


1. 서 론
몰수체는 민간용 또는 군용 등 여러 용도로 사용되고 있으며, 그 종류 또한 매우 다양하다(Yeo and Rhee, 2005). 국내외적으로 해양자원 탐사 및 개발, 각종 수중작업, 해양감시 및 정찰 등 다양한 분야에서 몰수체 사용이 증대되고 있다(Choi and kim, 2012). 따라서, 각각의 활용도와 임무에 부합하는 몰수체에 대한 연구개발 필요성이 증가하고 있는 실정이다(Kim et al., 2012). 몰수체와 같이 임무와 활용도가 명확히 정해진 운동체를 설계하기 위해서는 선체 설계기술, 추진기 설계기술, 항법 기술, 제어 기술, 통신 기술, 에너지 기술, 자율운항 기술, 센서 기술 등 다양한 기술들이 결합된 시스템 기술이 필요하다(Choi and kim, 2012). 몰수체의 종류를 막론하고 임무, 운동 특성 등을 고려한다면 몰수체 조종성능의 중요성은 특히 강조되며, 민⋅군을 가리지 않고 몰수체는 해당 임무에 부합하는 조종성능을 발휘해야 한다. 따라서 설계초기단계에서 몰수체의 조종성능을 추정하기 위한 방법이 요구된다(Park et al., 2015).
Yeo et al.(2006)은 순수 선체에 많은 부가물이 존재하는 잠수함에 대해 해당 부가물이 수평면, 수직면 안정성에 끼치는 민감도를 직⋅간접법을 병행하여 도출하였고, 안정성 여유가 부족한 선형에 대해 설계인자 변경 방법을 지침한 바 있다. 또한 조종운동 방정식의 외력을 구성하는 조종성 미계수에 대하여 각 조종성 미계수가 몰수체의 선회, 지그재그 등 다양한 조종시험에 기여하는 민감도를 분석한 바 있다(Yeo and Rhee, 2005). Kim et al.(2012)은 몰수체를 설계하기 위해서 조종성능을 실험적으로 추정하는 연구를 통하여 대형 제어형 예인전차(Computerized Planar Motion Carrier)를 활용한 구속모형시험을 통해 잠수함 표준조종운동방정식(Gertler and Hagen, 1976)에 기술된 모든 동유체력 미계수를 추정하였다.
본 연구에서는 현재 타 국가에서 운용되고 있는 실제 수중운동체를 기본형상으로 하여 조종성능, 운용성능 측면에서 보다 향상된 선형을 설계하고자 하였다. 선체에 부착되는 부가물은 제어판이 유일하므로 순수선체 후미부 형상, 전체제어판 면적대비 가동부 면적, 중앙평행부 길이 등을 설계변수로 설정하여 각 설계변수 별로 세 가지 선형을 제시하였고, 동적안정성, 선회성능, 그리고 운용성능을 토대로 한 동특성을 분석하였다.
2. 선형 설계
2.1 후미부 각 변경
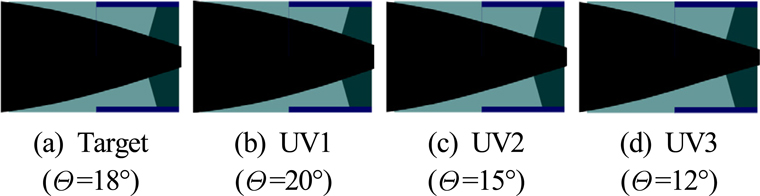
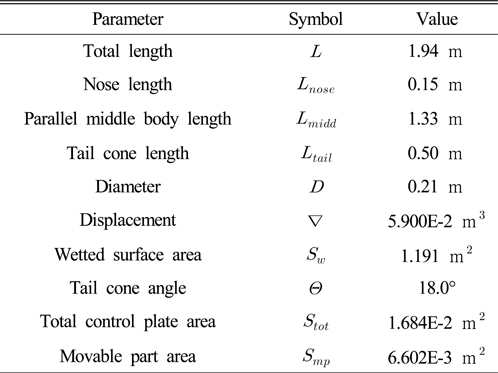
Myring(1981)은 영국왕립비행단(Royal Aircraft Establishment) 기술 보고에 동일한 체적과 영각이 0° 인 상태에서 동체에 걸리는 항력을 최소화하는 선형 형상방정식을 제시하였다. 본래 이 형상방정식의 목적은 우주선, 로켓 등 항공기술에 접목하는 것이었으나, 최근 들어 무인잠수정(Autonomous Underwater Vehicle), 어뢰 등 민간용 또는 군용 몰수체에 다수 적용되고 있다. 동체 형상은 두부(Nose), 중앙평행부(Parallel middle body), 후미부(Tail cone)로 나뉜다. 후미부 각을 변화시킨 선형은 Myring이 제시한 선형 형상방정식을 토대로 제시하였고, 먼저 동특성의 기준을 제시하기 위해 기존 형상을 모방하였다. 모방한 선형은 Fig. 1과 같이 Target이라고 명명하였다. 모방한 Target 선형은 상하⋅좌우가 대칭인 형상이며, 후미부에 위치한 제어판의 고정부와 가동부가 구분되고, 가동부 끝단에는 End plate가 장착된 형태로서 주요제원은 Table 1에 나타내었다. 모방선형의 후미부 각은 18°를 이루고, 이를 기반으로 후미부 각을 20°, 15°, 12°로 제안하였으며 각 선형을 UV1, UV2, UV3으로 명명하였고, 각 선형 후미부 형상을 Fig. 2에 도시하였다. 후미부 각을 변경하면 침수표면적, 전체 제어판 면적, 가동부 면적, 유효종횡비 등이 함께 변한다.

2.2 가동부 면적 변경
후미부 형상에 따라 전체 제어판 면적을 확보할 수 있는 공간을 넓힐 수도 있고, 좁힐 수도 있다. 전체 제어판 면적을 충분히 확보할 수 있도록 후미부 각이 12°를 이루는 UV3 선형을 기반으로 가동부 면적을 변경한 선형을 제안하였다. 전체 제어판 면적과 가동부 테이퍼비(Taper ratio)가 동일한 조건 하에서 일정 비율로 가동부 면적을 증가 시켰고, Fig. 3과 같이 UV3_MOD1, UV3_MOD2, UV3_MOD3으로 명명하였다.

2.3 중앙평행부 길이 변경
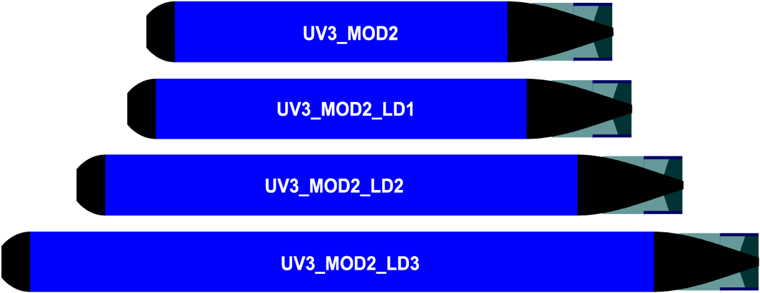
탑재하는 배터리 용량을 산정하여 항주시간을 결정하므로 초기설계단계에서 중앙평행부 길이는 몰수체 주요 설계인자가 되며, 이에 따른 동특성 분석이 요구된다. 가동부 면적을 변경한 제안선형 중 UV3_MOD2 선형을 채택하고, 직경, 두부 길이, 후미부 길이가 동일한 조건 하에서 중앙평행부 길이를 변경한 선형을 제안하였다. 이 경우 몰수체 세장비(L/D), 전체 배수용적, 침수표면적, 원점으로부터 제어판 압력중심위치가 달라지게 된다. 상기에서 제시한 몰수체는 세장비가 9.24를 이루고 있고, 세 장비가 10, 12, 15가 되도록 중앙평행부 길이를 확장하였으며, 각각 UV3_MOD2_LD1, UV3_MOD2_LD2, UV3_MOD2_LD3으로 명명하였고, Fig. 4에 후보 선형들 형상을 도시하였다.
3. 동역학 해석
3.1 좌표계 및 조종운동방정식
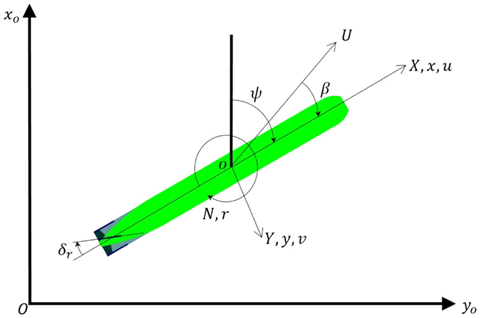
동역학 해석에 사용되는 좌표계는 Fig. 5와 같이 수평면 운동에 대하여 우수 직교좌표계인 지구고정좌표계(O − xoyo )와 몰수체 고정좌표계(o− xy)로 구성된다. 지구고정좌표계의 xo -축과 몰수체 고정좌표계의 x-축이 이루는 각을 선수각(ψ), 속력이 향하는 방향과 x-축이 이루는 각을 편류각(β)으로 정의한다. 몰수체 이동궤적은 지구고정좌표계에서 정의하고, 몰수체에 작용하는 외력과 운동방정식은 몰수체 고정좌표계에서 기술한다.
몰수체는 6자유도 운동을 하지만 상하⋅좌우 형상이 대칭이므로 수평면과 수직면 간에 연성이 작다. 따라서, 본 논문에서는 수평면 운동만을 고려하여 식 (1)과 같이 3자유도 운동방정식으로 간략화 하였다.

여기서, m, Izz , xG는 각각 몰수체 질량, 질량관성모멘트, 길이 방향 무게중심을, u, v, r은 각각 전후동요 속도, 좌우동요 속도, 선수동요 각속도를 의미하고, ˙는 시간변화율을 의미한다. 우변에 기술된 XE, YE, NE 는 외력으로서 다음 절에 소개한다.
3.2 외력 모델링
몰수체에 작용하는 외력은 조류와 같은 환경적 외란이 없다고 가정하면, 식 (2)와 같이 동유체력, 추력, 제어력으로 구성할 수 있다.

여기서, 하첨자 H, T, δ는 각각 동유체력, 추력, 제어력을 의미한다. 일반적으로 선형 운동방정식은 안정성 해석과 제어기를 설계할 때 적용한다. 비선형성이 강한 선회운동이나 대영각 운동에 있어서 선형 모델은 적절치 않다. 하지만 해석하고자 하는 운동체의 속력이 매우 빠른 경우에는 선형성이 보장된다. 본 논문에서 대상으로 한 몰수체는 고속 기동하는 운동체로서, 수평면 운동에 있어 편류각이 크게 발생할 수 없다. 또한 속력 대비 좌우동요 속도와 선수동요 각속도는 작은 값을 띄기 때문에 비록 선회운동이라 할지라도 좌우동요 속도와 선수동요 각속도는 미소 섭동운동을 한다고 볼 수 있다. 이러한 고속기동 몰수체의 동특성을 고려하면, 식 (2) 우변에 기술된 동유체력은 식 (3)과 같이 저항성분을 제외하고는  , Yv , ..., Nr과 같은 선형 동유체력 미계수로 모델링할 수 있다.
, Yv , ..., Nr과 같은 선형 동유체력 미계수로 모델링할 수 있다.
, Yv , ..., Nr과 같은 선형 동유체력 미계수로 모델링할 수 있다.
추력은 설계속력에서 저항과 항상 평형을 이룬다는 가정 하에 설계속력에서의 저항과 반대방향 힘으로 모델링하였고, 제어력은 식 (4)와 같이 수평면 운동임을 감안하여 방향타각(δr)에 의한 제어력계수를 적용하여 모델링하였다. 부가질량계수를 포함한 동유체력 미계수는 동체를 등가의 날개로 치환했을 때의 경험식을 적용하였고(HDW, 2002), 저항계수는 ITTC(The International Towing Tank Conference) 공식(Lewis, 1989)을 적용하여 도출하였으며, 무차원화는 SNAME(The Society of Naval Architects and Marine Engineers)에서 정의한 Prime system Ⅰ을 준수하였다(Fossen, 2011).

3.3 안정성 평가
제어장치를 고정한 상태(δr = 0°)에서 전후동요는 좌우동요, 선수동요와 연성되지 않는다고 가정하고, 미소 섭동운동하는 좌우동요-선수동요 연성운동방정식을 고유치에 대한 특성방정식으로 표현하면 식 (5)와 같이 2차방정식으로 표현된다.

여기서, 
식 (5)에서 s, U는 각각 특성방정식의 근과 항주속력을 나타낸다. 시스템이 동적안정성을 확보하기 위해 식 (5)에 기술된 특성방정식 근의 실수부가 음의 값을 가져야 하며, 근과 계수와의 관계에 의하여 A, B, C가 모두 0보다 작아야 한다. 일반적으로 안정성계수 중에 Nv가 양의 값을 가지면 수평면 운동은 항상 안정하다.
Target 선형을 비롯한 UV1, UV2, UV3 선형의 안정성계수를 Fig. 6(a)에 비교하여 도시하였다. 후미부 각을 변경한 선형은 순수 선체 형상에서 큰 차이를 구분할 수 없기에 안정성계수는 후미부에 부착된 제어판 형상에 의해 좌우된다. 전체 제어판 면적이 가장 작은 UV1 선형은 Nv가 음의 값을 보이고 있다. 또한 안정성해석은 제어기를 고정한 상태에서 수행하므로 전체 제어판 면적이 동일한 상태에서 가동부 면적을 변경해도 Fig. 6(b)와 같이 안정성계수는 변하지 않으며, 고유치의 실수부 또한 Fig. 8(b)와 같이 동일하다.
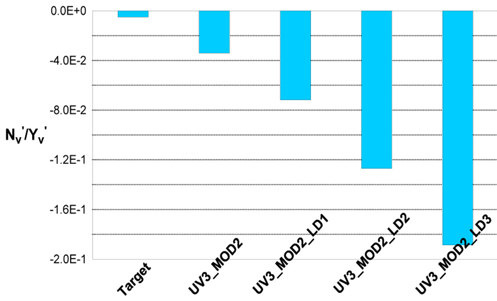
중앙평행부 길이를 변경한 UV_MOD2_LD1, UV_MOD2_LD2, UV_MOD2_LD3 선형의 안정성 계수를 Fig. 6(c)에 도시하였다. 안정성계수를 무차원하는 과정에서 선체의 전체 길이를 고려하게 된다. 그러므로 길이가 서로 다른 선형은 계수들 간에 상대적인 값을 비교하는 것이 타당하고, 이를 기반으로 Fig. 7에 도시한 좌우동요 감쇠력의 작용점 거리( )는 중앙평행부 길이가 길어질수록 큰 음의 값을 가지는 확인할 수 있다. 이런 이유로 고유치의 실수부는 Fig. 8(c)와 같이 큰 음의 값을 가진다. 이는 중앙평행부 길이가 길어질수록 제어판 압력중심 위치가 후미부로 이동한 결과로 안정성 측면에서 유리한 설계방향이 된다. 안정성을 확보하기 위한 가장 좋은 방법으로 제어판 압력 중심을 후미부로 위치시키는 것은 선행연구에서도 거론한 바 있다(Yeo et al., 2006).
)는 중앙평행부 길이가 길어질수록 큰 음의 값을 가지는 확인할 수 있다. 이런 이유로 고유치의 실수부는 Fig. 8(c)와 같이 큰 음의 값을 가진다. 이는 중앙평행부 길이가 길어질수록 제어판 압력중심 위치가 후미부로 이동한 결과로 안정성 측면에서 유리한 설계방향이 된다. 안정성을 확보하기 위한 가장 좋은 방법으로 제어판 압력 중심을 후미부로 위치시키는 것은 선행연구에서도 거론한 바 있다(Yeo et al., 2006).
)는 중앙평행부 길이가 길어질수록 큰 음의 값을 가지는 확인할 수 있다. 이런 이유로 고유치의 실수부는 Fig. 8(c)와 같이 큰 음의 값을 가진다. 이는 중앙평행부 길이가 길어질수록 제어판 압력중심 위치가 후미부로 이동한 결과로 안정성 측면에서 유리한 설계방향이 된다. 안정성을 확보하기 위한 가장 좋은 방법으로 제어판 압력 중심을 후미부로 위치시키는 것은 선행연구에서도 거론한 바 있다(Yeo et al., 2006).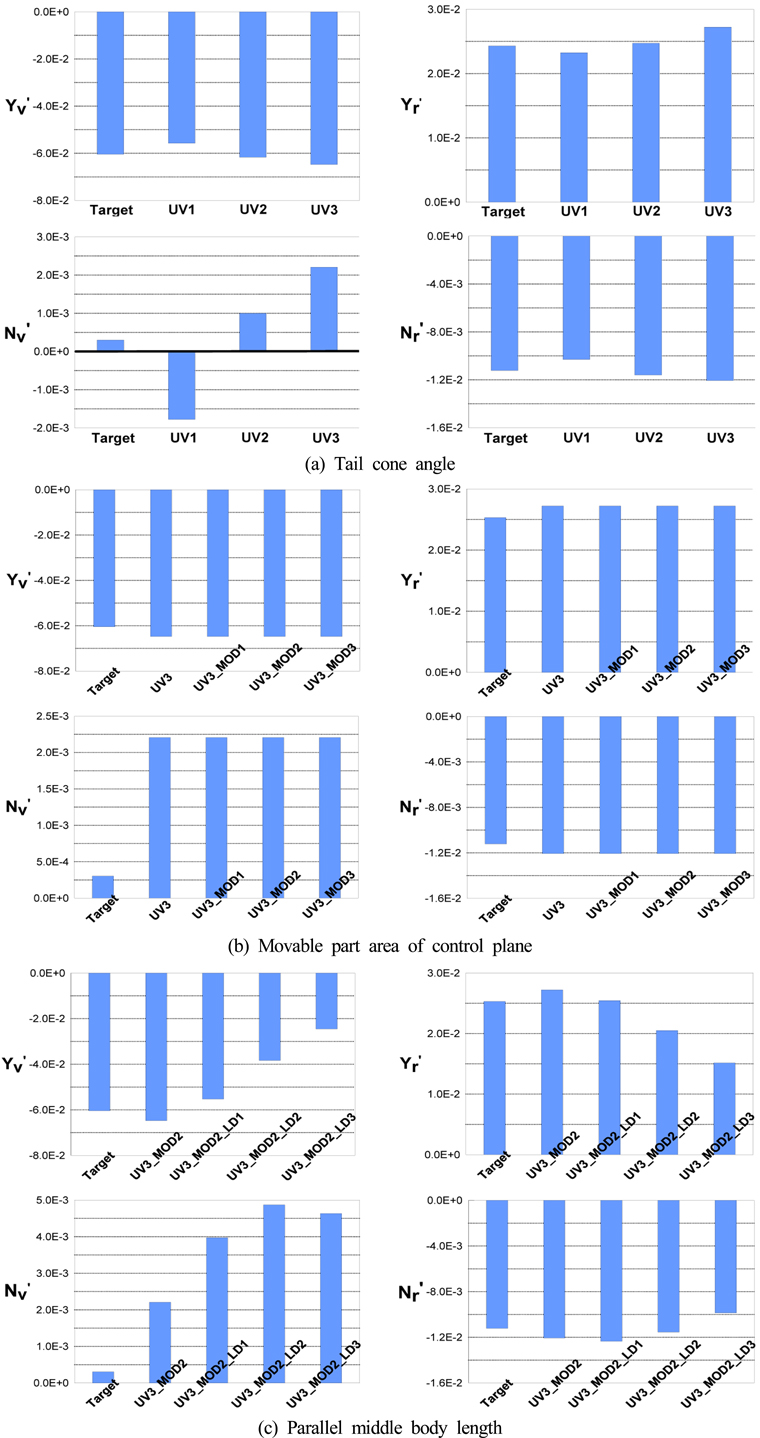

3.4 선회성능 평가
선회성능은 제어판 고정상태에서 정의되는 안정성계수와 더불어 제어판 관련 제어력계수에 크게 영향을 받는다. 선회성능을 평가하는 지표는 선회궤적과 정상선회각속도로 선정하였고, 후미부 각, 가동부 면적, 중앙평행부 길이를 변경한 선형의 제어력계수를 각각 Fig. 9에 도시하였다. 제어판 가동부 단면 형상은 NACA0008을 적용하였다. 제어력계수에 영향을 끼치는 설계 변수는 제어판 유효종횡비, 테이퍼비, 가동부 면적 등이 있을 수 있으며, 알려진 바와 같이 가동부 면적에 크게 영향을 받는다. 가동부 압력중심 위치가 동일하다면 제어력계수의 절대치는 가동부 면적이 큰 선형일수록 큰 값을 지니게 된다.
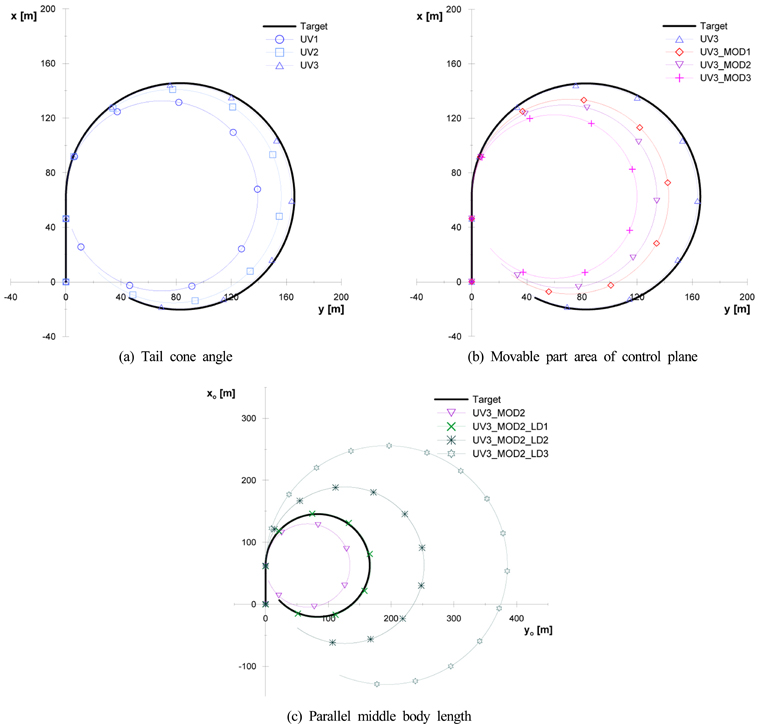
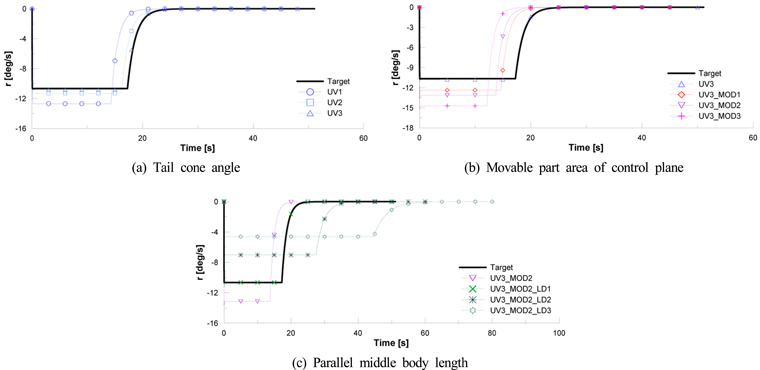
후미부 각을 변형한 UV1, UV2, UV3 선형의 경우, Fig. 9(a)와 같이 후미부 각이 작을수록 제어력계수의 절대치는 커지는 경향이 있으나 동일하게 Fig. 6(a)와 같이 안정성계수의 절대치도 커지게 된다. 이러한 이유로 후미부 각이 20°를 이루고 있는 UV1 선형이 Fig. 10(a)와 Fig. 11(a)에서 볼 수 있듯이 오히려 선회성능이 좋은 결과를 보이고 있다. 후미부 각을 변형한 선형에 비해 가 동부 면적을 변형한 UV3_MOD1, UV3_MOD2, UV3_ MOD3 선형은 Fig. 9(b)와 같이 제어력계수 간에 큰 차이를 보이고 있고, Figs. 10(b)~11(b)와 같이 선회성능 또한 큰 차이를 보이고 있다.
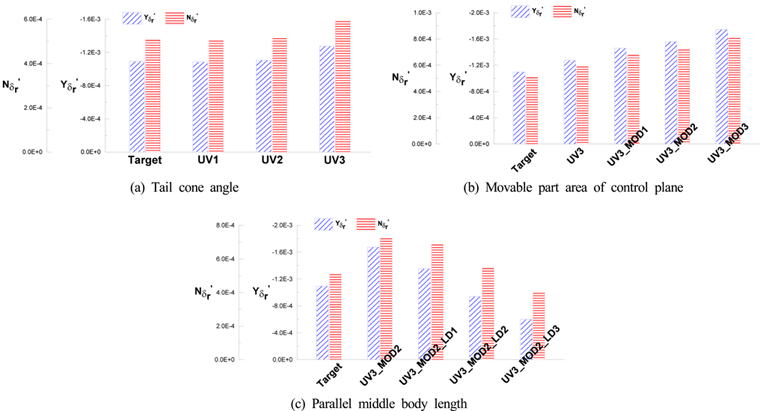
반면에 중앙평행부 길이를 확장한 UV3_MOD2_LD1, UV3_MOD2_LD2, UV3_MOD2_LD3 선형의 경우, 중앙평행부 길이가 커질수록 제어력계수는 확연히 줄어들게 되고 Figs. 10(c)~11(c)와 같이 선회성능이 매우 악화된 것을 확인할 수 있다.

3.5 운용성능 평가
대상 몰수체는 고속에서 운용되고, 목표물을 빠르고 정확하게 추적해야 한다는 목적을 가지고 있다. 운용성능은 목표물에 빠르게 접근할 수 있는 성능을 의미하고, 성능평가를 위해 Fig. 12와 같이 임의로 운용상황 시나리오를 설정하였다. Fig. 12에 도시한 궤적을 보면, 목표물이 아함을 등지고 있어 몰수체가 아함으로부터 사출되어 목표물까지 접근해야하는 최장거리인 Path Ⅰ이 가장 최악의 상황이라고 볼 수 있다. 목표물이 아함을 등지고 있다고 가정하면, 몰수체가 아함에서 사출되어 선회를 하다가 직진을 해야 하는 상황이 발생한다. 이러한 상황은 몰수체가 사출된 후, 최소 선회반경의 선회성능이 요구되고, 타각 명령시 즉각적으로 반응하는 변침성능이 요구되며, 동시에 직진구간에서 제어장치를 고정했을 때의 안정성이 복합적으로 요구되는 상황이다.


4. 결 론
현재 운용중인 기존 몰수체 형상을 모방하여 동특성을 분석하고, 이를 기반으로 주요 설계인자를 변경한 선형을 제시하였다. 초기설계단계에서 결정하는 주요 설계인자인 후미부 각, 제어판 형상과 면적, 중앙평행부 길이 변경에 따른 조종특성을 분석하여 다음과 같은 결론을 도출하였다.
(1) 안정성 측면에서는 전체 제어판 면적을 증가시키고 제어판 위치를 후미부에 위치시키는 것이 중요하다. 세장비가 크고 고속에서 운용되는 몰수체는 전반적으로 안정성이 우수하다.
(2) 선회성능은 제어력계수에 가장 민감하였고, 제어력계수는 전체 제어판면적 대비 가동부 면적을 증가시켜는 것이 가장 좋은 방법이다.
(3) 중앙평행부 길이를 확장할 경우, 저하된 선회성능을 보상하기 위한 가동부 면적을 증가시켜야 한다.
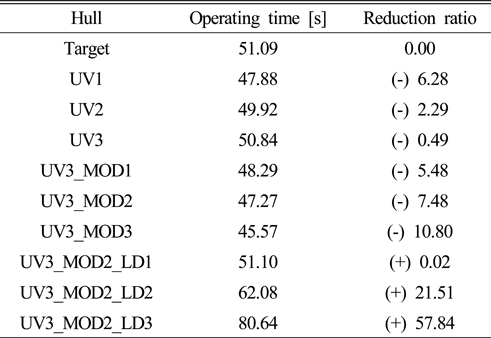
(4) Table 2에 기술된 운용시간을 보면, 전반적인 운용시간은 선회성능이 우수한 선형일수록 짧아진다. 직진성과 변침성이 우수한 고속 몰수체의 운용성능은 결국 선회성능에 크게 영향을 받는다고 할 수 있다.




