


1. 서 론
항공기, 선박 그리고 유도 미사일 등의 위치 및 자세정보는 관성항법장치(Inertial navigation system, INS)를 통해 획득된다. 관성항법장치는 3개의 가속도계와 자이로로 이루어진 관성센서 뭉치(Inertial measurement unit, IMU)를 Local-level frame(LLF)에 대해서 일정 자세를 유지하도록 하는 김블형 관성항법장치(Gimbaled INS, GINS)와 운용체의 동체에 완전 고정하여 사용하는 스트랩다운형(Strap down INS, SDINS)의 형태가 있다(Britting, 1971; Park et al., 1998).
관성항법 시스템은 잠수함, 항공기, 미사일 등에 장착하여 자기의 위치를 감지하여 목적지까지 유도하기 위한 장치이다. 동작원리는 자이로스코프에서 가속도를 구해 적분하여 속도를 구하고, 속도를 적분하여 이동한 거리를 구하는 것이다. 처음 있던 위치를 입력하면 이동해도 자기의 위치와 속도를 항상 계산해 파악할 수 있다. 악천후나 전파 방해의 영향을 받지 않는다는 장점을 가지지만 긴 거리를 이동하면 오차가 누적되어 커지므로 GPS(Global positioning system)나 액티브 레이더 유도 등에 의한 보정을 더해 사용하는 것이 보통이다(Garg, et al., 1978).
본 논문에서는 SDINS의 RLG(Ring laser gyro) 기반 ARS(Attitude reference system)에 대해 연구한다.
관성 시스템의 부분인 ARS의 자세 적분오차 누적문제를 지자기센서와 보완적으로 확장 칼만필터를 사용하여 RLG의 오차를 보정한다. ARS의 주 센서인 RLG의 오차를 줄이는 실험을 위해 Heading 자세의 변화를 줄 수 있는 회전형 테이블 형태의 실험장치를 제작하여 정지상태와 움직임 상태의 ARS알고리즘을 검증하였다. 또한 이를 실시간으로 계산하고 데이터를 수집하기 위한 임베디드 리눅스를 사용하는 원 보드 PC기반 센서 데이터처리 시스템도 함께 설계하였다.
2. ARS(Attitude reference system)
2.1 ARS 특성 분석
ARS는 자이로센서와 가속도센서 지자기 센서를 융합하여 각도를 추정할 때, 흔히 공간상의 3개 자세인 Roll, Pitch, Yaw를 측정하는 장치이다.
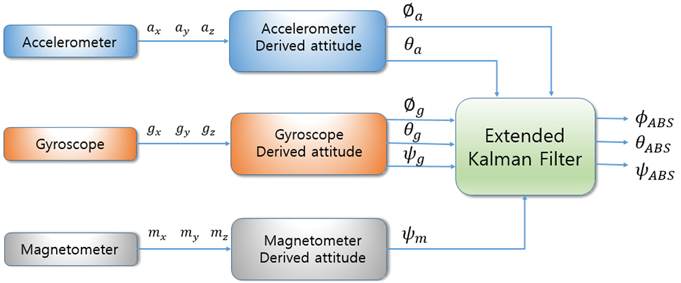
RLG를 이용한 ARS는 일반적으로 시간 증가에 따른 데이터의 적분오차 누적(Drift) 문제를 가지고 있다. 이러한 적분오차의 누적을 줄이기 위해서 본 논문에서는 확장칼만필터를 이용하여 자이로 데이터, 가속도 데이터 그리고 지자기 데이터를 모두 활용한다. 확장칼만필터를 이용하여 센서 데이터들의 적분오차 누적을 보정하는 구도를 Fig. 1과 같이 나타내었다.
Fig. 1은 RLG의 각속도를 오일러 각과 각속도 사이의 관계식을 이용하여 적분하고 적분된 Roll, Pitch, Yaw의 데이터를 확장 칼만필터를 이용하여 가속도 및 외부 지자기 데이터를 이용하여 보정하는 방법이다. 여기에서 같은 정보를 제공하는 자이로 센서와 지자기 센서를 같이 사용하는 이유는 각 센서들의 특성이 달라서 이들의 장단점을 실험을 통해 파악하여 잘 활용하고자 함이다(Yu, et al., 2012; Yu, et, al., 2014).
지자기센서로 부터의 Yaw각 데이터는 주변 Magnet field에 민감하여 큰 오차가 있고 주변 환경에 영향을 많이 받는다. 이의 특성을 파악하기 위해 본 연구에서는 지자기 센서의 성능을 시험하고 오차 특성을 분석하기 위해 지자기 센서 외에 자이로 및 가속도 센서의 특성파악이 가능한 시험장치를 구성하였다.
2.2 ARS 시험 장치 구성
ARS의 성능시험을 위해 만든 센서 시스템은 RLG, 가속도 센서정보를 제공하는 MEMS(Micro electro mechanical system)형 AHRS(Attitude and heading reference system), 그리고 지자기센서를 포함하는 센서 모듈을 구성하였다.
시험장치 데이터의 저장 및 연산은 임베디드 리눅스 프로세서를 사용하여 처리하였다. Fig. 2는 ARS의 구성을 다이어그램으로 나타냈다.
여기에서 AHRS, GPS, IMU의 센서의 데이터는 Fig 2에 나타낸 임베디드 리눅스에 이식된 알고리즘에 사용되며 연산처리 및 저장 된 결과 데이터는 RF 무선통신으로 데이터를 저장하는 컴퓨터로 보내진다. 각 센서들의 데이터를 추출하기 위해 모션을 제공하는 장치를 회전형 테이블 형태로 제작하였고 그 사진은 Fig. 3에 나타내었다.


회전형 테이블은 0.088°의 분해능을 갖는 서보모터를 적용하여 구성하였고 ARM-M4계열의 마이크로 컨트롤러를 사용하여 모터의 회전속도와 회전각을 정밀하게 제어하는 시스템을 구성하였다. 회전형 테이블의 제어시스템은 Fig. 4과 같이 구성하였다.

제작한 회전형 테이블을 이용하여 테이블 상단에 설치한 센서모듈의 성능시험을 하였다. 이 중에 지자기 센서의 데이터를 분석하였다. 지자기 센서를 정지 상태와 일정 각으로 반복회전시험을 한 결과 데이터를 그래프로 Fig. 5에 나타내었다.
Fig. 5에 나타난 바와 같이 지자기 센서의 반복회전 시험 결과 정지상태의 Heading 오차는 Fig 5(a)와 같이 최소 0.1°에서 최대 0.3°이며 Fig. 5(b)와 같이 일정 각 반복 시험(0~20도) 결과는 평균 2.4°이상의 오차를 나타내었다.

또한 10회의 단독 지자기 센서 시험에서 전체적인 오차는 위 그래프의 결과와 크게 벗어나지 않았지만 반복시행 시 주변 환경에 따라 미세하게 오차의 평균 범위가 달라졌다. 따라서 동작이 없는 상태에서의 지자기 데이터는 큰 오차를 나타내지 않지만 동작이 있는 시스템에서의 데이터는 신뢰성을 장담할 수 없으며 주변에 자력영향을 미치는 환경에서는 오차 값이 선형적이지 못하기 때문에 단독으로 사용하기에는 어렵다.
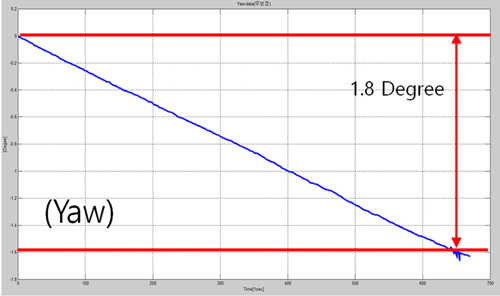
RLG는 주변의 자력환경에 영향을 받지 않는 큰 장점을 가지고 있는 반면 각속도 정보를 제공하므로 각정보를 얻기 위해서 적분을 해야 하는데, 이때 적분으로 인한 시간에 따라 누적오차가 발생한다. 본 시험에서 RLG의 회전동작 시험 결과를 각속도 데이터로 받아 오일러 각으로 변환하여 적분한 오일러 각 데이터를 Fig 6에 나타내었다. Fig 6은 정지상태에서 링 레이저 자이로의 각속도를 오일러 각으로 변환하여 적분한 값으로 약 10분 정도 시험 한 결과 적분오차의 누적으로 인하여 약 1.8도 정도의 Drift가 발생하였다.
지자기센서는 자력환경에 매우 취약하기 때문에 초기 Yaw각 정보를 제공하는 센서로 사용하고 RLG 센서를 기반으로 하는 ARS를 구성하고 센서 데이터들을 확장 칼만 필터로 처리하는 시스템을 설계하였다. 이를 위해 확장 칼만필터 알고리즘을 다음과 같이 구성하였다. 본 시스템에서 확장 칼만 필터의 상태변수는 x = [ϕ θ ψ]T 로 나타내었다. 그리고 시스템 모델은 자이로 가속도와 오일러각 사이의 관계식을 식 (1)과 같이 나타내었다(Chung, et al., 1991).
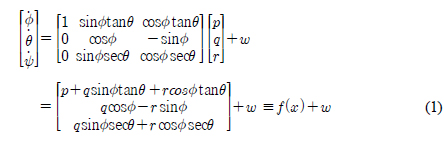
위 식에서 비선형함수인 f(x)는 칼만필터에 적용할 수 없으므로 식 (1)의 f(x)를 각각의 상태변수에 대해 편미분하여 자코비안을 식 (2)과 같이 구한다.
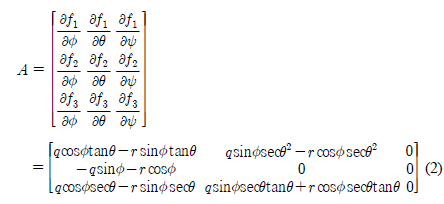
칼만 필터는 이산시간에 대한 알고리즘이다. 따라서 식 (2)을 이산화 하면 시스템 행렬 A는 식 (3)과 같다.

식 (3)에서 dt는 샘플시간이며 I는 항등행렬(Identity matrix)이다. 보정 값인 가속도 및 지자기 데이터는 식 (4)와 같이 계산된다.

여기서 

식 (4)에서 ϕ, θ는 가속도에서 근사적으로 계산하였고 실제 위와 같은 방법으로 계산한 ϕ, θ는 오차가 크다. 또한 지자기 데이터(Mag)를 이용하여 보정데이터 ψ를 구하는데 사용된 식 (5)의 의미는 측정된 지자기 데이터에서 처음 측정된 데이터를 빼주면 지자기데이터의 각도의 변화량만을 구할 수 있다는 것이다. 지자기 데이터의 각도 변화량을 이용하여 RLG의 적분오차를 포함한 데이터 ψ를 보정한다.
다음으로 측정 모델식(z)는 보정용 측정값이 가속도데이터와 지자기데이터로부터 식 (6)과 같이 계산되어 상태변수 3가지를 모두 측정 할 수 있다. 따라서 식 (6)와 같이 나타낼 수 있다.

식 (6)은 측정값이 있는 선형식으로 자코비안을 구하지 않아도 된다.
식 (1)~(6)을 통해 확장 칼만 필터에 사용될 시스템 설계 및 행렬을 모두 구하였고 이를 칼만 필터의 계산 순서에 적용하여 Fig. 7과 같은 순서로 계산을 수행 하면 된다.
Fig. 7에서 시스템 잡음 공분산과 측정 잡음 공분산인 Q, R 행렬은 신호특성 및 RLG의 특성을 정확하게 계측 할 수 있는 장비가 있어야 실제에 가깝게 계측할 수 있지만 계측장비가 상당한 고가이기 때문에 Q, R 행렬을 설계 인자로 보고 성능의 추이를 관찰하며 결정하였다. 그리고 Fig. 7은 칼만 필터를 계산하는 순서를 표현한 그림으로 선형칼만 필터를 나타내고 있다. 하지만 확장 칼만 필터의 계산 순서는 선형 칼만 필터와 비슷하다. 내부적으로는 선형화 기준점이 직전의 추정값을 기준으로 계산하고 계산 순서는 시스템 모델과 측정 모델의 비선형식을 자코비안으로 선형 근사화 과정의 차이가 있다.

2.3 Size Effect 오차
이상적인 시스템의 경우에 모든 센서의 측정위치는 한 점에서 이루어 져야 하지만 현실적으로는 동일점에 있을 수 없다. 동체가 회전할 때 이러한 중심위치로부터의 가속도계의 위치 Offset은 구심 가속도를 생성시키므로 위치 오차를 유발하며 이러한 현상을 size effect라하고 발생되는 구심 가속도의 크기는 식 (7)과 같이 계산하여 제거하여야 한다(Lim, et al., 2013).

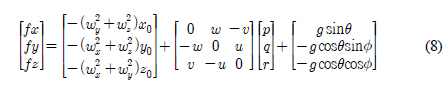
식 (7)에서 ax, ay,az는 구심 가속도, wx, wy, wz는 각속도, x0, y0, z0는 중심위치로 부터의 Offset거리이다. 계산된 Size Effect 오차는 식 (4)에 적용하여 식 (8)과 같이 계산하고 실제 항법에서 작은 수중 운동체의 경우 위의 Size effect오차는 미미하여 무시할 수 있으나 잠수함과 같이 대형 수중 운동체의 경우 항법오차의 큰 요인이 된다.
3. ARS의 실험 및 고찰
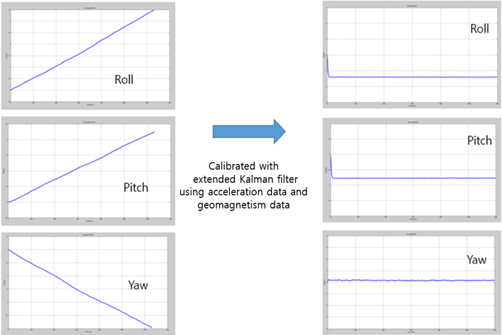
Fig. 3의 장치를 사용하여 보정하지 않은 정지 상태에서의 적분오차와 보정알고리즘을 이용한 보정 데이터를 실험을 통해 실제 취득한 데이터를 이용하여 검증하였다. 실험 조건은 100Hz의 샘플링 타임으로 데이터를 측정하여 약 21분간 126,400개의 데이터를 Fig. 8과 같이 그래프로 나타내었다.
Fig. 8에서 왼쪽에 위치한 3개의 그래프는 RLG 데이터 단독으로 오일러각 변환을 하여 적분한 그래프로 약 20분 동안 약 2.4도~3.7도 까지 Drift가 발생하였다. 하지만 확장 칼만필터를 사용하여 보정 후 Drift는 거의 발생하지 않았다. Roll과 Pitch각에 각각 발생한 0.3도, 1.2도의 Offset은 RLG를 고정하는 기구와의 오차이다.
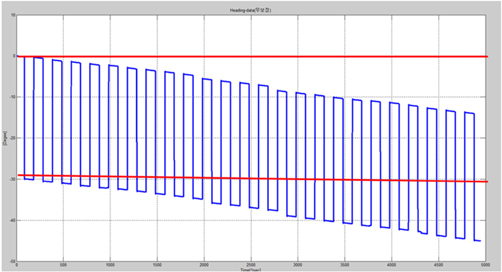
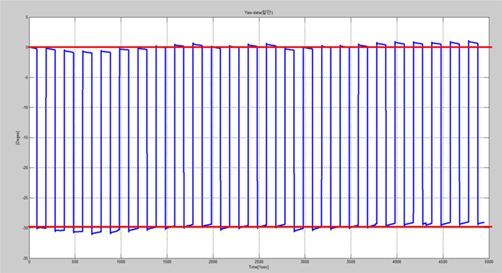
다음으로 자세를 일정하게 반복하여 정역으로 회전하여 자세의 오차를 확인하는 시험을 실시하였다. Fig. 2의 시험 장치를 이용하여 일정시간 동안 0 ~ -30°구간을 왕복 회전하는 실험을 실시하였고 실험 조건은 100Hz의 셈플링 타임으로 약 83분간 약 500,000개의 데이터를 받아 Fig. 9~10의 그래프로 나타내었다.
Fig. 9에 나타난 것과 같이 보정되지 않은 Yaw 데이터는 0 ~ −30°를 약 83분 반복 회전하는 동안 약 12°이상의 Drift 오차를 나타냈다. 또한 아래 Fig. 10은 보정용 데이터로 사용되는 지자기 데이터 그래프이다. 그래프에 나타난 것처럼 적분을 하지 않기 때문에 Drift 오차는 없었지만 0 ~ −30°를 약 83분 반복 회전하여 6 ~ 7°의 측정 오차를 가짐을 보여준다.
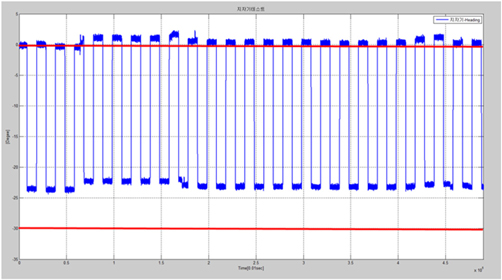
Fig. 9와 Fig. 10의 데이터를 확장 칼만 필터를 이용하여 융합한 결과 Fig. 11과 같은 결과를 얻었다. Fig. 11의 그래프를 분석해 보면 테스트 장치인 회전 테이블에 적용한 서보모터의 분해능과 관성으로 인해 위치 시작점과 마지막 위치에서의 미세한 오차가 존재하였다. 이는 결과적으로 미소한 차이의 위치 오차를 만들었다. 따라서 Fig. 11과 같이 시작점의 위치와 마지막위치에서 약간의 오차를 나타냈지만 전체 실험에서의 결과는 0 ~ −30°를 Fig 9와 Fig. 10보다 정확히 추종하였으며 약 83분의 시험시간 동안 발산하지 않아 제안한 알고리즘의 우수한 성능을 확인할 수 있다.
4. 결 론
본 논문은 링 레이저 자이로를 이용한 ARS에 대한 연구내용을 기술하였다. RLG를 이용한 ARS의 가장 큰 문제인 시간에 따른 데이터의 적분오차 누적을 줄이기 위해 확장 칼만 필터를 이용하였다. 그리고 이것을 이용하여 자이로 데이터, 가속도 데이터, 그리고 지자기 데이터들의 융합을 통해 보정하여 Yaw각의 적분오차를 효율적으로 제거하는 이론을 연구하고 이를 실험적으로 구현하였다.
Turn table 실험을 통해 보정 전의 적분오차 누적량은 약 한시간 20분의 시험결과 12도 이상 발생하였다. 이를 보정하기 위한 지자기 데이터 또한 측정 오차가 6~8도 이상 발생 하였다.
자이로 데이터와 지자기 데이터를 확장 칼만 필터로 보정 한 결과 한 시간 이상의 시험에서 약 0.2~0.4도의 작은 자세오차를 구할 수 있었다. 이 오차 또한 Heading각 시험장치의 기구부 요인에 의해 발생 된 것으로 추정되어 된다.
추후 완전한 수중 항법 시스템 연구를 위해 DVL과 USBL 같은 센서를 활용하여 수중 네비게이션 시스템을 연구할 계획이다.




