VPMM 시험을 통한 무인 수중 글라이더 모형의 동유체력 계수 추정에 관한 연구
Experimental Study on Hydrodynamic Coefficients of Autonomous Underwater Glider Using Vertical Planar Motion Mechanism Test
Article information
Trans Abstract
A vertical planar motion mechanism(VPMM) test was used to increase the prediction accuracy for the maneuverability of an underwater glider model. To improve the accuracy of the linear hydrodynamic coefficients, the analysis techniques of a pure heave test and pure pitch test were developed and confirmed. In this study, the added mass and damping coefficient were measured using a VPMM test. The VPMM equipment provided pure heaving and pitching motions to the underwater glider model and acquired the forces and moments using load cells. As a result, the hydrodynamic coefficients of the underwater glider could be acquired after a Fourier analysis of the forces and moments. Finally, a motion control simulation was performed for the glider control system, and the results are presented.
1. 서 론
수중 글라이더는 바다 속을 다니면서 해양 생태계와 해저 지형 등을 탐색 및 정찰 할 수 있는 에너지가 적게 드는 최신장비이다. 또한 최근 국내 다수의 연구기관에서도 무인 수중 글라이더 개발을 목적으로 핵심기술 개발에 박차를 가하고 있는 상황이다. 본 논문에서는 수중 글라이더의 자율제어를 위한 조종운동방정식에 필요한 유체력 미계수들을 찾는데 목적이 있으며, 이 유체력 미계수를 추정하기 위해 VPMM(Vertical planar motion mechanism) 시험을 실시하였다. VPMM 시험은 Heave 와 Pitch 운동에 관련된 부가질량과 감쇠력 등을 함께 구하는 시험으로서 잠수 운동체와 선박 등의 설계에서 정확한 조종 성능의 추정을 위해 활용되고 있다(Lee and Kwon, 2002). 한편, 국내에서는 수상선을 대상으로 한 구속모형시험(Yun and Kim, 2012; Shin and Choi, 2011) 또는 시스템 식별법을 이용한 유체력 계수 추정에 관한 연구(Lee and Kwon, 2002; Yoon and Son, 2004) 등이 있으나, 본 논문의 수중 글라이더 모형에 대한 VPMM 시험은 매우 드문 사례이다. 따라서 본 논문에서는 수중 글라이더 모형을 속도 U로 예인하면서 순수 상하동요운동 (Pure heave motion), 순수 종동요운동(Pure pitch motion)운동을 각각 부가하였고, 이때 부가되는 힘과 모멘트를 모형의 선수⋅선미 부분에 장착된 로드셀을 이용하여 데이터를 획득하였다. 그리고 퓨리에 해석을 통한 수중 글라이드 모형의 선형 유체력 미계수들을 추정하였으며, 본 실험을 통해 추정한 유체력 계수를 이용하여 운동 제어시뮬레이션을 실시하였다.
2. 운동 방정식
2.1 좌표계와 운동방정식
수중 글라이더의 운동 기술을 위해 좌표계를 Fig. 1과 같이설정하였다(Lamb, 1945).

Right-handed coordinates system
수중 글라이더 모형의 선수⋅선미 부분에 장착된 로드셀을 이용하여 전후 Strut에 걸리는 Heave force Z1, Z2 을 획득하고, 모형 전체에 걸리는 Heave Force와 Pitch Moment는 다음 식 (1)과 식 (2)와 같이 나타낸다.


수중 글라이더에 적용되는 6 자유도 운동방정식은 REMUS (Remote Environmental Monitoring Unit) 모델(Prestero, 2001) 의 운동방정식을 채택하였으며, 본 실험의 해석에 이용된 운동방정식은 선형항만을 고려한 Heave-Pitch 연성 운동방정식을 사용하였다. 이에 관한 식은 다음과 같이 표현된다.


여기서 m은 모형의 질량, U는 모형의 합속도, Zẇ은 z축 방향의 가속도 ẇ에 관한 부가질량계수, xG는 x축 방향의 무게중심, Zw는 z축 방향의 속도 w에 관한 감쇠계수, Zq는 각속도 q에 관한 Z력,  는 각가속도
는 각가속도  에 관한 Z력, Iyy는 y축에 관한 관성모멘트,
에 관한 Z력, Iyy는 y축에 관한 관성모멘트,  는 y축에 관한 부가 관성 모멘트, Mw는 z축 방향의 속도 w에 관한 모멘트, Mẇ는 z축 방향의 가속도 ẇ에 관한 모멘트를 나타낸다, 또한 우항에서는 외부에서의 힘 ZE′, 모멘트 ME를 각각 나타낸다(Newman, 1978).
는 y축에 관한 부가 관성 모멘트, Mw는 z축 방향의 속도 w에 관한 모멘트, Mẇ는 z축 방향의 가속도 ẇ에 관한 모멘트를 나타낸다, 또한 우항에서는 외부에서의 힘 ZE′, 모멘트 ME를 각각 나타낸다(Newman, 1978).
2.2 Pure heave test
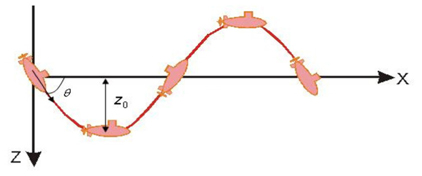
순수 상하동요 운동은 Fig. 2에 개략적으로 나타낸 바와 같이 회두운동을 하지 않고, 그 중심의 궤적이 정현파의 모양으로 변화하는 것이라 할 수 있다.

Pure heave motion


식 (5), (6)를 식 (3), (4)에 각각 대입하면,


한편 ZE , ME 를 운동의 동-위상(In-phase) 성분과 반-위상 (Out-of-phase) 성분으로 각각 분리하면 아래와 같다. 여기서 부가질량은 가속도에 관련된다. 따라서 변위와 같은 sine 함수이므로 In-phase로 나타내고, 감쇠력은 속도 w 에 관련되고, 변위와의 위상차가 90°인 cosine 함수이므로 Out-of phase로 나타낸다.


식 (9), (10)을 식 (7), (8)에 대입하여 정리하면 다음과 같다.


2.3 Pure pitch test
순수 종동요 운동은 Fig. 3에서 나타낸 바와 같이 선체 중심 궤적이 정현운동(Sinusoidal motion)의 모양으로 운동하고, 선체가 정현적인 회두 운동을 한다. 따라서 합속도 U 의 방향은 항상 선체 중심선의 방향이고 이를 Pure Pitch라 부른다.
Pure pitch motion


여기서 θ0 는 피치(Pitch) 각운동의 초기진폭을 의미한다. 식 (13), (14)를 식 (3), (4)에 대입하면,


이제 ZE , ME 을 운동의 동-위상(In-phase) 성분과 반-위상 (Out-of-phase) 성분으로 분리한다. Pitch 부가관성모멘트는 각 가속도 의 함수이고, Pitch 각 변위(θ)와 같은 Cosine 함수이므로 θ와 In-phase이고, Pitch 각속도 q는 Pitch damping Mq에 관련되며, 각 변위(θ)와 90°위상차를 가지는 sine 함수이므로 Out-of-phase로 나타난다.


식 (17), (18)을 식 (15), (16)에 대입하여 정리하면 다음과 같다.


2.4 퓨리에 해석
동적시험의 경우에 실제 로드셀에서 계측된 신호에는 모형선에 작용하는 유체동력학적 관성력과 감쇠력이 포함되어 있어 이를 분리하여 수학모형에 맞는 유체력 미계수를 구할 수 있다. 따라서 계측된 신호를 Fourier sine 또는 cosine변환을 하고 1주기까지 적분하면 다음과 같다.
ZE = Zinsin𝜔t + Zoutcos𝜔t 에서,

여기서 ZE 는 실험에서 계측된 신호이고 T는 주기이다. Zin 은 변위와 같은 위상을 갖는 관성력과 부가질량력을 포함한 힘이고 Zout 은 변위와 90°의 위상차를 갖는 감쇠력을 의미한다.
3. 장비소개 및 사용방법
3.1 VPMM 장비
Scotch yoke의 Arm 길이를 조절하여(Fig. 4의 우측 사진 ○ 부분)진폭을 조절할 수 있으며 0m ~ 0.3m 까지 진폭 조절이 가능하다. Pure heave 운동 또는 Pure pitch 운동 모두 선수⋅선미에 똑같이 원하는 진폭 값을 적용한다. Pure pitch motion의 경우, Fig. 4의 우측 사진 □부분을 이용하여 한쪽 원판을 계산된 위상각 ϵp° 만큼 돌리면, 앞⋅뒤 Strut의 움직임에는 ϵp° 만큼 위상차가 발생하게 된다. Fig. 5은 선수와 선미에 70°의 위상차를 준 모습이다.
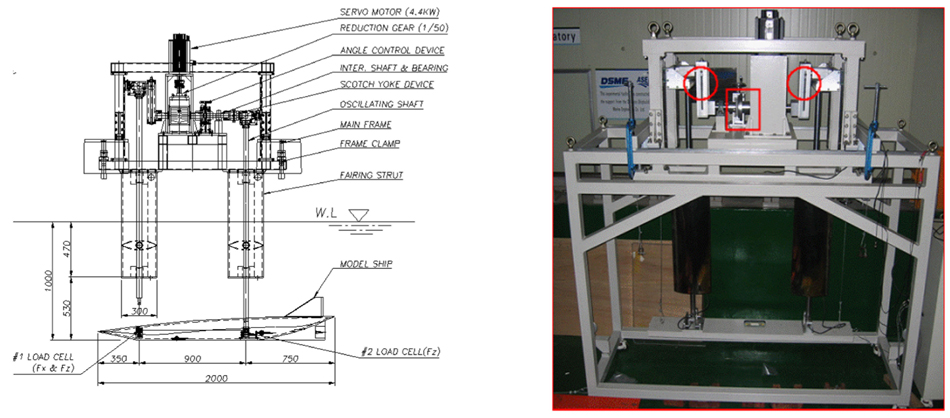
Design drawing and Picture of VPMM equipment

Phase difference between struts
위상각 ϵp를 구하는 과정은 다음과 같다.


한편, 앞뒤 Strut의 Heave 변위를 z1 , z2라 하면 전체로서의 Heave 변위 z는,



z1 , z2 가 위상각 ϵ1 , ϵ2 을 가지며 정현적으로 변화하면,


이때 선수 및 선미에서의 위상각 ϵ1 , ϵ2 및 위상차 ϵp = ϵ2 – ϵ1 는 식 (29), (30)와 같다.


여기서 L은 앞⋅뒤 Strut 사이 거리 L = l1 + l2 를 의미한다.
4. 모형시험 결과 및 해석
4.2 Pure heave test
T = T1(s), z0 = A1(m), U= U1(knot)로 설정하여 데이터를 획득해 보았다. 먼저 선수⋅선미에 걸리는 힘을 그래프로 그려보면 Fig. 7 ~ 8과 같다.
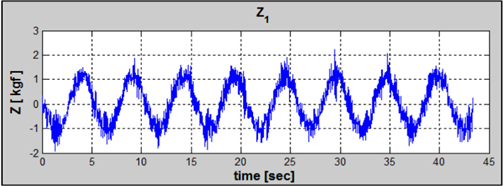
Fore heave force (Z1 )
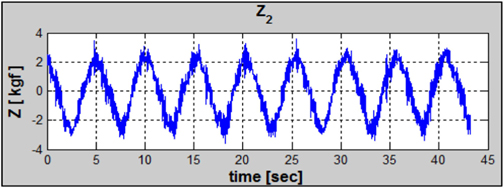
Aft heave force (Z2)
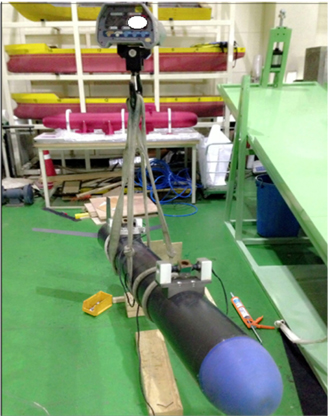
Measuring weight of the glider model
식 (1), (2)를 이용하여 모형이 받는 전체 Heave force 및 Pitch moment를 구하면 Fig. 9 ~ 10과 같다.
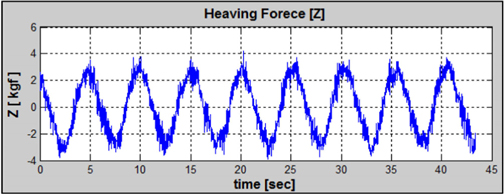
Total heave force result
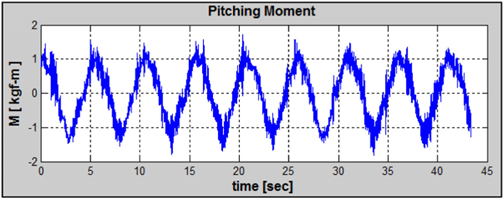
Total pitch moment result
Fig. 9 ~ 10을 보면 설정 주기 5초와 실제 운동 주기와 차이가 발생함을 알 수 있다. 따라서 푸리에 변환을 하여 정확한 주기를 확인할 수 있었다.
위의 그래프를 보면 0.2Hz 부근에서 특정 값이 대단히 높이 나타남을 알 수 있다. 이 값이 이 운동의 주기가 되며 나머지 작은 값들은 노이즈에 해당된다. 이 특정 값을 찾으면 0.195Hz 이고 이를 주기로 환산하면 5.12초이다. 앞서 본 Fig. 11 ~ 12을 식 (9), (10)과 같이 푸리에 해석을 하면 Fig. 13 ~ 14와 같다.
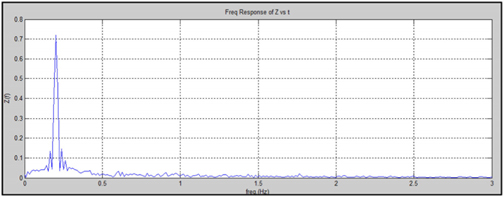
Amplitude spectrum for heave force
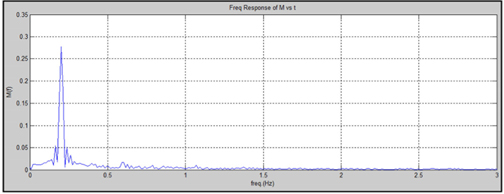
Amplitude spectrum for pitch moment

Comparison of original heave force with fourier analysis
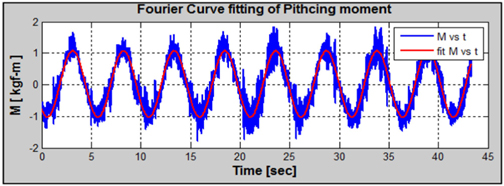
Comparison of original pitch moment with fourier analysis
적색 실선은 푸리에 분석된 선을 나타내고 있다. 이를 이용해 Fourier sine과 Fourier cosine성분을 이용하고, 유체력 계수를 구하면 Table 2와 같다. 여기서 표시된 위첨자 ′(Prime)은 각 계수들의 무차원수를 의미하고, 무차원화 방법은 미국대한조선학회(SNAME)의 Prime-I system을 채택하여 사용하였다.
Hydrodynamic force coefficients(T=T1[sec])
같은 방법으로 T2, T3, T4, T5, T6(sec)에 대해서도 해석해보면 Table 3과 같다. (T2 < T3 < T4 < T5 < T6) (Heave 방향의 부가질량력)의 경우 주기가 커질수록 부가 질량력이 감소해짐을 보였다. 반면에 Heave방향의 감쇠력 –Zẇ′ 의경우 주기가 커질수록 그 영향력이 점차 증가함을 보였다. 의 경우 m′의 약 120%가 나왔으며 이는 수중 글라이더 모형의 긴 꼬리날개에 기인한 영향으로 예측된다.
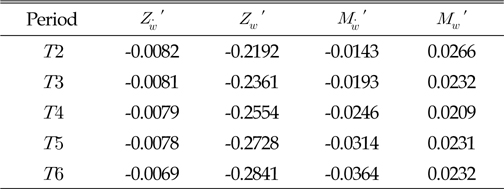
Hydrodynamic force coefficients(T=T2~T6[sec])
4.3 Pure pitch test
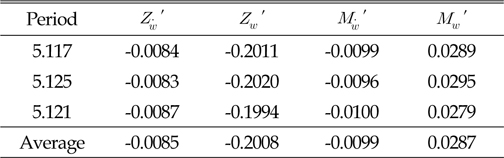
T = T2(s), z0 = A2(m), U= U2(knot), θ0 = 10°로 초기 값을 설정하여 Pure pitch motion을 설정하였다. Pure heave 해석 방법과 동일하게 데이터를 해석 및 정리하면 Table 4와 같이 정리된다.
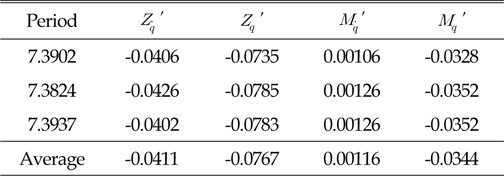
Hydrodynamic force coefficients (pitch, θ0 = 10°)
4.4 운동 제어시뮬레이션
수중 글라이더 모형은 에너지 효율을 극대화 시켜 최소의 에너지로 긴 탐사시간과 장거리의 운항이 가능한 잠수 운동체이다. 기존의 추진 장치를 이용하는 무인잠수정과는 다르게 부력조절 장치를 이용하여 추진력을 얻게 되고 질량이동 장치를 이용하여 자세제어를 하게 된다. Fig. 15의 선수부분에 있는 피스톤이 앞뒤로 움직이면서 부력을 조절하게 된다.

Comparison of original pitch moment with fourier analysis
앞서 구한 동유체력 계수들과 REMUS(Remote environmental monitoring unit) AUV(Autonomous underwater vehicle)의 계수 추정식(Prestero, 2001)에 따른 유체력 계수들을 이용하여 시뮬레이션을 실시하였다. 비선형항을 고려한 운동방정식은 다음식(31) ~ 식(36)과 같이 정의한다.






여기서, W, B는 피스톤 운동과 질량이동장치의 움직임에 따른 변화를 고려한 글라이더 모형의 총 무게와, 부력을, xG′ , xB 은 x방향의 무게중심과 부력중심 좌표를 각각 나타낸다. 시뮬레이션을 위해 MatLab 프로그램을 이용하여 PD(Proportionalderivative) 제어를 하였다. 시뮬레이션 시간은 120초 이고, 샘플링은 0.01초로 설정 하였다. 초기 조건은 수심 0m 에서 시작하였고, 음성부력 1N을 부가하였다. 속도, 피치 각변위 모두 0에서 시작한다. 목표 조건은 수심 100m 까지 하강을 한 후, 100m에서 자세를 유지하도록 설정하였다.
Fig. 16을 보면 목적에 맞게 수심 100m까지 하강을 한 후, 수심 100m에서 수심을 잘 유지하고 있는 것을 확인 할 수 있다. 그리고 Fig. 18의 x방향에 대한 속도변화를 살펴보면, 초기 Pitch 각 –30°에서 0°로 변화하면서 수심 100m지점인 80초 후 Overshoot구간이 발생하여 순간 속도가 급격히 떨어지게 되며, 다시 Pitch 각 0°를 유지하면서 순간속도가 잠시 증가한 후 점차 감소하는 현상을 볼 수가 있다. 또한 피스톤과 질량이동장치가 수중 글라이더 위치와 자세에 따라 알맞게 변화함을 Fig. 19, Fig. 20에서 확인할 수 있다. 그리고 최종적으로 시뮬레이션에 사용된 선형 유체력 미계수를 Table 5와 같이 정리할 수 있다.
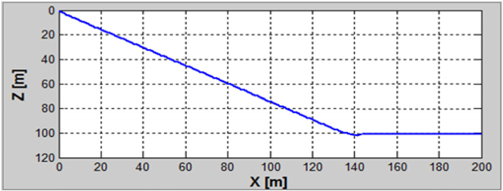
Simulation result for x-z position
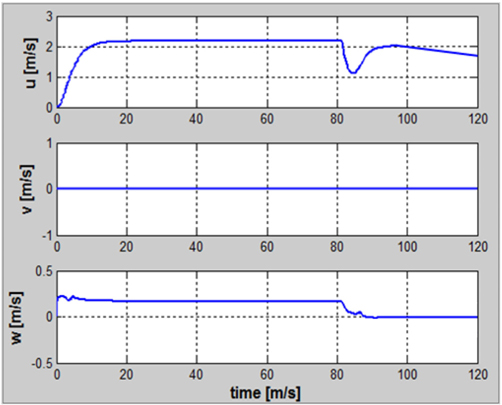
Simulation result for u, v, w with time history

Simulation result for piston position with time history
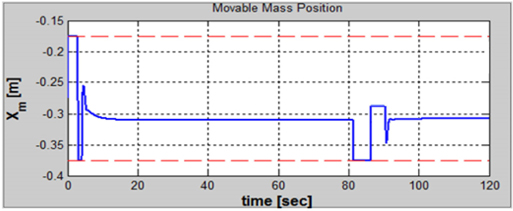
Movable mass position with time history

Hydrodynamic force coefficients (heave, pitch)
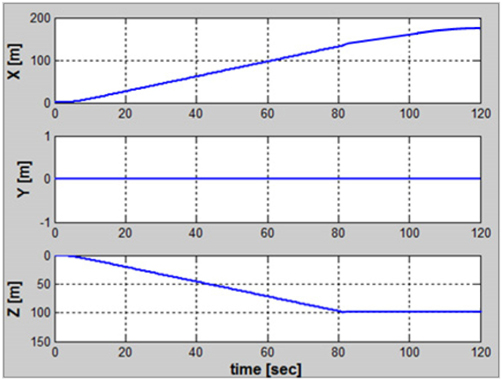
Simulation result for x, y, z positions with time history
5. 결 론
본 논문에서는 VPMM 시험을 통해 수중 글라이더 모형의 Heave-Pitch에 관련된 부가 질량력, 부가관성 모멘트, 감쇠력 및 감쇠 모멘트를 계측하였으며, 이 계측 결과로부터 Table 5와 같이 수중 글라이더의 동유체력 미계수를 얻었다.
본 VPMM 시험을 통해 구한 선형 유체력 미계수( )와 REMUS AUV의 계수 추정식을 이용하여 완성된 6 자유도 운동방정식을 이용하여 시뮬레이션을 실시하였고, 설계된 심도에서의 제어가 잘 수행되는 것을 확인할 수 있었다. 한편, 부가질량력 계수의 경우, 주기가 커질수록 계수값이 감소해 짐을 보이는 반면에 Heave방향의 감쇠력 계수의 경우, 주기가 커질수록 점차 증가함을 보였다. 그리고 부가질량력이 모형 질량의 약 120%로 나타났으며 이는 수중 글라이더 모형의 긴 꼬리날개에 기인한 영향으로 판단된다. 향후 운동성능의 향상을 위해 꼬리날개의 위치, 형상, 크기 변화 등을 실시하여 그 변화와 동유체력 미계수들과의 상호 연관성 및 운동성능의 변화 등을 연구할 예정이다.
)와 REMUS AUV의 계수 추정식을 이용하여 완성된 6 자유도 운동방정식을 이용하여 시뮬레이션을 실시하였고, 설계된 심도에서의 제어가 잘 수행되는 것을 확인할 수 있었다. 한편, 부가질량력 계수의 경우, 주기가 커질수록 계수값이 감소해 짐을 보이는 반면에 Heave방향의 감쇠력 계수의 경우, 주기가 커질수록 점차 증가함을 보였다. 그리고 부가질량력이 모형 질량의 약 120%로 나타났으며 이는 수중 글라이더 모형의 긴 꼬리날개에 기인한 영향으로 판단된다. 향후 운동성능의 향상을 위해 꼬리날개의 위치, 형상, 크기 변화 등을 실시하여 그 변화와 동유체력 미계수들과의 상호 연관성 및 운동성능의 변화 등을 연구할 예정이다.
Acknowledgements
본 연구는 방위사업청/국방과학연구소의 산학연 과제로 수행 된 연구결과 중 일부임을 밝히며, 연구비 지원에 감사드립니다.
References
Lamb, S.H., 1945. Hydrodynamics. 6th Edition. Dover Publications, 152-155.
Lamb S.H.. Hydrodynamics Dover Publications; 1945. p. 152–155. 6th Editionth ed.Lee, T.I., Kwon, S.H., 2002. A Study on Practical PMM Test Technique for Ship Maneuverability Using System Identification Method. Journal of Ocean Engineering and Technology, 16(6), 25-31.
Lee T.I., Kwon S.H.. A Study on Practical PMM Test Technique for Ship Maneuverability Using System Identification Method. Journal of Ocean Engineering and Technology 16(6)2002;:25–31.Newman, J.N., 1978. Marine Hydrodynamics. The MIT Press, Cambridge, 144-148.
Newman J.N.. Marine Hydrodynamics The MIT Press. Cambridge: 1978. p. 144–148.Prestero, T.J., 2001. Verification of a Six-degree of Freedom Simulation Model for the REMUS AUV. Master's Thesis, Massachusetts Institute of Technology/Woods Hole Oceanographic Institution, Departments of Ocean and Mechanical Engineering.
Prestero T.J.. Verification of a Six-degree of Freedom Simulation Model for the REMUS AUV. Master's Thesis. Massachusetts Institute of Technology/Woods Hole Oceanographic Institution, Departments of Ocean and Mechanical Engineering; 2001.Shin, H.K., Choi, S.H., 2011. Prediction of Maneuverability of KCS Using Captive Model Test. Journal of the Society of Naval Architects of Korea, 48(5), 465-472.
Shin H.K., Choi S.H.. Prediction of Maneuverability of KCS Using Captive Model Test. Journal of the Society of Naval Architects of Korea 48(5)2011;:465–472. 10.3744/SNAK.2011.48.5.465.Yoon, H.K., Son, N.S., 2004. Estimation of Roll Related Coefficients of a Ship by Using the System Identification Method. Journal of the Society of Naval Architects of Korea, 41(4), 53-58.
Yoon H.K., Son N.S.. Estimation of Roll Related Coefficients of a Ship by Using the System Identification Method. Journal of the Society of Naval Architects of Korea 41(4)2004;:53–58. 10.3744/SNAK.2004.41.4.053.Yun, K.H., Kim, Y.G., 2012. Study on the Maneuverability of Barge by Captive Model Test. Journal of Korean Navigation and Port Research, 36(8), 613-618.
Yun K.H., Kim Y.G.. Study on the Maneuverability of Barge by Captive Model Test. Journal of Korean Navigation and Port Research 36(8)2012;:613–618. 10.5394/KINPR.2012.36.8.613.