


1. 서 론
최근 수중 구조물 및 기술의 증가로 인하여, 무인잠수정(UUV, Unmanned underwater vehicle)은 수중 항해뿐만이 아니라 수중 구조물의 관리 및 보수, 설치에 이르는 다양한 임무를 수행하게 되었다. 이에 따라 무인잠수정은 구조화되고 복잡한 공간에서의 장시간의 임무 수행에도 정확한 위치 추정 기술이 요구된다. 하지만, 수중 구조화된 환경에서 장시간 위치 추정 성능을 유지하는 것은 매우 어려운 일이다(Paull et al., 2014; Marani and Choi, 2010).
수중 위치 추정시스템은 크게 무인 잠수정 내부의 관성항법 시스템(Inertial navigation system)을 이용한 위치 추정시스템과 GPS(Global positioning system)와 무인 잠수정 외부에 설치된 센서를 이용한 위치 추정 시스템(Earth-fixed reference frame)으로 나눌 수 있다. 하지만 관성항법시스템의 경우 Dead-reckoning 오차 및 미끄러짐(Drift)으로 인하여 장시간 이용 시 무인잠수정 위치추정의 신뢰도가 떨어진다(Li et al., 2013b; Karimi et al., 2013). 이를 극복하기 위하여, 외부 위치 추정 시스템을 사용할 수 있으나, GPS의 경우, 수중에서 신호 수신이 불가능하기 때문에 Mother ship이나 로봇의 부상이 필요하며, 소나를 이용한 Based line system의 경우 느린 전파속도, 다중신호효과(Multi-path effect) 때문에 구조화된 공간에서 사용하기 어렵다(Kinsey et al., 2005; Akyildiz et al., 2005; Elibol et al., 2016).
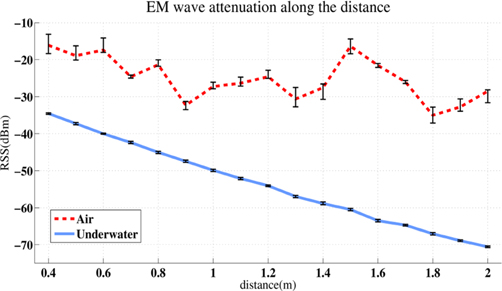
위에서 언급한 문제들을 해결하기 위하여, 우리는 거리에 따른 전자기파의 신호감쇠를 이용하여 거리를 추정하는 방법(Range estimation scheme using received signal strength of electromagnetic wave)을 제안하였다. 이 방식은 공기 중의 위치 추정을 위하여 많이 사용된 방법이었으나, Fig. 1과 같이 수중에서의 거리에 따른 급격한 신호 감쇠 때문에 수중에서 사용되지 않았다. 하지만 수중 환경에서의 전자기파는 공기 중과 달리 주변 환경에 의한 영향이 적고, 분해능이 좋으며, 빠른 전파속도를 이용한 높은 샘플링 속도(Sampling rate)을 가지기 때문에 복잡하고 빠른 물체의 위치 추정에 적합하다고 할 수 있다(Park et al., 2016b).
수중환경에서의 전자기파 신호감쇠를 이용한 위치 추정을 위하여, 저자는 수중에서의 전자기파 감쇠 특성을 분석하고 거리에 따른 전자기파 감쇠 모델을 제안하였으며(Park et al., 2016a; Park et al., 2013), 주파수 할당방식과 수중 무선 센서네트워크(Underwater wireless sensor network)를 이용하여 짧은 센서 사용 범위와 센서 식별 문제(Signal source identification problem)를 해결하였다. 이를 이용하여 수중환경에서 RF(Radio frequency) 센서가 빠르고 정밀하게 위치 추정하는 것을 확인할 수 있었다(Park et al., 2015; Park et al., 2012).
본 논문에서는 전자기파의 감쇠를 이용한 거리측정 센서 및 위치 추정시스템과 기존 무인잠수정의 관성항법시스템을 융합한 위치추정방법 설계 및 실험을 소개하고자 한다(Fig. 2). 무인잠수정의 관성항법시스템은 관성측정장치(Inertial measurement unit), AHRS(Attitude and heading reference system), 깊이센서 및 DVL(Doppler velocity log) 등으로 이루어지게 되며, 얻어지는 가속도 및 속도 정보를 이용하여 무인잠수정의 위치 및 자세를 예측하게 된다. 관성항법시스템으로 인한 위치오차를 교정(Correction)하기 위하여, 위치를 추정하고자 하는 중요 목표 지역(예; 도킹 영역, 주요 시설물 주변)에 전자기파 센서를 이용한 수중 무선센서네트워크를 구축하고, 그림 2에서와 같이 무인잠수정이 RF 센서 주변에 있을 경우 위치 보정을 한다. 이러한 위치 예측과 보정은 EKF(Extended Kalman filter) 구조로 무인잠수정의 운용 중 반복적으로 진행한다. 이를 통하여 무인잠수정은 구조화된 공간에서도 누적오차 없이 위치 수행이 가능하다.

본 논문에서는 RF 센서와 관성항법시스템을 함께 이용하여 무인잠수정의 위치 추정을 수행하였다. 2장에서는 제안하는 수중 위치 추정시스템에 대해서 자세하게 알아보고, 3장에서는 사용한 센서 및 센서모델, 실험환경 구성에 대해서 살펴보았다. 4장에서는 실험 및 결과에 대해서 이야기 하였으며, 마지막으로 5장에서는 요약 및 결론으로 향후 방향을 제시하였다.
2. RF 센서와 관성항법시스템을 이용한 위치 추정 시스템
본 장에서는 RF 센서와 관성항법시스템을 이용한 위치 추정 시스템을 위하여, 좌표계 및 심벌(Symbol) 정의, EKF 구조, 예측 단계와 보정 단계에서의 역할, 거리센서 모델에 대해서 소개하고자 한다.
2.1 3차원 좌표계 및 자세정보 정의
시스템 설명에 앞서, 3차원 좌표계(3D coordinate) 환경에서의 위치와 자세정보를 정의하고자 한다. 무인잠수정이 3차원 수중 환경에서 운용될 때, 로봇의 위치와 자세를 나타내는 글로벌 자세(Global state) 벡터 nx와 로컬 자세(Local state) 벡터 bx는 3차원 유클리디안 공간에서의 대칭 그룹(Three-dimensional euclidean group: E(3))에서 정의된다(Thurston and Levy, 1997). 시간 t에서 의 로봇 자세는 위치 부분을 나타내는 위치 벡터 rt와 오일러 각도(Euler angle vector) Λt로 나타낼 수 있으며, 이러한 자세는 아래 식 (1)과 Fig. 3과 같이 정의된다.

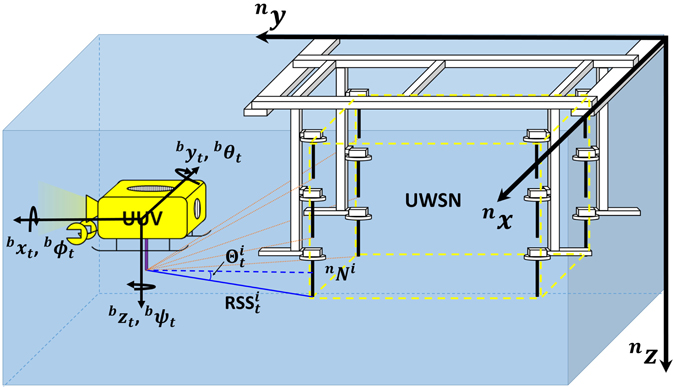
 은 시간 t에서 i번째 고정된 노드(anchor node, AN: 미리 지정된 위치에 설치된 센서)로부터 송신된 신호가 모바일 노드(Mobile node, MN: 위치 추정하고자 하는 목표물체)에서 수신되었을 때, 전자기파의 수신세기(RSS)를 의미한다. 또한
은 시간 t에서 i번째 고정된 노드(anchor node, AN: 미리 지정된 위치에 설치된 센서)로부터 송신된 신호가 모바일 노드(Mobile node, MN: 위치 추정하고자 하는 목표물체)에서 수신되었을 때, 전자기파의 수신세기(RSS)를 의미한다. 또한  는 i번째 고정된 노드와 모바일 노드 사이의 상하각(Elevation angle)을 의미하며, 차후에 센서 모델 및 유효한 신호를 구분하는데 사용된다(Park et al., 2016a).
는 i번째 고정된 노드와 모바일 노드 사이의 상하각(Elevation angle)을 의미하며, 차후에 센서 모델 및 유효한 신호를 구분하는데 사용된다(Park et al., 2016a).2.2 확장 칼만필터 기반 무인잠수정 위치추정 시스템
무인잠수정의 관성항법시스템과 RF 센서와의 센서융합을 위하여, 확장 칼만필터 기반으로 위치 추정시스템을 설계하였다. 칼만필터는 예측구간(Prediction phase)와 교정구간(Correction or update phase)으로 구분되며, 두 구간을 시간의 흐름에 따라 반복적으로 진행함으로써, 무인 잠수정의 위치를 추정할 수 있다.
예측구간에서 무인잠수정은 위치의 추정값(Position probability)  과 자세의 추정값(Orientation probability)
과 자세의 추정값(Orientation probability)  을 무인잠수정 내부의 센서(DVL, IMU, AHRS, Depth sensor)와 이전 step의 위치자세 정보 (nrt−1, nΛt−1)를 이용하여 예측한다.
을 무인잠수정 내부의 센서(DVL, IMU, AHRS, Depth sensor)와 이전 step의 위치자세 정보 (nrt−1, nΛt−1)를 이용하여 예측한다.
과 자세의 추정값(Orientation probability) 을 무인잠수정 내부의 센서(DVL, IMU, AHRS, Depth sensor)와 이전 step의 위치자세 정보 (nrt−1, nΛt−1)를 이용하여 예측한다.교정구간은 무인잠수정이 RF 센서로 구성된 수중무선센서네트 워크 안에 속할 경우에만 진행된다. 수중 무선 모바일 노드에서 수신되는 유효한 RSS의 개수가 3개 이상일 때, 얻어지는 RSS를 센서 모델을 이용하여 거리 값으로 변환 후 삼변측량(Trilateration) 기법을 이용하여 위치를 추정하게 된다. 이 위치 정보는 위치 추정값 을 칼만 가중치에 따라서 보정하며, 위치 nrt를 구한다. 예측구간과 보정구간의 자세한 설명은 아래 장에 설명하였다(Thrun et al., 2005; Djugash et al., 2006; Menegatti et al., 2009).
을 칼만 가중치에 따라서 보정하며, 위치 nrt를 구한다. 예측구간과 보정구간의 자세한 설명은 아래 장에 설명하였다(Thrun et al., 2005; Djugash et al., 2006; Menegatti et al., 2009).2.3. 예측 구간
예측 구간에서, 위치 및 자세 추정값(, )은 무인잠수정 내부의 센서로부터 얻는다. 본 논문에서 사용된 무인잠수정의 관성항법시스템은 무인잠수정 설계 논문(Li et al., 2013a; Won et al., 2015) 을 참고하였다.
, )은 무인잠수정 내부의 센서로부터 얻는다. 본 논문에서 사용된 무인잠수정의 관성항법시스템은 무인잠수정 설계 논문(Li et al., 2013a; Won et al., 2015) 을 참고하였다.위치추정 시간 t에, 와 은 이전 시간 t − 1에서의 위치 자세 정보(nrt−1, nΛt−1)와 무인잠수정 내부의 센서로부터 아래와 같이 계산된다.
와 은 이전 시간 t − 1에서의 위치 자세 정보(nrt−1, nΛt−1)와 무인잠수정 내부의 센서로부터 아래와 같이 계산된다.
여기서 vt는 예측과정에서 생기는 오차로서 관성항법시스템의 오차로 볼 수 있다(Li et al., 2012). 관성항법시스템에서 얻어지는 위치정보는 무인잠수정 프레임 상에서의 위치이므로, 이를 글로벌 좌표계로 얻기 위해서는 아래와 같은 계산이 필요하다.

여기서,  와
와  는 무인잠수정과 글로벌 좌표계간의 좌표변환 행렬이며 아래와 같이 나타낼 수 있다.
는 무인잠수정과 글로벌 좌표계간의 좌표변환 행렬이며 아래와 같이 나타낼 수 있다.
와 는 무인잠수정과 글로벌 좌표계간의 좌표변환 행렬이며 아래와 같이 나타낼 수 있다.

여기서 s, c, t는 각각 sin, cos, tan를 의미한다.
2.4. 수중 무선 센서 네트워크 기반 보정 구간
수중 무선 센서 네트워크를 목표 위치추정 영역에 설치할 때, 고정된 노드간의 주파수 할당(Frequency allocation) 정보 및 글로벌 좌표계에서의 위치 정보는 서로 공유한다. 또한 고정된 노드와 모바일 노드간의 높이차이(θ)에 따라 센서의 사용범위 및 위치추정 성능이 변화하게 되므로, 고정된 노드들은 X − Y축으로 층(Layer)을 이루게 되며, 각각의 층들은 적당한 높이 차이를 유지할 수 있도록 설치한다.
무인잠수정 운용 중, 각각의 고정된 노드는 할당된 고유 주파수로 전자기파를 송신하며, 모바일 노드는 수신이 가능한 주파수와 그때의 전자기파 세기를 수신한다. 수신된 신호 중에서 신뢰성 있는 전자기파를 구분하기 위하여, 모바일 노드는 깊이 센서 및 이전 단계의 위치정보를 이용하여 각각의 고정된 노드와의 상하각을 구하고, 이 상하각이 기준 값인 HPBW(Half power beam width) 보다 작은 값만을 위치 추정에 사용한다. 모바일 노드는 위치 정보를 업데이트 한다.
이렇게 얻어지는 전자기파의 숫자가 세 개 이상일 때, 각각의 고정된 노드 n Ni와 모바일 노드 간 얻어지는 전자기파의 수신 세기 는 센서 모델을 통하여 거리 정보  로 변환할 수 있다(2.5절). 이때 모바일 노드는 수신된 전자기파의 주파수를 통하여 어느 고정된 노드로부터 신호가 수신되었는지 확인하며, 이렇게 얻어지는 거리 정보들을 삼변측량을 이용하여 모바일 노드 위치를 추정하며, 이를 칼만 필터를 이용하여 이전에 예측된 위치를 보정함으로써, 무인잠수정의 위치를 추정할 수 있다. RF 센서를 이용한 위치 보정과정은 위의 알고리즘 1을 통하여 볼 수 있다.
로 변환할 수 있다(2.5절). 이때 모바일 노드는 수신된 전자기파의 주파수를 통하여 어느 고정된 노드로부터 신호가 수신되었는지 확인하며, 이렇게 얻어지는 거리 정보들을 삼변측량을 이용하여 모바일 노드 위치를 추정하며, 이를 칼만 필터를 이용하여 이전에 예측된 위치를 보정함으로써, 무인잠수정의 위치를 추정할 수 있다. RF 센서를 이용한 위치 보정과정은 위의 알고리즘 1을 통하여 볼 수 있다.
는 센서 모델을 통하여 거리 정보 로 변환할 수 있다(2.5절). 이때 모바일 노드는 수신된 전자기파의 주파수를 통하여 어느 고정된 노드로부터 신호가 수신되었는지 확인하며, 이렇게 얻어지는 거리 정보들을 삼변측량을 이용하여 모바일 노드 위치를 추정하며, 이를 칼만 필터를 이용하여 이전에 예측된 위치를 보정함으로써, 무인잠수정의 위치를 추정할 수 있다. RF 센서를 이용한 위치 보정과정은 위의 알고리즘 1을 통하여 볼 수 있다.
2.5. 거리 센서모델
전자기파의 신호 세기를 이용하여 노드간의 거리를 추정하기 위해서는 수신부에서 얻어지는 전자기파 세기를 거리 정보로 변환하여야 한다. 공기 중에서의 거리에 따른 전자기파 세기는 Friis 전송 공식(Friis transmission formula)를 이용하여 변환할 수 있다(Friis and Rumson, 1971). 하지만 이 거리 모델은 매질이 진공 또는 진공에 준하는 공기로 가정하기 때문에 물과 같이 신호의 흡수 및 감쇠가 큰 매질에서는 이를 적용할 수 없다. 그러므로 수중에서 전자기파의 감쇠 모델을 얻기 위해서는 새로운 거리 모델이 필요하다.
이를 위해서 저자는 기존의 Friis 전송 공식과 매질에서의 Maxwell 감쇠 상수(Maxwell’s attenuation constant formula)을 이용하여 특정 매질에서의 거리에 따른 감쇠 모델을 제시하였었다(Balanis, 2012; Park et al., 2016a). 이 식에서, 시간 t때 고정된 노드 i와의 거리()에 따른 수신 전자기파 세기()는 감쇠 상수(α)를 이용하여 아래와 같이 나타낼 수 있다.
)에 따른 수신 전자기파 세기()는 감쇠 상수(α)를 이용하여 아래와 같이 나타낼 수 있다.
여기서 Γi는 거리 및 전자기파 송수신 거리와 상관없이 안테나와 환경에 의해서 결정되는 상수, e는 자연 상수를 나타낸다. Γi는 아래와 같이 나타낼 수 있다.

여기서 PLE는 각 안테나간의 편광각, GT는 송신안테나 이득(Gain), GR은 수신안테나의 이득, f는 주파수(Frequency), n은 굴절율(Refractive index), w는 알려지지 않은 추가적인 감쇠요인(임피던스 부적합, 동축케이블 손실 등)을 나타낸다.(Park et al., 2012).
3. 실 험
제안된 전자기파의 감쇠를 이용한 위치 추정기법을 검증하기 위하여, 다음과 같이 공학수조에 실험환경을 구성하였다.
3.1 실험 환경
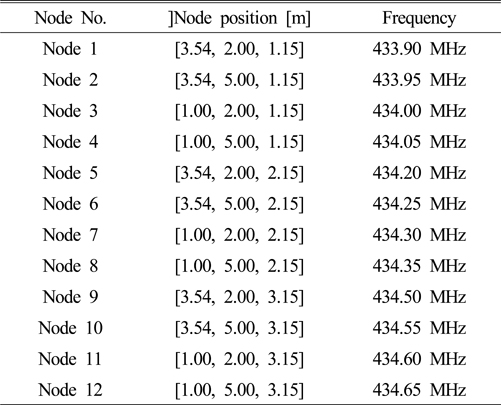
우리는 제안된 위치 추정 시스템을 검증하기 위하여 KIRO(Korea Institute of Robot and Convergence)의 지하수조(가로 12m, 세로 8m, 깊이 6m의 민물 수조)에 Fig. 4와 같은 실험 환경을 구축하였다. 센서네트워크는 가로 2.5m, 세로 3m에 고정된 노드 12개로 구성되었으며, 알루미늄 프레임을 이용하여 각 노드들을 고정하였다. 12개의 고정된 노드들은 수중 무선센서네트워크의 각 모서리 및 꼭짓점에 설치되었으며, 고유의 할당된 주파수로 전자기파를 송신하였다. 각각의 고정된 노드 위치와 주파수는 Table 2와 같다.

3.2 센서 제작
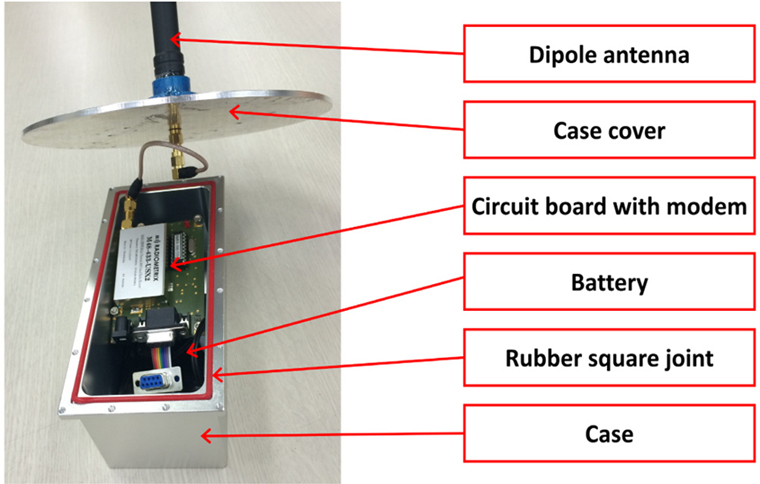
상용품인 RF 모듈을 수중에서 고정된 노드로 사용하기 위하여 Fig. 5와 같이 수중 무선 센서를 제작하였다. 이 센서는 센서 케이스 및 안테나, 모듈, 배터리로 구성되어 있으며, 센서의 크기는 180mm(W)×180mm(L)×500mm(H)이다. 안테나의 전 방향성(Omni-directional) 전파특성을 유지하기 위하여 케이스 뚜껑은 원형으로 설계되었으며, 방수를 위하여 고무 조인트(Rubber joint) 및 그리스(Grease)를 이용하였다. 회로 및 모듈은 Radiomatrix사의 USX2를 사용하였으며, 센서의 안테나는 3dBi 전방향성 상용 안테나를 사용하였다. 자세한 센서 사양은 표 2과 같다.
센서의 위치 추정성능을 확인하기 위하여, 모바일 노드는 National Instruments사의 Signal analyzer와 동축케이블을 이용하여 연결하였다. 동축케이블은 실리콘 호스를 이용하여 방수처리 하였으며, 모바일노드는 1kHz의 샘플링 주기로 고정된 노드로부터 신호를 수신하여 스스로의 위치를 추정하였다.
3.3 거리 센서모델 설계
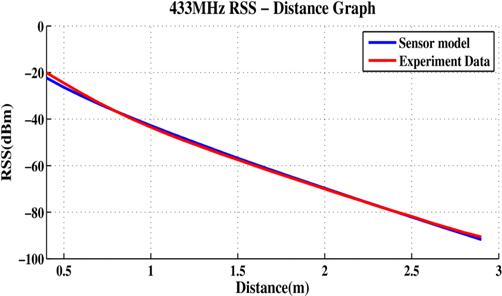
고정된 노드로부터 얻어진 전자기파 세기로부터 거리 정보를 얻기 위해서, 저자는 2.5절에서 구한 거리 센서모델을 실험환경에서 검증하였다. 센서모델에 사용된 환경 계수 및 안테나 정보는 Table 3와 같다. 저자는 Table 3의 환경 계수를 식 (6), (7)에 대입함으로서, 아래와 같은 거리 센서모델을 얻을 수 있었다.

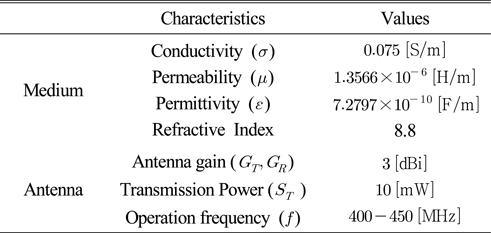
얻어진 거리 센서모델의 성능을 검증하기 위하여, 실험을 통하여 거리에 따른 RSS 값을 얻은 후, Fig. 6과 같이 센서모델과 비교하였다. 실험결과 거리 센서모델은 실험 결과와 거의 동일함을 확인할 수 있었다.
3.4 실험 과정
무인잠수정의 관성항법시스템과 관성항법 및 RF 센서와의 센서융합 성능을 비교함으로써, 제안된 위치추정 시스템의 성능을 검증하였다. 이 실험에서 무인잠수정의 위치는 무인잠수정 운용자가 임의로 10-15분 동안 운용하였으며, 처음 위치로 회귀하였다. 관성항법시스템과 RF 센서는 무인잠수정의 위치를 추종하였으며, 위치 추정 결과를 비교하였다.
3.5 실험 결과
Fig. 7은 관성항법시스템의 위치추정결과와 관성항법 및 RF 센서를 융합한 위치추정결과를 나타낸다. Ground-truth 정보를 얻기 어려운 환경이기 때문에, 절대적인 위치 추정 결과 비교는 어려웠다.

관성항법만을 사용한 위치 추정결과는 Dead-reckoning 오차와 센서의 발산 때문에 신뢰하기 어려운 위치추정 결과를 얻을 수 있었다. 결과적으로 위치 추정 시작점과 종료점사이의 거리가 매우 크게 나타났다.
반면에, 관성항법과 RF 센서를 동시에 사용함으로써, 무인잠수정이 수중 무선 센서 네트워크에 가까워질 때마다 Dead- reckoning 에러가 보정되는 것을 확인할 수 있었으며, 빠른 샘플링 속도 덕분에 관성항법의 발산에도 정확한 위치 추정결과를 얻을 수 있었다. 결과적으로 위치추정 시작점과 종료점이 거의 일치함을 확인할 수 있었다.
4. 결 론
본 논문에서, 우리는 수조와 같은 구조화된 공간에서의 정밀한 위치 추정 및 관성항법시스템의 발산을 방지하기 위하여 전자기파의 감쇠를 이용한 위치추정시스템을 제안하였다. 제안된 RF 센서는 수중 무선센서 네트워크를 구성하고, 관성항법시스템과 칼만필터 구조를 이루며 위치를 보정하며, 이를 이용하여 근접한 무인잠수정의 위치를 보정하였다. 제안된 위치추정 시스템은 관성항법 시스템만을 이용한 위치추정결과와 비교하였으며, 이를 통하여 구조화된 공간에서 장시간의 위치추정에 적합함을 검증하였다.
다만, 실제 어플리케이션을 위해서는 보다 많은 연구가 필요 할 것이다. 먼저, 무선센서네트워크의 장시간 유지를 위한 방법으로 AN의 유선화 또는 절전모드(Sleeping protocol) 등의 센서 설계가 필요할 것이며, 보다 넓은 양각에서 사용하기 위한 안테나 설계가 요구된다. 또한 해수 환경에서 사용하기 위한 적절한 주파수 검증이 선행되어야 할 것이다.




