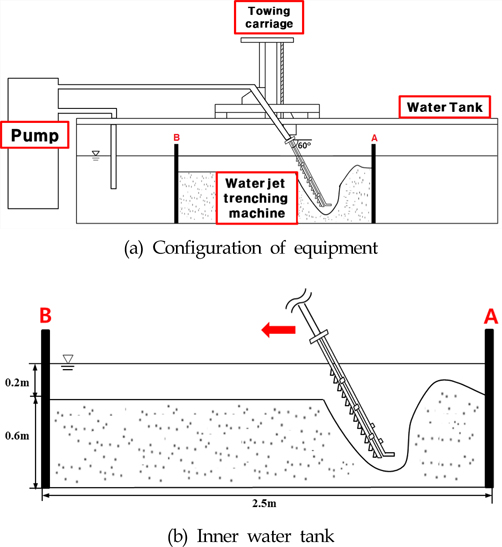
лӮҙл¶ҖмҲҳмЎ° л°”лӢҘмңјлЎңл¶Җн„° 0.6m лҶ’мқҙлЎң лӘЁлһҳмёөмқ„ нҸ¬м„Өн•ҳкі , нҸ¬м„Өлҗң лӘЁлһҳмёө мғҒл¶ҖлЎң 0.2mмқҳ л¬јмқ„ мұ„мӣ лӢӨ. мҲҳмЎ°мң„м—җ м„Өм№ҳлҗң мҳҲмқёлҢҖм°ЁлҠ” м»ҙн“Ён„°лЎң м ңм–ҙн•ҳлҠ” м „кё°лӘЁн„°м—җ мқҳн•ҙ мөңмҶҢ 0.11m/s мҶҚлҸ„м—җм„ң мөңлҢҖ 0.33m/sмқҳ мҶҚлҸ„лЎң мқҙлҸҷн•ңлӢӨ. лҳҗн•ң нҶ мӮ¬лҠ” м№ЁмҲҳмӢңк°„м—җ л”°лқј мһ…мһҗк°„мқҳ кІ°н•©л Ҙмқҙ лӢ¬лқјм§Җкё° л•Ңл¬ём—җ л§Ө мӢӨн—ҳл§ҲлӢӨ 30분мқҳ лҸҷмқјн•ң мӢңк°„ к°„кІ©мқ„ к°–кі м§Җл°ҳмқҙ м•Ҳм •лҗң нӣ„м—җ мӢӨн—ҳмқ„ 진н–үн•ҳмҳҖлӢӨ. мқҙмҷҖ к°ҷмқҙ мӣҢн„°м Ҝ л§Өм„Өкё°мқҳ мһ¬м§Ҳкіј мқҙлҸҷл°©н–Ҙ, көҙмӮӯмҶҚлҸ„, нҶ мӮ¬мқҳ нҸүк· мһ…кІҪкіј к°ҷмқҖ мӢӨн—ҳмһҘ비мқҳ нҠ№м„ұмқ„ Table 2мҷҖ к°ҷмқҙ м •лҰ¬н•ҳмҳҖлӢӨ.

2.3 мӢӨн—ҳ нҢҢлқјлҜён„°
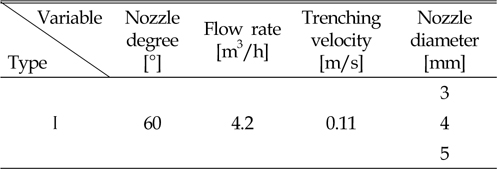
Table 3кіј к°ҷмқҙ лҸҷмқјн•ң көҙмӮӯмҶҚлҸ„ л°Ҹ 분мӮ¬мң лҹү мЎ°кұҙм—җм„ң м§ҒкІҪмқҙ лӢӨлҘё м„ё к°Җм§Җ мў…лҘҳмқҳ л…ёмҰҗлЎң мӢӨн—ҳмқ„ мҲҳн–үн•ҳм—¬ көҙмӮӯмӢ¬лҸ„к°Җ к°ҖмһҘ нҒ° кІ°кіјлҘј лӮҳнғҖлӮё м§ҒкІҪмқҳ л…ёмҰҗмқ„ Type Iмқҳ л…ёмҰҗлЎң м„ м •н•ҳмҳҖлӢӨ. мқҙмҷҖ к°ҷмқҙ м„ м •лҗң л…ёмҰҗмқ„ м Ғмҡ©н•ң Type Iмқҳ көҙмӮӯмӢ¬лҸ„лҘј кі„мёЎн•ҳкё° мң„н•ҳм—¬ Table 4мҷҖ к°ҷмқҙ көҙмӮӯмҶҚлҸ„мҷҖ 분мӮ¬мң лҹүмқ„ нҢҢлқјлҜён„°лЎң л‘җм—ҲлӢӨ. Type IIлҠ” 3.4m3/hмқҳ лҸҷмқјн•ң 분мӮ¬мң лҹүмқ„ к°Җм§Ҳл•Ң көҙмӮӯмҶҚлҸ„мҷҖ 분мӮ¬к°ҒлҸ„лҘј ліҖмҲҳлЎң л‘җм–ҙ көҙмӮӯмӢ¬лҸ„лҘј нҢҢм•…н•ҳмҳҖлӢӨ.

3. мӢӨн—ҳкІ°кіј л°Ҹ кі м°°
3.1 Type Iмқҳ көҙмӮӯм„ұлҠҘ
Fig. 4лҠ” Type Iмқҳ мӢӨн—ҳ мӨ‘ мқјл¶Җ мӢӨн—ҳмһҘл©ҙмқ„ мҙ¬мҳҒн•ң мӮ¬м§„мқҙл©°, м§ҒкІҪмқҙ лӢӨлҘё м„ё к°ңмқҳ л…ёмҰҗмқ„ м Ғмҡ©н•ҳм—¬ л°ҳліөмӢӨн—ҳмқ„ нҶөн•ҙ нҸүк· к°’мқ„ мӮ°м¶ңн•ң кІ°кіј 3mm, 4mm, 5mmмқҳ л…ёмҰҗ м§ҒкІҪм—җм„ң к°Ғк°Ғ 0.465m, 0.372m, 0.354mмқҳ нҸүк· көҙмӮӯмӢ¬лҸ„лҘј нҢҢм•…н•ҳмҳҖмңјл©° к·ё кІ°кіјлҠ” Fig. 5м—җ лӮҳнғҖлӮҙм—ҲлӢӨ. лҸҷмқјн•ң мң лҹүмЎ°кұҙм—җм„ң л…ёмҰҗм§ҒкІҪмқҙ мҰқк°Җн• мҲҳлЎқ 분мӮ¬м••л Ҙмқҙ к°җмҶҢн•ҳлҜҖлЎң көҙмӮӯнҡЁмңЁмқ„ к·№лҢҖнҷ”н• мҲҳ мһҲлҠ” 3mmмқҳ л…ёмҰҗмқ„ мөңм Ғ л…ёмҰҗ м§ҒкІҪмңјлЎң кІ°м •н•ҳмҳҖлӢӨ.
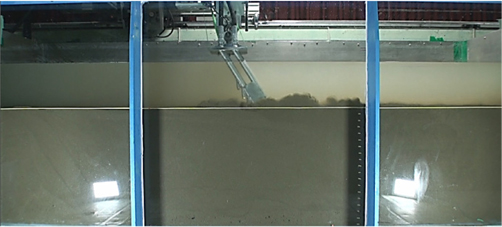

Fig. 6м—җм„ң Type Iмқҳ мөңлҢҖ көҙмӮӯмӢ¬лҸ„лҠ” 4.2m3/hмқҳ мң лҹүкіј 0.11m/sмқҳ көҙмӮӯмҶҚлҸ„м—җм„ң кі„мёЎлҗҳм—Ҳкі , 3.0m3/h мҷҖ 3.4m3/h мң лҹүм—җ лҢҖн•ҙ 0.11m/s ліҙлӢӨ л№ лҘё көҙмӮӯмҶҚлҸ„лҘј к°–лҠ” мӢӨн—ҳ мЎ°кұҙм—җм„ңлҠ” мӢ лў°м„ұ мһҲлҠ” көҙмӮӯмӢ¬лҸ„мқҳ кі„мёЎм—җ м–ҙл ӨмӣҖмқҙ мһҲм—ҲлӢӨ. л§Ҳм°¬к°Җм§ҖлЎң 3.8m3/hмқҳ мң лҹүмқ„ к°Җм§Җкі 0.33m/sмқҳ көҙмӮӯмҶҚлҸ„лҘј к°Җм§ҖкІҢ лҗ кІҪмҡ° көҙмӮӯн•ҳкё°м—җлҠ” л¶ҖмЎұн•ң мң лҹүмқ„ к°Җм§Җкі мһҲмңјлҜҖлЎң көҙмӮӯмӢ¬лҸ„лҘј нҢҢм•…н•ҳкё° м–ҙл Өмӣ лӢӨ.

л”°лқјм„ң көҙмӮӯмӢ¬лҸ„лҠ” мң мһ…лҗҳлҠ” мң лҹүмқҙ мһ‘мқ„мҲҳлЎқ, көҙмӮӯмҶҚлҸ„к°Җ л№ лҘјмҲҳлЎқ көҙмӮӯмӢ¬лҸ„лҠ” м–•кІҢ мёЎм •лҗҳм—Ҳмңјл©° мӢӨм ңмһ‘м—… н•ҙм—ӯм—җм„ң н•„мҡ”лЎң н•ҳлҠ” мқјм • мҲҳмӨҖмқҳ көҙмӮӯмӢ¬лҸ„лҘј нҷ•ліҙн•ҳкё° мң„н•ҙм„ңлҠ” мөңмҶҢ 3.0m3/h мқҙмғҒмқҳ мң лҹүкіј 0.11m/s мқҙмғҒмқҳ көҙмӮӯмҶҚлҸ„к°Җ н•„мҡ”н•ң кІғмқ„ нҢҢм•…н•ҳмҳҖлӢӨ.
3.2 Type IIмқҳ көҙмӮӯм„ұлҠҘ
Fig. 7мқҖ Type IIмқҳ мӢӨн—ҳ мӨ‘ мқјл¶Җ мӢӨн—ҳмһҘл©ҙмқ„ ліҙм—¬мЈјкі мһҲлӢӨ. Type IIлҠ” 3.0m3/hмқҳ мң лҹүмЎ°кұҙм—җм„ң көҙмӮӯн•ҳл©° м „м§„н•ҳкё°м—җлҠ” мң лҹүмқҙ л¶ҖмЎұн•ң кІғмңјлЎң нҢҗлӢЁлҗҳл©°, 3.8m3/h мқҙмғҒмқҳ мң лҹүм—җм„ңлҠ” м§Җл°ҳкөҗлһҖмңјлЎң кі„мёЎлҗң көҙмӮӯмӢ¬лҸ„мқҳ мӢ лў°м„ұмқҙ л¶ҖмЎұн•ҳм—¬ 분м„қм—җм„ң м ңмҷён•ҳмҳҖлӢӨ.

Fig. 8мқҖ Table 4м—җм„ң лӮҳнғҖлӮё Type IIмқҳ л…ёмҰҗк°ҒлҸ„мҷҖ көҙмӮӯмҶҚлҸ„мқҳ ліҖнҷ”м—җ л”°лҘё көҙмӮӯмӢ¬лҸ„лҘј лӮҳнғҖлӮё к·ёлһҳн”„мқҙлӢӨ. к·ё кІ°кіј 75В°мқҳ л…ёмҰҗк°ҒлҸ„лҘј к°–кі 0.11m/s, 0.22m/s, 0.33m/sмқҳ көҙмӮӯмҶҚлҸ„мқҳ мЎ°кұҙм—җм„ңлҠ” к°Ғк°Ғ 0.455m, 0.351m, 0.321mмқҳ көҙмӮӯ мӢ¬лҸ„к°Җ кі„мёЎлҗҳм—ҲлӢӨ. л°ҳл©ҙ 60В°мқҳ л…ёмҰҗк°ҒлҸ„лҘј к°–лҠ” кІҪмҡ° 0.11m/sмқҳ көҙмӮӯмҶҚлҸ„м—җм„ң 0.389mмқҳ көҙмӮӯмӢ¬лҸ„к°Җ кі„мёЎлҗҳм—Ҳм§Җл§Ң, 0.11m/sмқҳ көҙмӮӯмҶҚлҸ„ліҙлӢӨ л№ лҘё мҶҚлҸ„м—җм„ңлҠ” кіөн•ҷм ҒмңјлЎң мң мқҳлҜён•ң көҙмӮӯмӢ¬лҸ„лҘј мёЎм •н•ҳлҠ”лҚ° м–ҙл ӨмӣҖмқҙ мһҲм—ҲлӢӨ.

4. кІ° лЎ
ліё м—°кө¬лҠ” н•ҙм ҖмјҖмқҙлё”кіј н•ҙм ҖнҢҢмқҙн”„лқјмқёмқҳ л§Өм„ӨмӢңкіөм—җ мһҲм–ҙ ROV нҠёл Ңміҗм—җ мһҘм°©лҗҳлҠ” л‘җ мў…лҘҳмқҳ мӣҢн„°м Ҝ көҙмӮӯкё°мқҳ көҙмӮӯм„ұлҠҘмқ„ нҢҢм•…н•ҳкё° мң„н•ҙ лӘЁнҳ•мӢӨн—ҳмқ„ мҲҳн–үн•ҳмҳҖмңјл©° кІ°кіјлҠ” лӢӨмқҢкіј к°ҷлӢӨ.
(1) л…ёмҰҗ м§ҒкІҪмқҳ ліҖнҷ”м—җ л”°лҘё көҙмӮӯмӢ¬лҸ„лҠ” м§ҒкІҪмқҙ 3mmмқј л•Ң мөңлҢҖ көҙмӮӯмӢ¬лҸ„лҘј лӮҳнғҖлӮҙм—Ҳкі л¶„мӮ¬м••л Ҙмқҙ лҶ’мқ„мҲҳлЎқ көҙмӮӯнҡЁмңЁмқҙ мҰқк°Җн•ҳлҠ” м–‘мғҒмқ„ ліҙмҳҖлӢӨ.
(2) Type Iмқҳ кІҪмҡ° мӢӨм ң мһ‘м—…мӢң мҡ”кө¬лҗҳлҠ” көҙмӮӯмӢ¬лҸ„лҘј нҷ•ліҙн•ҳкё° мң„н•ҙм„ңлҠ” мөңмҶҢ 3.0m3/h мқҙмғҒмқҳ мң лҹүкіј 0.11m/s мқҙмғҒмқҳ көҙмӮӯмҶҚлҸ„к°Җ н•„мҡ”н•ң кІғмңјлЎң нҢҢм•…н•ҳмҳҖлӢӨ.
(3) Type IIлҠ” н•ҙм Җм§Җл©ҙм—җ лҢҖн•ң л…ёмҰҗк°ҒлҸ„к°Җ мһ‘мқ„мҲҳлЎқ, м „м§„ мҶҚлҸ„к°Җ л№ лҘјмҲҳлЎқ көҙмӮӯм„ұлҠҘмқҙ м Җн•ҳлҗҳм–ҙ мһ‘м—…нҡЁмңЁмқҙ лӮ®м•„м§ҖлҠ” кІғмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. нҠ№нһҲ н•ҙм Җм§Җл©ҙм—җ лҢҖн•ң л…ёмҰҗмқҳ к°ҒлҸ„к°Җ 60В°мқј кІҪмҡ°, 0.11m/sмқҙмғҒмқҳ мҶҚлҸ„м—җм„ң кі„мёЎмқҙ м–ҙл Өмӣ лҚҳ көҙмӮӯмӢ¬лҸ„лҠ” кіөн•ҷм Ғ мӢ лў°м„ұ нҷ•ліҙлҘј мң„н•ҳм—¬ 추к°Җ мӢӨн—ҳмқҙ н•„мҡ”н•ң кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
(4) н–Ҙнӣ„, ліё мӢӨн—ҳкІ°кіјлҘј л°”нғ•мңјлЎң мҲҳм№ҳ мӢң뮬л Ҳмқҙм…ҳ кІҖмҰқмқ„ нҶөн•ҙ мӢӨн—ҳкІ°кіјмқҳ мӢ лў°м„ұмқ„ нҷ•ліҙн•ҳкі лӮҳм•„к°Җ н•ҙм Җм§Җл°ҳ мӣҢн„°м Ҝ көҙмӮӯмһҘ비мқҳ кё°ліём„Өкі„м—җ м°ёкі мһҗлЈҢлЎң нҷңмҡ©лҗ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.




