


1. š ŠÀ
1970Š
Š ÚŠ¯ šÇÚ, š˜ÚÇš ŠÏõ¯Š´õÇÇš šš
š šš¯š šÚ ŠÏš õ¯Š
ŠÊšÇ š¯õ瘊šÇ šŠÊ.(Brink and Chung, 1981; Chung, 1996; Herrouin et al., 1989; Amann et al., 1991; Liu and Yang, 1999; Hong and Kim, 1999; Deepak et al., 2001; Handschuh et al., 2001). š˜ÚÇš š ÚÇš šÏŠ¯š ŠÏÊš¯ Šš Ú´šš´š õ¯šÏ Š₤¡š¡Ú š
šŠÊŠÀ ښ݊šÇ šõ¡¯ ŠŠ˜¡š šÏŠ¯š šÏšÏŠ ËšÇ ŠÏÊš¯ Š₤¡š§ÚŠÊŠ Š˜¡š š š õ¯šÏŠÊ. Š¯Š¥š šÇ šÏŠ¯š šÈ¥ÚÚŠˋ¯ ŠÏõ¯Š´õÇÇŠË¥ šÝõÇÚŠ šËŠ¿ ŠŠ ŠÀŠÇš õÑÊŠ š¯´Šš¥ŠÀ Úš˜ š¯õç˜õ¯ šÏÚšÏõ° šŠÊ. õÑÊŠ š¯´Šš šËš š š šÏ ŠˋÇš šÇ Šõ¡¯ ŠŠ˜¡š š¯š§Ú šÏŠ¯šš šÑˋŠÑÚ š šÇ õ¯ŠËÚ šÈ¥Úš Ú š šš¥Šˋ¯ õÇŠýšÚ š šÏ ŠˋÇš š¥ŠÀ š¡ÚÇ Rolling, PitchingšÇ š šÇ šš š š¡ š š¡ š šÇ Š¯ š Ú šÈ¥ÚšÇ õ¯ŠËÚÇ šÏŠÊ. Úš˜ õ¯Š¯ šÏÚ šÊš¡ MineRo(Kim et al., 2006; Kim et al., 2007; Choi et al., 2006) šÙš šÇŠ˜Ú šÇš ŠÀ õÑÊŠ š¯´Šš¥ŠÀ õ¯Š¯ ŠšÇšÀŠÊ. ÚšÏŠÏ š˜ÚÇššš šÈ¥Úš š˜Š˜ Š°šŠÀ š¡ÚÇ šÇŠÀ š š¡ õý¯õ°¥ŠÀ šš š šÇŠÊ Š¥Š õý¯ŠÀ š š£õ¡¯õ¯ šÇŠ çŠÊ. Š¯Š¥š š˜Š˜ Šýš šÊÚš šÚÚš˜ õñ¡ õý¯õ°¥ŠÊŠÀŠÑÚ¯ õýšÎšÇ šÇŠÈ´šÇ š ¡š¥ ÚšÏŠÏ š˜ÚÇš šÊÚš Ú¯ Š¿šˋšÇ šŠ¿ŠŠ₤ŠÀ ښʚ š¥ŠÀ š§šÏõ¯ šŠÊ. šŠÛ˜Š šÇš
š õ¡¯Š¯š¥ŠÀ õýšÎš ÚÇš¥ŠÏ ÚŠ šÇš õ¯ šÇõýšÇŠÊ.

šŠÛ˜Š šÇš
š õ¡¯Š¯š¥ŠÀ š¯š§ šÏŠ¯š ŠÚ šÈ¥Úš¯´Šš šÝŠËÚÇš š¯õ瘊 Úš˜õ¿šÏ šÏÚŠšÇ šŠÊ(Hayasi, 1975; Kitano and Kuma, 1977; Baladi and Rohani, 1978; Bode, 1991; Murakami et al., 1992; Zhang, 1995; Kim et al., 2003; Kim et al., 2004; Kim et al., 2010).
š¯š§šÏŠ¯ šÈ¥Úš¯´Šš šÝŠËÚÇšš ŠÚ š£ÇÚ´Ú¯ šŠÛ˜Š šÇš
š Š°ÇÚç 2õ¯šÏŠÀ ŠŠ š šŠÊ. šÊš Šˆ´Š¡õ°¥ ššÈ¥ š š˜Úõý Šˆ´Š¡ŠÏÚŠ ŠÊŠ˜¥šýÇ š¯´Š Šˆ´Š¡ŠÏõ°¥ šÊš Šˆ´Š¡š õ¯Š´Ú Úš˜ ÚŠš õ¯šýÇŠÀ Šˆ´Š¡ŠÏÚŠ õ¯šýÇ š¯´Š Šˆ´Š¡ŠÏš¥ŠÀ ŠŠ š šŠÊ. õ¯šýÇ š¯´Š Šˆ´Š¡ ÚÇšš š¯´Šš õ¯ ššš š¡ŠÑš š¡ Šˆ´Š¡ŠÏ Šš š 1õ¯š õ¯šýÇŠÀ Šˆ´Š¡ŠÏÚõ¡¯š šš¿ ÚÇš šõ¯šÇ ššÈ¥ šÏÏššÏšÏŠÏ Š°çÚˋš š¡ õ¡¯õ°šËš¿ŠÊš ÚŠš õ¯šýÇš ÚÚÚŠÊ Š°ÇŠ š ÚŠ ŠˋÇšš Š°ÇšËŠšÏ šŠŠÊ. õñ¡Š˜Š ŠÊŠ˜¥šýÇ š¯´Š Šˆ´Š¡ ÚÇšš š¯´Šš õ¯ ššš š¡ŠÑš š¡ Šˆ´Š¡ŠÏš Š¯Úš¥ŠÀ õ¯ ššš ŠÚ Šš õݯŠ Ú¿šÝš šš¡ÀšÇ õ¯ŠËÚŠÊŠ š õ°¥ šÇŠ˜Ú Šš õݯŠ Ú¿šÝš ÚçÚš˜ š¡ŠÑšÊõ° š šš ššÈ¥ š šˋÚõý š˜šˋŠ š šŠÊŠ šËš šÇ šŠÊ.
š˜ÚÇš šËŠ¿š šŠÛ˜Š šÇš
š ššÇ õ¯šË šÊšÚ õýš ÚÇš šŠõ¯ šŠŠ¥ š¥ŠÏŠ Š š ÚÚõý õ¡¯õ° šËš¿š Šš õݯŠš ÚÚÚõ° ŠÑšÚŠŠš šŠÊ.
Š°¡ š¯õ瘚šŠ š Ú š¯õ瘊ʚ õý¯õ°¥ŠË¥ ÚšˋÚš˜ 4šÇ õÑÊŠ š¯´ŠšÇ š¯š§ šÏŠ¯šš šçš š š Ú šÈ¥ÚšÇ õ¯ŠËÚõý ÚŠ šÈ¥ÚŠ¯ˋŠýš ŠÊŠ˜¥šýÇ ŠšÙÚ ÚÇš õ¡¯Šýš šÇšˋÚš˜ š¯ƒõ° š ÚŠÊ. š˜õ¡¯š šçš š Ú šÈ¥ÚšÇŠ š¯š§ šÏŠ¯šš š¯´ŠšÇ Šš¥Ú šÈ¥Ú šŠ(Š˜Çõý šÊš˜ õ¡¯šÊ)ŠÀ š Ú šÈ¥Ú šš š Ú Š¯õý§šÇ Š šš šÈ¥Ú šÀ¯õÝÇš ŠÏÚŠÊ. šÀ¯õÝÇš Š¯Š¥ Šš¥Ú šÈ¥Ú šŠšš š Ú Š¯õý§šÇ Ú˜õý Š˜Š¥šÏŠ šš¡š š¯š§ šÏŠ¯š Úõý§š šš¡š¥ŠÀ š¡ÚÇ š˜ŠÎ§õ°¥ š¿´Úõ¯ Š¯šÚš˜ šÈ¥Ú Š¯ š Úš šÚËš Š₤¡š¿õ¡¯ ŠŠ˜¡šÇŠÊ. š¯š§ šÏŠ¯ššš šçš š Ú šÇŠš š¯ƒŠ ŠÊŠ õýš šÈ¥Ú š šÇš šŠ¿ŠŠ šŠšÏš õ¯šš šÇŠÀ š¡Ú šËŠ¿š Úšˋ õ¡¯õ¯š šÎŠš Š¿ŠÀÚŠ õÇõ°ŠË¥ õ¯õ¡¯ ŠŠ˜¡š šËŠ¿š ššˋÚ š šÇšˋš ŠÚ šÊšÚ šŠÈõ¯ ŠŠÊ. š¯õ瘚š š˜šˋŠ ŠÊŠ˜¥šýÇ ŠšÙÚ ÚÇšš š¯´Š ŠšÙÚ Š¯ õ瘚À¯ ŠšÙÚ ŠÝšš ŠÏšÇ ÚšˋŠõ° ššš š ŠÑ Š¯ˋŠýõ°¥ š Š šÂÚõ°ŠË¥ š˜šˋÚŠ ššˋ šÚÚ¡š´šÇ DAFUL(2012)š š˜šˋÚšŠÊ. DAFULš ŠÊšÚ ÚÇÚñš õ¯šÏõ° šš¥Šˋ¯, Ú¿Ú Š˜ÇÚ õÑÊŠ šÈ¥Ú š¯´Šš Šš õݯŠ ÚÇššÇ õ¯ŠËÚ Tracked vehicle system modulešÇ Úš˜ ŠšÇ ššÇ šÏÏš šõ¯š õÑÊŠ š¯´Šš Šˆ´Š¡ŠÏšÇ õ¯ŠËÚŠˋ¯, õÑÊŠš õÑÊŠ, õÑÊŠš šÏŠˋÇ š˜šÇš š¯šÝ ÚÇššÇ õ¯ŠËÚš˜ Š°çÚˋš š¡ ÚÇš Š¯ ŠÑššÇ õ¯ŠËÚŠÊŠ šËš šÇ šŠÊ.
2. MineRo Šˆ´Š¡
2.1 MineRoš ŠÊŠ˜¥šýÇ ŠšÙÚ Šˆ´Š¡
MineRoŠ šÂ, š¯š¡À Š õ¯š Š´š¥ Šˆ´ŠŠÀ õ瘚݊šÇ šš¥Šˋ¯ õ¯õ¯š Š´š¥ Šˆ´Šš šÈ¥Ú šËš¿, šÝšÏ šËš¿, Úš šËš¿, šÀšÑ šËš¿, š š šËš¿, š õ¡¯ š š šËš¿ ŠÝš¥ŠÀ õç˜šÝ ŠšÇšŠÊ. Š õ¯š Š´š¥Šˆ´Šš ÚŠš ÚŠ šš šÚÇ Úˋš°šÏŠÊ. õñ¡Š˜Š ÚÇš šŠš ÚËšš šÚÇ MineRoš Š°çšÀÚ õ¡¯õ°šËš¿ŠË¥ Š´šÚ Úš˜ Šˆ´Š¡ŠÏÚšŠÊ. Šˆ´Š¡ŠÏ Š MineRoš õ瘚ݚšŠ Table 1õ°¥ õ¯ŠÊ.
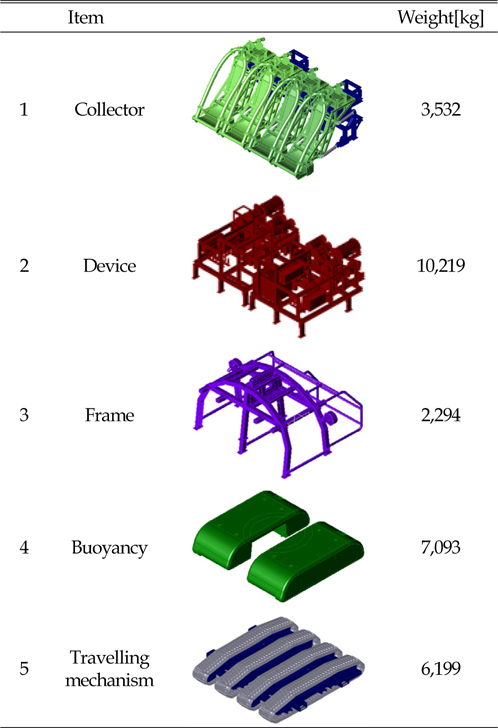
MineRoš õ°çõ¡¯ šÊ Š˜ÇõýŠ 27,336kgšÇõ° ššÊ Š˜ÇõýŠ õ°çõ¡¯ šÊ Š˜Çõýšš ŠÑŠ Ëš Š¤ õ¯š¥ŠÀ 9,381kgšÇŠÊ. Š°¡ š¯õ瘚šŠ ÚÇŠË, š šýÇš ÚÙ, ŠÑŠ Ë ŠÝš ÚÇš Úõý§šÇ šÈ¥Ú Ú¿šÝš šÚËš šÊ š šõ¡¯ ŠŠ˜¡š ÚÇš Úõý§š Šˆ´Š¡ŠÏšš š š¡Úõ° š¯š§ šÏŠ¯š ŠÚ šÈ¥Ú Ú¿šÝŠÏš õ° Š ÊÚõ° MineRoš Š˜ÇõýŠ õ°çõ¡¯ šÊ Š˜Çõý 27,336kgŠÀ õý¯š Úš˜ Šˆ´Š¡ŠÏ ÚšŠÊ.
MineRoš šÈ¥Úš š Ú šÇŠš Ú¯ šÚËš Š₤¡š¿Š õ¡¯õ° šËš¿Š šÈ¥Ú šËš¿šÇŠ₤ŠÀ šÈ¥Ú šËš¿ŠË¥ š š¡Ú õ¡¯õ°, š š, š õ¡¯ šËš¿ ŠÊš ššÏššÇ šŠ õ¯šýÇŠÀ õý¯š Úõ° šÈ¥Ú šËš¿ŠÏ ŠÊŠ˜¥šýÇ Šˆ´Š¡ŠÏš Úš˜ š¯š§ šÏŠ¯š ŠÚ š Ú šÇŠš ŠÑšÚš˜ ÚÇš šõ¯õ°¥ ÚÇšš Ú´š´š Ú´õ°¥š š¥ŠÀ ÚšŠÊ.
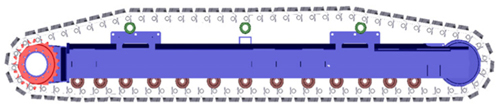
šÈ¥Ú šËš¿ Šˆ´Š¡š Fig. 2šýŠ¥ Chained systemš¥ŠÀ õ瘚݊šÇ šõ° Chained systemš Chained segments, Tracked system, Sprocketš¥ŠÀ õ瘚݊ŠÊ. õ¯õ¯š Chained segmentŠÊš Bushing force(DAFUL, 2012)ŠÀ š¯õý¯ŠšÇ šŠÊ.
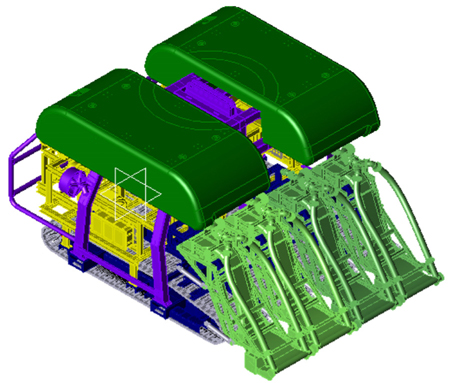
š¯õ瘊˥ šÚÇ õ¯Š¯Š MineRo Šˆ´Š¡š Fig. 3õ°¥ õ¯ŠÊ.
2.2 š¯š§ šÏŠ¯ Šˆ´Š¡
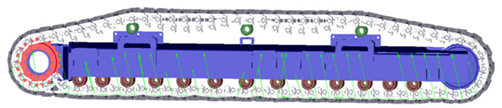
š¯š§ šÏŠ¯õ°¥ š¯´Šš š šÇš Tracked linkš Ground š˜šÇš Vector force(DAFUL, 2012) ššŠË¥ šÇšˋÚš˜ Šˆ´Š¡ŠÏ ÚšŠÊ. š¯š§ šÏŠ¯ Šˆ´Š¡õ°¥ õÑÊŠ š¯´Šš ššÏšš šÚÇ õý¯š Š šÏŠ¯ Š¯Š¯Š ËšÇ Vector forceŠË¥ tracked linkŠÊŠÀ š šˋšÇ ŠŠÊ.
š¯š§ šÏŠ¯š šÏŠ¯ Š¯Š¯Š Ëš ššÏšŠ Ë, š Š´šŠ Ë, ŠÊšÏš ÚÙš¥ŠÀ ŠŠ š šŠÊ. ššÏšŠ Ëõ°¥ š Š´šŠ Ëš ŠÚ Š˜ÇÚõÑÊŠš šÈ¥Ú š¯´Šš Šš ÚÇš Š¯ˋŠýš õ°¥õݯ š¯õç˜õ¯ šÏÚŠ Š¯ šš¥Šˋ¯(Kim et al., 2003) š (1)š ššÏšŠ Ë, š (2)Š š Š´šŠ Ë Šˆ´Š¡šÇŠÊ. Š°¡ š¯õ瘚šŠ šÇŠË¥ õ¡¯Š¯š¥ŠÀ õÑÊŠ š¯´Šš šÏŠ¯ š¿´Úš šÚ ŠÊšÏš ÚÙŠ Ëš šÑõ¯Úš˜ šÏŠ¯ Š¯Š¯Š Ëš š˜õç˜šÝ ÚšŠÊ.(Wong, 2001) ŠÊšÏš ÚÙŠ Ëš š (3)õ°¥ õ¯šÇ ÚÚÚŠÊ.

š˜õ¡¯š p*Š šÇõ¡¯ šŠ Ë, isŠ š š š¿´ÚŠ, K1, K2Š šŠ Ë-š¿´Ú šõÇ õ°šŠË¥ õ¯õ¯ ŠÚŠ¡ŠÊ.

š˜õ¡¯š TmŠ šçŠš Š´šŠ Ë, EŠ Š₤¥õ¯Š, kwŠ šçŠš Š´šŠ Ëššš š Š´ Š°š, sŠ š Š´Š°šŠË¥ õ¯õ¯ ŠÚŠ¡ŠÊ.

š˜õ¡¯š Ks1 = K1/p*, Ks2 = K2/p* ŠË¥ õ¯õ¯ ŠÚŠ¡ŠÊ.
š šŠÊš ÚçÚÇ õ°š¯Š Ú ššŠÊš š (4)ŠË¥ ÚçÚÇ š¥Š¯ šÂÚõ°š Úš¥ŠÀ Š°ÚŠšÇ Fig. 4šýŠ¥ õ¯õ¯š Tracked linkŠÀ š šˋŠŠÊ.

š˜õ¡¯š ux , uy , un Š Š¯ˋÚË ŠýÀÚ¯, fs = ü ã A , fs = p ã A , fR = öˋ ã A/2L, AŠ Tracked linkš Š´ŠˋÇš , Lš Tracked linkš šÚŠ¯ˋÚË õ¡¡šÇ ŠÚŠ¡ŠÊ.
2.3 šÏŠ¯¯ Š¯ˋš š
4šÇ õÑÊŠ š¯´Šõ°¥ õ¯š šÏŠšÇ šŠš š¥ŠÀ šõ° šš Šõ¯ ŠÏš Šˆ´Š¡š õý§š¯ ÚÇš šŠ ÇšÝõ°¥ ŠÊŠ˜¥šýÇ ŠšÙÚ ÚÇš šõ¯š Š´šÑÚõ¡¯ šÚÇ ššš šš¿ Š¯ˋŠý(Implicit numerical method)š š˜šˋÚŠÊ.
MineRoš ŠšÙÚ ÚÇšš šÚ šÇŠŠ¯ˋš šš š (5)š õ¯ŠÊ.

š˜õ¡¯š Mš šÏŠÚŠ ˜, qŠ š¥Š¯ šÂÚ, fcŠ šÏŠ¯ Š¯Š¯Š Ë, ffŠ Chained systemš š šˋŠ Ú, fdŠ š
Š Ë šŠš šÚ š¥Š¯Ú Ú,  ö£Š õ瘚Š Ë, ö£Š Š¥õñ¡ŠšÏ š¿šŠË¥ ŠÚŠ¡ŠÊ.
ö£Š õ瘚Š Ë, ö£Š Š¥õñ¡ŠšÏ š¿šŠË¥ ŠÚŠ¡ŠÊ.
ö£Š õ瘚Š Ë, ö£Š Š¥õñ¡ŠšÏ š¿šŠË¥ ŠÚŠ¡ŠÊ.õ瘚Š Ëš õ°š¯Úõ¡¯ šÚ õ瘚 šÀ¯õÝÇ öΊ ŠÊšõ°¥ õ¯šÇ š šŠŠÊ.

š (5)š (6) õñ¡ŠÎ˜õ° šš¿š šŠš ŠÚ šš¿ š ŠÑš Iq, Iv ŠË¥ šÇšˋÚš˜ ŠÊŠ˜¥šýÇ ŠšÙÚ ššÊÚ
š šÏŠ¯¯ Š¯ˋš šš š (7)õ°¥ õ¯šÇ š šÚŠÊ.
š˜õ¡¯š ššš šõ¯š ŠÚÇ ÚšÇš¥Ú Š₤¡šÏš  õ°¥ õ¯šÇ š¡ š šŠÊ.
õ°¥ õ¯šÇ š¡ š šŠÊ.
õ°¥ õ¯šÇ š¡ š šŠÊ.š (7)š š¥Š¯š š¥ŠÀ š (8)õ°¥ š (9)õ°¥ õ¯šÇ Newtonãýs methodŠË¥ šÇšˋÚš˜ Ú š šŠÊ.(Haug, 1989)


š˜õ¡¯š HÞ Š šÏŠ¯¯Š¯ˋš šš šš§Š¿š ÚŠ ˜, ššš šõ¯š ŠÚ Š₤¡šÏš Þš ÚÇŠ š (8), (9)ŠË¥ Š¯Š°çÚÇš õ°š¯ ÚŠÊ. šÇ Š šŠ ÇšÀ¯õÝÇš Š₤¡šÏš Þš Š°ÚŠšÇ š ÚÇšÏ õ°çš¯´ šÇŠÇŠÀ ÚŠÊ.
3. MINEROš š Ú šÈ¥Ú
3.1 š Ú šÈ¥Ú šÀ¯õÝÇ Š¯ ÚÇš šÀ¯õÝÇ
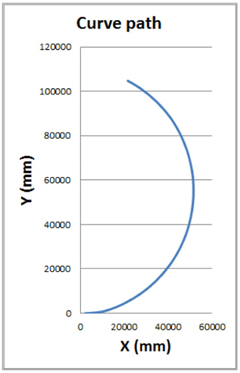
4šÇ õÑÊŠš šÈ¥Úš õÑÊŠ ÚŠÚŠõ¯ Š°ŠŠÀ õ瘊šÇ ŠŠ₤ŠÀ õÑÊŠŠÏŠÊ šŠõ¯ ššÇÚŠÊ. 4šÇ õÑÊŠ š¯´Šš šçš š Ú Š¯ˋŠýš š¯ƒõ¡¯šÚÇš 3õ¯šÏ šÀ¯õÝÇš šŠ ÚŠÀÚš¥õ°¥ 2õ¯šÏ šÀ¯õÝÇš SRŠÀ ÚÇš šÀ¯õÝÇš õý¯š ÚšŠÊ. šŠ ÚŠÀÚš¥šÇŠ õÑÊŠŠÏŠÊš šŠŠË¥ õ¯Úš¥ŠÀ ŠÚŠ¡ õýšÇõ° Fig. 5š õ¯ŠÊ. SRš õÑÊŠ š¯´Šš šÂš¡À Šˆ´Šõ°¥ š¯š¡À Šˆ´Šš šŠŠ¿ŠË¥ ŠÚŠÇŠˋ¯ Fig. 6šš VR/VLšÇ SRšÇŠÊ.

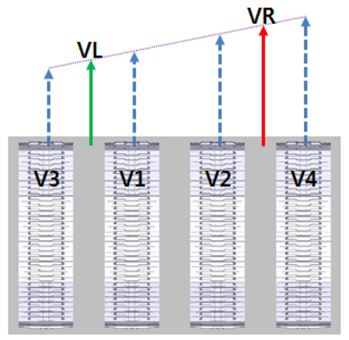
Š°¡ š¯õ瘚š MineRoš VR Š 500mm/s šÇŠˋ¯ SRš 1.5, 2.0š¥ŠÀ Úš˜ õ¯ Ú¡Šš šÈ¥Ú šŠŠË¥ õý¯š ÚšŠÊ. õñ¡ŠÎ˜õ° Ú¡Šš šÈ¥Úš õ¯ŠËš¥ ÚŠ Sprocketš Úš šŠŠË¥ š (10)š ÚçÚÇ õ°š¯Úš˜ ÚÇš Šˆ´Š¡š š šˋÚšŠÊ.

š˜õ¡¯š ÞiŠ iŠýšÏ¡ Sprocketš Úš šŠ, ViŠ iŠýšÏ¡ Ú¡Š šŠ, Rš Sprocket Š¯šÏŠÎš ŠÚŠ¡ŠÊ.
4šÇ õÑÊŠ š¯´Š Sprocketš Š¯šÏŠÎš 224.5mm, Ú¡Šš Š°šÏ šŠš Sprocket Úš šŠŠ Table 2, 3õ°¥ õ¯ŠÊ.


š¯š§ šÏŠ¯š Ú š Ú¿šÝš Table 4š õ¯ŠÊ.

3.2 šÈ¥Ú ÚÇš õý¯õ°¥
š ÚÚ ŠÑšš šÚÇšŠ Š šÊŠ šõ¯š šÈ¥Ú šŠÛ˜Š šÇš
š Š¯Úš¥ŠÀ ŠÑšÚÇš¥ ÚšÏŠÏ ŠÊŠ˜¥šýÇ ŠšÙÚš Ú¿šÝš šŠ ÇŠ š ÚÚÇŠË¥ šÈ¥Š Šš šÊŠ ÚÇš šõ¯šÇŠ¥Š Š´š š šÚÇ õñ¡ŠÎ˜ÚšÏ Šˆ£ÚšŠÊ. MineRoš š Ú šÈ¥Úš ÚŠ¿šÝš šÚÇ SR = 1.5, Velocity profile = CASE Iš šÀ¯õÝÇš¥ŠÀ 500sec š Ú šÈ¥Úš šÚÚšõ° Fig. 7šýŠ¥ šÑˋŠÑÚ š Ú šÈ¥Úš õý¯õ°¥ŠË¥ š£šŠÊ. šÇŠË¥ õ¡¯Š¯š¥ŠÀ Ú šÀ¯õÝÇŠÊš 100sec š Ú šÈ¥Úš šÚÚšõ¡¯ ŠŠ˜¡š Š°¡ š¯õ瘚 õý¯õ°¥ŠÊšÇ š Ú šÈ¥Úš Ú¿šÝ õý¯õ°¥šš Úš šš¥šÊŠÊ.
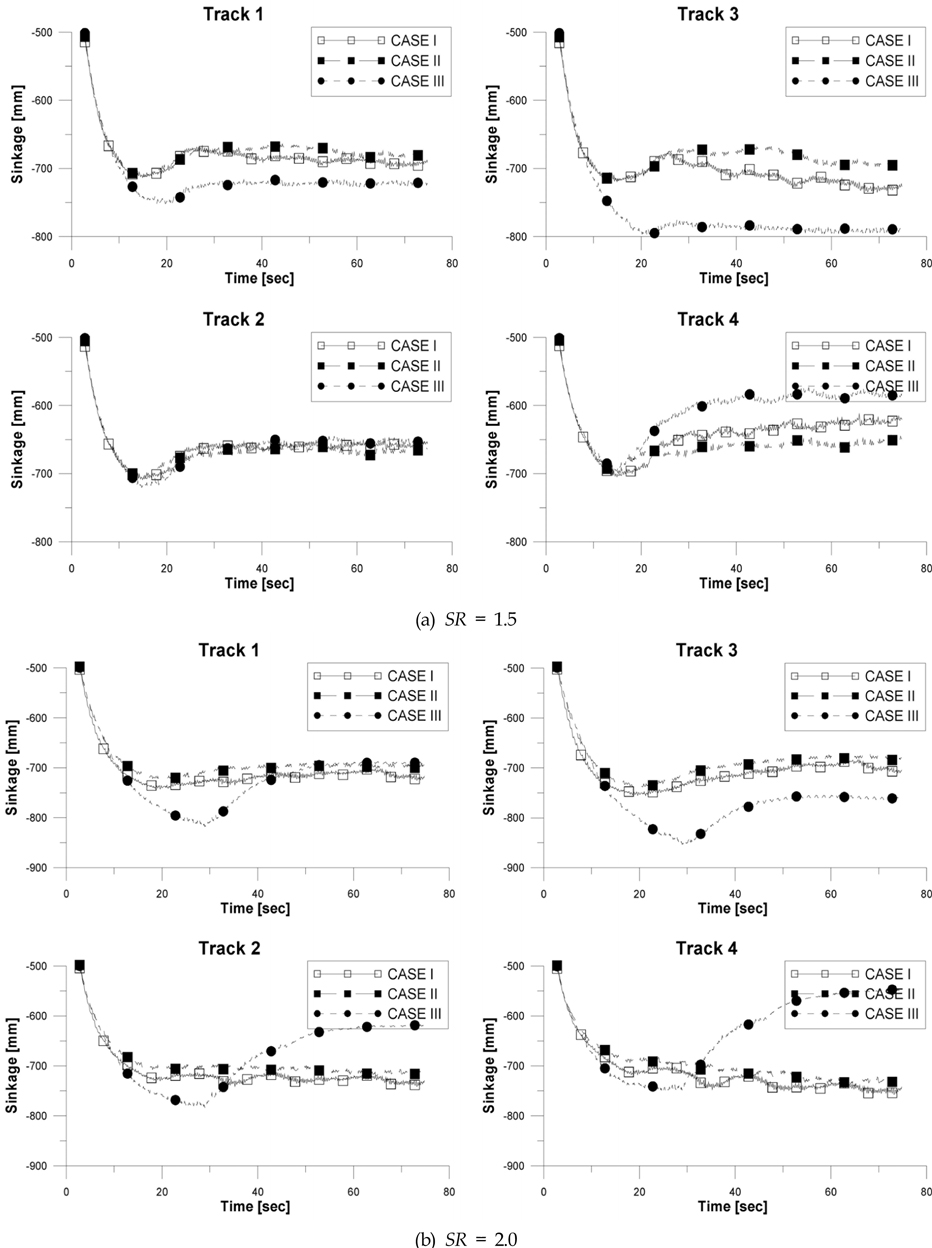
šŠ ÚŠÀÚš¥õ°¥ SRš Š¯ŠË¡ š Ú šÈ¥Ú õý¯õ°¥Š Fig. 8õ°¥ õ¯ŠÊ.



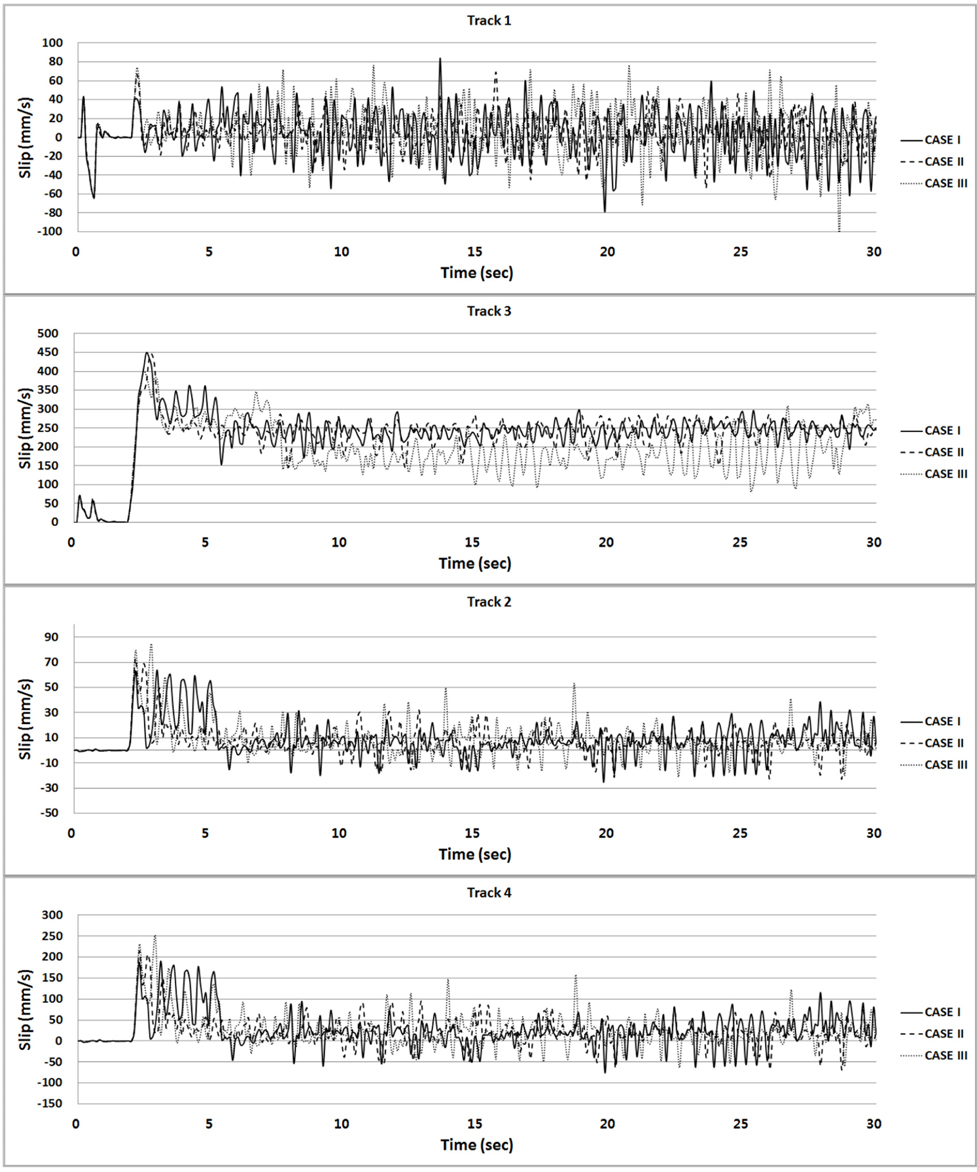
SRšÇ 1.5š¡ õý§š¯ CASE IIIš š Ú šÝŠËšÇ õ¯šË šÂšÏŠÏ 2.0š¡ õý§š¯ CASE IIš š Ú šÝŠËšÇ Š šÂŠÊ. SRš Ú˜õ¡¯õ¯ ÚÇšŠÀ š Ú šÝŠËš Š šÂššÏ õýš¥ŠÀ ššŠšš¥Š CASE IIIŠ š Ú šÝŠËšÇ š õ¯ŠšŠÊ. ÚšÏŠÏ CASEš Š¯ŠË¡ š Ú Š¯õý§š Š°ÚŠË¥ Š°ÇŠˋÇ SRšÇ 1.5š¡ õý§š¯ š Ú Š¯õý§š š¯´šÇõ¯ Ú˜šÏŠÏ 2.0š¡ õý§š¯ š Ú Š¯õý§š š¯´šÇõ¯ õݯš šŠÊ. šš¡ ŠÑšš šÚÇ MineRoš šÊš šÏÚšŠš õ¯ õÑÊŠš Sinkage, Slip velocityŠË¥ ŠÑšÚšŠÊ. Fig. 9š MineRoš šÏÚšŠŠË¥ Fig. 10, 11, 12š õ¯ õÑÊŠš Sinkage š Slip velocityŠË¥ Š°Çš˜šÊŠÊ.
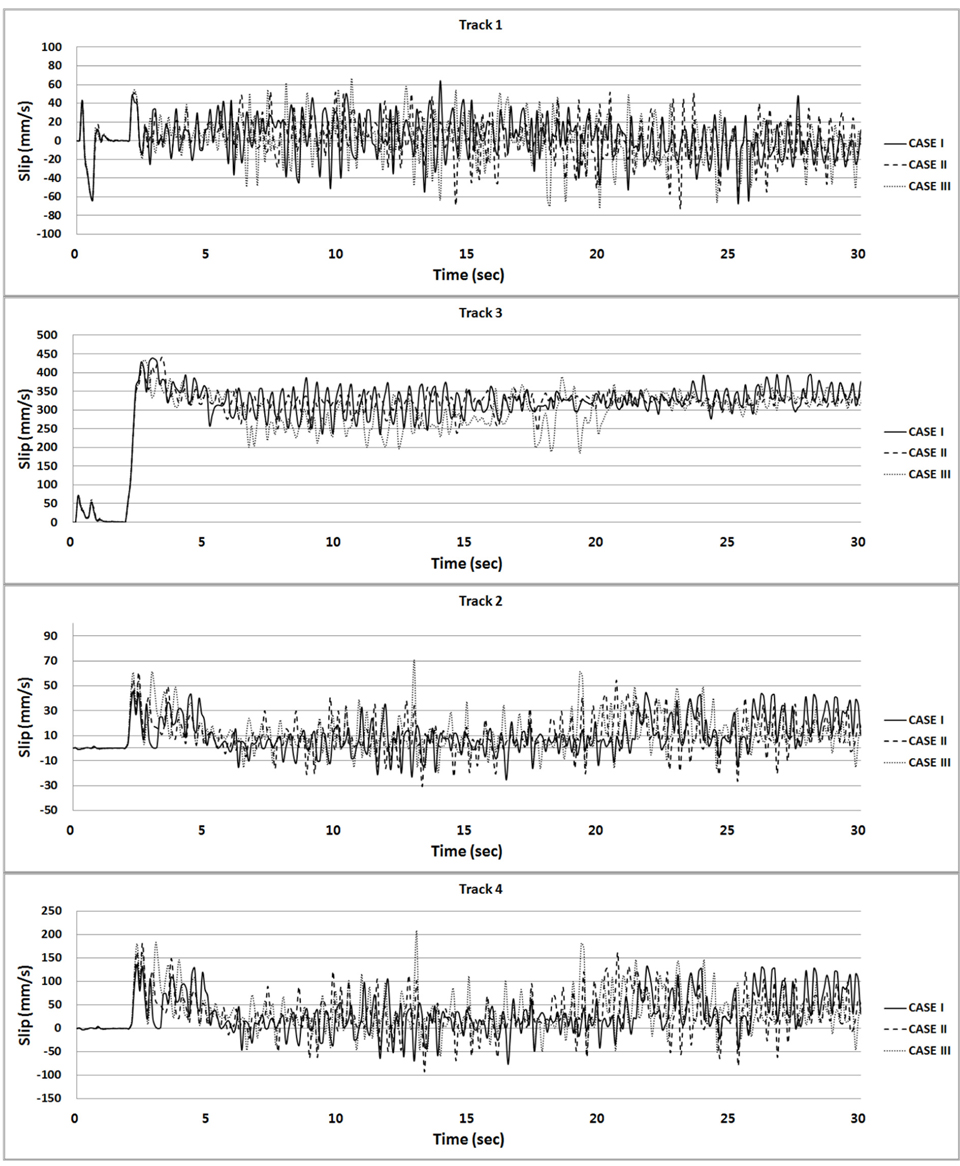
SRšÇ 1.5š¡ õý§š¯ šÏÚŠ¯ˋÚË šŠõ¯ Velocity profileš õÇõ°ššÇ š š˜Úõ¡¯ ŠŠ˜¡š Steering ratioš Š¯Š¥ š Ú Š¯õý§šÇ õý¯š ŠŠÊ. ÚšÏŠÏ SRšÇ 2.0š¡ õý§š¯ Velocity profileš Š¯Š¥ šÏÚŠ¯ˋÚË šŠõ¯ ŠÊŠËÇŠÊ. šÇ ŠŠ˜¡š š Ú Š¯õý§šÇ Steering ratioš Š¯Š¥ õý¯š ŠšÏ ššš Š°Çš˜šÊŠÊ.
Fig. 10š õ¯ õÑÊŠš Sinkageš Fig. 11, 12š õ¯ õÑÊŠš slip velocityŠË¥ Š°ÇŠˋÇ SRšÇ 1.5š¥ ŠŠ Slip velocityõ¯ Úõñ š š¥ŠÀ Ú¯ š¯´šÇ ššÇ šÈ¥Úš ÚšÏŠÏ 2.0š¥ ŠŠ š¯´šÇõ¯ Š¯šÚš˜ šÏÚ šŠš šÚËš šÊš š š ššŠÊ. SRšÇ Ú˜ŠˋÇ š Ú šÝŠËšÇ Š¿š¯Ú šÂššÏ õýš¥ŠÀ šš¡À ŠššÏŠÏ šÇ š¯õ瘊˥ ÚçÚÇ SRš šõ°õ¯šÇ šÈ¥šÇš ¡š¥ ŠÀŠÇš šÈ¥Úš ššÇ šš š š¡ šÈ¥Úš Š°ÇšËÚ š ššš š š ššŠÊ. ŠÑšš š š¡ šš¡ õñŠˆ
š ššÏ šÚŠšÏ ššš¥Šˋ¯ ŠÊš š¯õ瘊˥ ÚçÚÇ šÚÚ õ°ÚšÇŠÊ.
4. õý¯ ŠÀ
Š°¡ Š
¥Š˜¡ššŠ šŠÛ˜Š šÇš
š šÇšˋÚš˜ õÑÊŠ š¯´Šš šçš š Ú šÈ¥Ú Š¯ˋŠýš š¯õç˜Úš˜ šÊÚš ŠšýÇÚŠ ÚÇš Šˆ´Š¡š õ¯Š¯ÚšŠÊ. Š°¡ š¯õ瘊˥ ÚçÚÇ š£š õý¯ŠÀ š ŠÊšõ°¥ õ¯ŠÊ.
(1) õÑÊŠ š¯´Šš šŠ ÚŠÀÚš¥õ°¥ šÂš¯š¡À šŠ Š¿š Š¯Š¥ š Ú Š¯õý§š š¯´šÇõ¯ Ú˜Šˋ¯ CASE IIIšÇ Úš˜ šçš š š Ú šÀ¯õÝǚNJÊ.
(2) õ¯õ¯š CASEš õý§š¯ SRšÇ š£ÊšÏšŠÀ š Ú Š¯õý§šÇ ššš ¡ Š šÂš š Ú šÝŠËš š£š õýš¥ŠÀ ššŠšÏŠÏ CASE IIIš õý§š¯ Ú˜õý šÂššÏšÏ ššš¥Šˋ¯ SRšÇ 2.0š¡ õý§š¯ Velocity profile Š°ŠÀ Ú¯ š¯´šÇõ¯ ššš¥Šˋ¯ ŠÑšš šÈ¥Úš ÚšŠÊ.
(3) šçš š Ú šÈ¥Ú õ¡¯Šýš š ÚÚõ¡¯ šÚÇšŠ Š´¥š SRš õ¯š õý¯š ÚÇš¥ Úõ° SRš õý¯š š šÚÇ šõ°õ¯š š˜š š¯õ瘊˥ ÚçÚÇ š¯ƒšš¥ ŠÀŠÇšÇ šš š š¡ šÈ¥Úš Ú š šŠÊ.
(4) õ¯šýÇ Šˆ´Š¡ŠÀ ÚÇšÚ š ššŠ õÑÊŠ š¯´Šš õÑÊŠš õÑÊŠš˜šÇ, õÑÊŠš šÏŠˋÇ š˜šÇš š¯šÝ ÚÇšš ÚçÚÇ Fig. 13, 14šýŠ¥ õÑÊŠŠÊš š¯šÝšÇ š¯´Šš šÈ¥Ú Ú¿šÝ, šÈ¥Ú šŠš šÚËš šÊŠÊŠ š˜šÊõ°¥ šÇŠ šçš š Ú šÈ¥ÚšŠ šÚËš šÊŠÊŠ š š Úš¡Ú š ššŠÊ. Š¯Š¥š õ¡¯šÀÇš õ¯šýÇ Šˆ´Š¡ ÚÇšš õý¯õ°¥Š šÇŠ˜Ú š š õ° Š ÊÚšÏ šõ¡¯ ŠŠ˜¡š š ÚÚ šŠÛ˜Š šÇš
õý¯õ°¥ŠË¥ š£õ¡¯ šÚÇšŠ Š¿š Ú ŠÊŠ˜¥šýÇ ÚÇšš šÚÚš˜š¥ ÚŠÊ. Fig. 13š š¯´Šš š
Š Ë šŠõ¯ 0.5m/sŠÀ šÈ¥šÇšÀš Š õ¯šýÇ š¯´Š Šˆ´Š¡š šÊš šÈ¥Ú šŠš ŠÊŠ˜¥šýÇ š¯´Š Šˆ´Š¡š šÈ¥Ú šŠ Š¿õçŠË¥ Fig. 14Š FFTŠË¥ šÇšˋÚ šÈ¥Ú šŠš Ú¿šÝ Š¿õçŠË¥ Š°Çš˜šÊŠÊ.
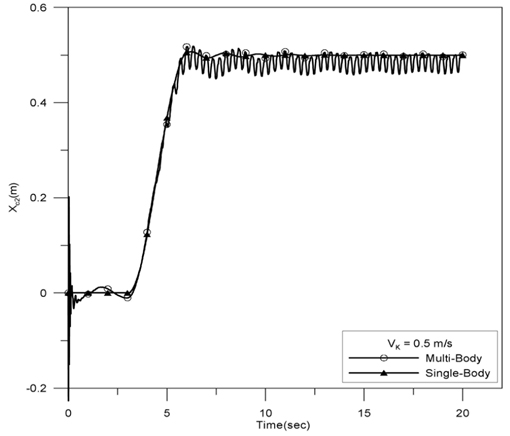

Fig. 14š Š°ÇŠˋÇ ŠÊŠ˜¥šýÇ ÚÇšõ°¥ õ¯šýÇ(Singlebody) ÚÇšš š¯´šÇŠË¥ Šˆ
ÚÚõý Úš¡Ú š šŠÊ. ŠÊŠ˜¥šýÇ ÚÇšššŠ š˜Š˜ š¯šÝ ššˋš šÚ Ú¿šÝšÇ šÈ¥Úš ŠšÙš¥ŠÀ õýšÑšÇ ŠšÏŠÏ õ¯šýÇ ÚÇšššŠ š¯šÝ Ú´õ°¥õ¯ šš¥Š₤ŠÀ Š´š¥ šÈ¥ÚšŠÏ õýšÑšÇ ŠŠÊ.
š¯´ Ú š¯õ瘚šŠ SRš šõ°õ¯š ŠÚ š¯õç˜ Š¯ õý¯š Š šçš š Ú Š¯ˋŠýš ÚçÚˋ šÝõÇ ššÊÚ
Šˆ´Š¡š š šˋÚš˜ Š°çÚˋš š¡ ÚŠÊšÇ ššˋÚ ŠŠ š šˋšÚ˜ š šŠšÏ Úš¡ Ú šš šÇŠÊ.




