해양 소방 안전을 위한 자율수상로봇 개발
Development of Autonomous Surface Robot for Marine Fire Safety
Article information

Trans Abstract
The marine industry is rapidly developing as a result of the increase in various needs in the marine environment. In addition, accidents involving ship fires and explosions and the resulting casualties are increasing. Generally, manpower and safety problems exist in fire fighting. A fire fighter in the form of an autonomous surface robot would be ideal for marine fire safety, because it has no manpower and safety problems. Therefore, an autonomous surface robot with the abilities of fire recognition and tracking, nozzle selection, position and attitude control, and fire fighting was developed and is discussed in this paper. The test and evaluation results of this robot showed the possibility of real-size applications and the need for additional studies.
1. 서 론
해양 환경에서의 다양한 요구가 증가함에 따라 해양산업이 빠르게 발전하고 있다. 이와 더불어 선박 화재 및 폭발 사고도 증가하고 있으며(Hong et al., 2009; Lee and Back, 2006; You and Chung, 2015), 그 결과에 따른 인명피해도 증가하고 있다. 화재를 미리 예방하는 것이 가장 바람직하지만 화재 발생 이후의 초기대응도 매우 중요하다(Kim et al., 2015; Ko et al., 2012). 또한 대형화를 막기 위해서는 신속한 출동과 화재진압이 필요하다.
하지만 해양화재 발생 시 초기대응은 해양이라는 특수한 환경으로 소방정과 소방함과 같은 선박을 활용하여 화재를 진압하는 방식을 사용하고 있다. 일반적으로 이 과정에서 필요한 인원은 선박 운전, 소방 호스 분사 등 최소 1인이 필요하다. 또한 배위에서 화재를 진압하기 위해서는 외란에 의해 흔들리는 불안전한 상황에 사람이 직접 소방 호스를 이용하여 물을 분사하는 방식이 대부분인데 이때 안전성의 문제가 존재한다. 이러한 문제를 해결하기 위해 광학영상 정보로 화재를 인식하고, 화재가 진압될 때까지 화점을 지속적으로 추적하여 화재를 진압하며, 외란으로부터 선체의 자세를 유지하면서 효율적인 화재진압이 가능한 자율식 수상로봇의 개발이 필요한 상황이다.
따라서 본 논문에서는 기존의 화재진압용 수상로봇의 장점을 유지하며 단점을 보완하는 로봇을 개발하였다(Sa et al., 2016). 또한 화재진압 시에는 인력이 필수적이라는 문제가 있으며, 화재진압 시 선체가 외란에 의해 자세를 유지하기 힘든 부분이 있다. 본 논문에서는 인력문제를 해결하고 효율적으로 화재를 진압하기 위해서 해양 소방 안전을 위한 자율식 수상로봇개발을 제안하고자 한다. 제안된 로봇은 기존의 화재진압용 수상로봇을 기반으로 개선되었으며, 광학영상과 온도정보를 기반으로 Host PC에서 제어가 가능하며, 자율로 화재를 진압할 수 있도록 화재를 인식하고 추적한다. 로봇의 개발은 글로벌 표준 프로세스를 기반으로 진행하였다(Kim, 2013; Kim et al., 2012).
2. 시스템 개발
로봇 하드웨어 제작 과정은 다음과 같다. 먼저, Fig. 1과 같이 운용개념을 정립하였다.

Diagram of operation concept
로봇의 몸체는 쌍동선형태로 구성하여 로봇팔을 장착하였다(Kang et al., 1996). 이동시에는 접은 상태로 이동하여 외란의 영향을 최소화 하였고 임무 수행 시 로봇팔이 펼쳐질 수 있도록 구성하였다. 로봇의 운용은 로봇에 장착되어있는 카메라에서 전송된 영상정보와 온도정보를 기반으로 실시하게 된다. 원격으로도 제어가 가능하도록 Host PC를 통해 명령을 전달할 수 있도록 구성하였다. 또한 로봇은 획득한 카메라 정보를 기반으로 추적을 실시하고, 초음파거리센서와 워터젯을 이용하여 임무수행 시 외란으로부터 자세를 유지하여 자율적으로 화재를 진압할 때 도움을 주도록 하였다.
운용개념을 기반으로 3D툴을 사용하여 설계를 실시하였다. Fig. 2는 워터젯을 이용하여 추진기로 만들어 낼 수 없는 Sway, Yaw운동을 만들어내 임무 수행 시 유동적인 자세유지가 가능하도록 설계하였다. Fig. 2에서 Wω , Wχ , Wγ , WZ 는 각각의 워터젯을 나타내며, VW w , VW χ , VW γ , VW Z 는 워터젯의 추진력의 방향을 나타낸다. a와 b는 로봇의 추진을 담당하는 수중모터를 나타내며, V a, V b는 수중모터의 추진력 방향을 나타낸다.
Layout of waterjets
Fig. 3은 완성된 시제품의 모습이다. 3D모델링 기반으로 3D프린터를 이용해 전체적인 선체를 제작하였고 로봇의 상단은 아크릴을 사용해 몸체를 제작하였다. 다른 부분들은 상용품과 모델링하여 만든 제작품을 이용하여 구성하였다.

Prototype of surface robot
Host PC와 로봇의 제어는 시제품이 축소 모형임을 고려하여 블루투스 또는 지그비 등의 무선통신을 이용하여 통신을 할 수 있도록 하였다. 자율제어를 할 수 있도록 카메라를 통해 획득한 광학영상정보와 온도정보로 영상처리를 하여 화재패턴을 분석하고 추적을 가능하게 하였다(He et al., 2014). 다음 Table 1은 완성된 로봇의 제원이다.

Specification of prototype
3. 자율 화재진압 기법
3.1 화재 인식 및 추적
기존의 로봇은 카메라의 영상정보로만 화재를 인식하고 진압했다. 하지만 화재는 연기나 화재시간 등으로 인해 영상정보로만 인식하기에는 한계가 있다. 따라서 영상정보과 온도정보를 같이 획득할 수 있는 FLIR(Forward looking infrared)카메라로 인식하기 최적의 정보를 얻을 수 있다. 따라서 광학정보로만 수행하기 힘든 작업을 수월하게 작업할 수 있도록 하였다. 획득한 영상의 영상처리 결과를 이용하여 자율제어기법을 실시한다. 이때 영상처리 방식은 RGB(Red-Green-Blue) 방식을 기반으로 진행하였다. RGB 방식은 적·녹·청을 혼합하여 원하는 색을 만드는 방식이다. 즉, 화면상의 한 점의 색은 3색의 조합으로 만들어지는데, 조합으로 만들어지는 색은 다음과 같이 된다. R은 적색, G는 녹색, B는 청색이며, R과 G의 조합은 황색, R과 B의 조합은 붉은 보라색(마젠타), B와 G의 조합은 청록색(시안), 3색 조합은 백색, 어느 것도 비춰지지 않으면 흑색으로 표현된다. 이를 이용하여 영상에서 화재를 인식하도록 한다. 화재를 인식하고 추적하기 위해 Fig. 4와 같이 좌표계를 설정하였다.

Segment coordinates system
이해를 돕기 위해 Fig. 5와 같이 왼쪽하단 A7 영역에 화재가 인식된 경우로 예시를 들었다. 현재의 화재영상정보로부터 중심영역을 추출한 결과인 화점을 초록색 원을 표현하여 원하는 색의 RGB 값을 이용하여 화재를 인식하는 과정을 거친 영상에 해당한다.
Image processing example
먼저 영역의 중심을 설정하는 과정은 식 (1)로 나타내었다. 예를 들어 Fig. 4에 정의된 A9 영역의 중심을 나타내는 식은 다음과 같다.
여기서 χc 는 X축 기준의 좌표 값이고, yc 는 Y축 기준의 좌표 값으로 정의하였다.
식 (2)는 Linear D/C 모터와 Linear servo 모터를 구동하여 초록색 원으로 나타낸 화점을 A7 영역에서 A9 영역으로 이동시키는 식이다. 상하는 Linear servo 모터, 좌우는 Linear D/C 모터를 이용하여 A7 영역에 위치한 화점에 대해서 Linear servo 모터를 아래로 이동, Linear D/C 모터를 좌측으로 이동하여 A9 영역으로 위치할 수 있도록 하였다. Fig. 5에서 화점의 중심을 Circle(χ,y)로 정의하였을 때, 앞서 설명한 알고리즘을 나타내는 식은 다음과 같다.
그리고 식 (2)의 알고리즘은 다음의 조건을 만족할 때 까지 반복적으로 수행된다.
반복적으로 식 (2)의 명령을 수행하여 식 (3)을 만족하게 되면 배 위의 워터펌프가 구동되어 범위에 존재하는 화재를 진압하게 된다. 진압 중 잔존하는 화재가 인식되면 다시 위 식을 반복 수행하여 지속적으로 추적하여 화재를 완벽하게 진압하도록 하였다. 예시로 활용된 알고리즘을 포함하여 A1~A9 영역별 9개의 지정된 알고리즘을 적용하여 화재영역이 인식되면 지속적인 추적이 가능하도록 하였다.

Image processing result
3.2 노즐선택
화재패턴분석이 진행되면 패턴에 따른 노즐이 필요하다. 노즐은 상황에 따라 직사형, 분산형, 방사형 3가지로 분류하였다. 영역을 Fig. 7처럼 3영역 분할하여 구분하였다.
Three-area segment
왼쪽, 중앙, 오른쪽 각각 한 범위에 속하면 노즐부의 직사형(Direct shape), 왼쪽과 중앙범위이거나 중앙과 오른쪽범위 또는 전범위에 속할 경우 방사형(Radial shape), 왼쪽과 오른쪽이 동시에 있는 패턴일 경우 분산형(Spraying shape) 노즐을 선택하도록 하였다. 노즐부의 형태는 Fig. 8에 나타내었다.

Nozzle part
3.3 로봇의 자세유지
화재를 정확하게 인식하고, 패턴을 분석하기 위해서는 로봇과 화재지점의 일정한 거리유지가 필요하다. 같은 패턴이라도 거리가 멀거나 가깝다면 다른 패턴으로 인식하기 때문이다. 이를 해결하기 위해 로봇의 왼쪽측면에 3개의 초음파거리센서와 워터젯을 활용하여 거리를 유지하였다. Fig. 9는 로봇의 왼쪽측면에 부착한 초음파거리센서의 배치도를 나타내었으며, 각각의 센서는 전면부터 D1, D2, D3로 차례대로 정의하였다.

Layout of distance sensors
앞서 설명한 시스템으로 로봇이 일직선을 유지 할 때 식 (4)를 이용하여 중앙에 위치한 D2값을 20~25cm를 유지하여, 그에 따른 정보를 얻고자한다.
하지만 해양은 로봇이 일직선을 유지하며 거리를 조절하기 힘든 환경이다. 따라서 D1과 D3의 차를 이용하여 로봇 자체의 자세를 일직선으로 유지할 수 있어야 한다. 식 (4)의 첫 번째 식을 만족하는 경우에 식 (5)를 활용하여 D2와 D1의 값의 차를 계산하였을 때 양의 값이 나온다면 D1과 화재지점이 가까우며, D3과는 멀어진 경우이므로 워터젯 Wω 와 WZ 를 구동하여 우측 Yaw운동을 하여 로봇을 일직선으로 유지하도록 하였다.
Table 2는 워터젯과 초음파거리센서를 이용하여 획득한 정보를 활용하여 자세를 유지하는 알고리즘을 정리한 것이다. 워터젯의 출력은 최대출력인 255로 설정하였다.
Waterjet and sensor
4. 시험평가
개발된 로봇의 성능 검증을 위해 시험평가를 실시하였다. 시험평가 항목으로 다음 4가지로 설정하였다. Propulsion(T1)은 로봇의 추진과 관련된 시험평가 항목이며, Communication(T2)는 로봇을 제어하기 위해 로봇과 Host PC의 통신을 실시하여 제어 가능 여부를 확인하기 위항 항목이다. Manipulation(T3)는 로봇이 화재를 진압하기 위해 부착된 로봇팔을 동작하여 화재가 진압되는지 확인하는 항목이다. 마지막으로 Autonomous control(T4)는 Ⅲ장에서 제안된 자율제어기법이 로봇에 적용되어 제어가 가능한지 확인하기 위한 항목이다. 요구항목은 요구사항 분석 결과인 이동성(R1), 관측성(R2), 조작성(R3), 안정성(R4), 유지보수성(R5)이며, 기능항목은 조파저항 최소화 기능(F1), 로봇추진 기능(F2), 화재추적 기능(F3), 로봇팔제어 기능(F4), 노즐선택 기능(F5), 화재진압 기능(F6), 자세유지 기능(F7), 모듈화 기능(F8), 프로그램 다운로드 기능(F9)이다. H/W 및 S/W 항목은 H/W 및 S/W Family tre-e의 구성품이다. Table 3은 각 항목이 추적성을 유지하는지를 확인하는 시험평가 결과를 나타낸 것이다.
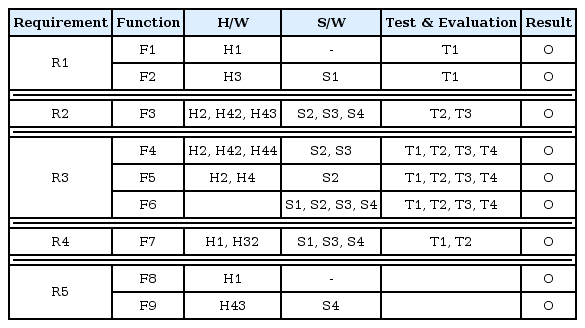
Test & Evaluation
Fig. 10은 지금까지 설명한 자율제어기법을 이용하여 화재를 진압하는 과정이다. (a)는 화재를 인식하는 과정이고, (b)는 화재지점과 거리를 유지하고, (c)는 인식한 화재의 패턴을 분석하여 알맞은 노즐을 선택하는 과정이다. (d)는 워터펌프를 구동하여 화재를 진압하고, (e)는 화재 진압 후 남아 있는 불씨를 추적하여 완전히 화재를 진압하는 과정이며, (f)는 화재가 완전히 진압된 것을 확인한 후 알고리즘이 종료된 상태이다.
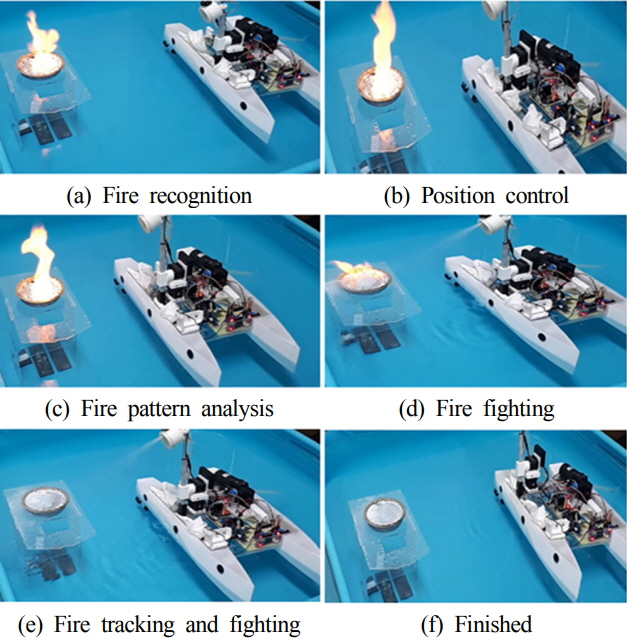
Fire fighting
5. 결 론
본 논문에서는 증가하는 해양화재를 진압하기 위해 기존의 문제점을 파악하고, 문제해결을 위해 기존의 화재진압용 로봇을 기반으로 자율제어가 가능한 화재진압용 로봇을 개발하였다. 로봇의 개발은 글로벌 표준 프로세스를 적용하여 진행되었다. 개발된 화재진압용 수상로봇은 FLIR카메라 영상을 기반으로 로봇팔 시스템을 이용하여 화재를 진압할 수 있도록 구성하였다. 또한 카메라에서 획득한 영상을 기반으로 영상을 인식하고 패턴을 분석하여 화재를 추적하는 알고리즘을 적용하였다. 그리고 화재진압 시 선박이 흔들리는 문제를 해결하기 위해 초음파거리센서와 워터젯을 이용하여 화재지점과 거리를 유지하고 외란으로부터 자세를 유지할 수 있도록 하여 화재를 자율로 진압할 수 있는 자율제어기법을 설계하여 로봇에 적용하였다. 자율제어기법은 영상정보의 RGB값을 기반으로 화재의 패턴을 파악하고 화재를 진압할 때까지 추적하도록 영상처리를 실시하였다. 화재의 영상정보에 대해 영역분할을 이용하여 작업범위를 제안하고 화재의 분포정도를 이용하여 패턴을 분석하고, 화점을 파악하여 추적하도록 하여 로봇의 제어를 결정한다. 로봇의 성능검증 및 자율제어기법의 실제 적용 가능성을 확인하기 위해 시험평가를 진행하였다. 시험평가를 실시하여 로봇의 개발 과정에서 실시한 요구사항 및 기능분석, 설계 등의 결과와 실제 제작된 로봇의 결과물의 충족여부를 확인하였다. 시험평가를 통해 제안된 자율제어기법을 적용하여 화재진압이 가능한 것을 확인하였으며, 제안된 기법이 문제없이 적용되는 것을 확인하였으나 워터펌프 구동 시 로봇의 전체적인 밀림현상이 존재함을 확인하였다.
추후 연구에서는 워터펌프에 의한 밀림현상을 해결하기 위한 방안을 연구할 계획이다. 또한 제안된 자율제어기법에서는 FLIR카메라에서 들어오는 정보만으로 자율제어를 실시하였는데, 화재가 발생하지 않았을 시에는 열화상카메라의 특성상 운용에 어려움이 있으므로 이를 보완하기 위해 전역정보를 제공하는 카메라를 추가로 배치하여 상시 운용이 가능한 자율제어로봇으로 연구할 계획이다.