


1. мДЬ л°†
мИШм§СмЧРмДЬмЭШ мЬДмєШ мґФм†ХмЧРлКФ мИШмГБмЧРмДЬмЩАлКФ лЛђл¶ђ нКємІХм†Р(Landmark лШРлКФ Feature)мЭі м†ЬнХЬм†БмЬЉл°Ь мВђмЪ©лРЬлЛ§. мЭілЯђнХЬ мЭімЬ†л°Ь мИШм§СмЧРмДЬ мЬДмєШ мґФм†Х мЛЬ, нКємІХм†РмЭД лґАлґДм†БмЬЉл°Ь мЭімЪ©нХШл©∞ мЖНлПДмЩА мЮРмДЄл•Љ мВђмЪ©нХШлКФ мґФмЄ°нХ≠л≤Х(Dead reckoning)мЭі к∞АмЮ• лІОмЭі мВђмЪ©лРЬлЛ§(Ko and Kuc, 2015; Ko et al, 2015). мґФмЄ°нХ≠л≤ХмЭД мЭімЪ©нХЬ мЬДмєШ мґФм†ХмЭА мЮРмДЄ м†Хл≥імЭШ мШБнЦ•мЭД нБђк≤М л∞ЫкЄ∞ лХМлђЄмЧР мЮРмДЄ мґФм†Х л∞©л≤ХмЭі м§СмЪФнХЬ мЪФмЖМл°Ь мЮСмЪ©лРЬлЛ§(Ko et al., 2016a; Ko and Jeong, 2016).
мЮРмДЄлКФ к∞АмЖНлПДмЩА мЮРкЄ∞мЮ•мЭД мЄ°м†ХнХШмЧђ к≤АмґЬк∞АлК•нХШл©∞, мЮРмДЄ мґФм†Х л∞©л≤ХмЭА к≥ДмВ∞лРЬ мЮРмДЄл•Љ мВђмЪ©нХШмЧђ мґФм†Х мГБнГЬл≥АмИШл•Љ л≥ім†ХнХЬлЛ§. мЮРкЄ∞мЮ• к∞ТмЭА м∞Єк∞ТмЧР нОЄм∞®к∞А мґФк∞АлРШмЦі мЄ°м†ХлРЬлЛ§. нОЄм∞®к∞А нПђнХ®лРЬ мЮРкЄ∞мЮ• мЄ°м†Хк∞ТмЭД мВђмЪ©нХШмЧђ к≥ДмВ∞лРЬ yawк∞ТмЭі л≥ім†ХлЛ®к≥ДмЧРмДЬ мВђмЪ©лРЬлЛ§. кЈЄлЯђлѓАл°Ь мҐА лНФ м†ХнЩХнХЬ мЮРмДЄмґФм†ХмЭД мЬДнХШмЧђ мЄ°м†ХлРЬ мЮРкЄ∞мЮ•мЧРмДЬ нОЄм∞®л•Љ л≥ім†ХнХЬ нЫД yawк∞БмЭД к≥ДмВ∞нХШмЧђмХЉ нХЬлЛ§(Ko et al., 2016c). yawк∞БмЭШ мЄ°м†Х мШ§м∞®к∞А м†БмЦімІАл©і мґФм†ХлРШлКФ Yawк∞БмЭШ мШ§м∞®лПД м§ДмЦілУ§к≤М лРШк≥†, мЭімЧР лФ∞лЭЉ мґФм†ХлРШлКФ Rollк≥Љ Pitchк∞ТмЭШ м†ХнЩХмД±мЭА нЦ•мГБлРЬлЛ§. м¶Й, нОЄм∞® мґФм†ХмЭД нЖµнХШмЧђ мҐЛмЭА мД±лК•мЭД к∞АмІД мЮРмДЄ мґФм†ХмЭі к∞АлК•нХШк≤М лРШк≥†, мЭілКФ мЬДмєШ мґФм†ХмЭШ мД±лК•мЭД нЦ•мГБмЛЬнВ§лКФлН∞ лПДмЫАмЭі лРЬлЛ§(Ko et al., 2016b).
мВђмЪ©нХШлКФ мДЉмДЬлУ§ м§С AHRS(Attitude and heading reference system)мЭШ мЮРкЄ∞мЮ• мДЉмДЬлКФ к∞Ал≤ЉмЪі лђік≤М, лЖТмЭА мЛ†лҐ∞мД±, лВЃмЭА м†Д놕мЭД мЪФкµђнХЬлЛ§. кЈЄлЯђлВШ мЮРкЄ∞мЮ• мДЉмДЬк∞А мІАкµђмЮРкЄ∞мЮ•мЭД м†ХнЩХнХШк≤М мЄ°м†ХнХШмІА л™їнХЬлЛ§(Kim et al, 2006). мЫРмЭЄмЬЉл°ЬлКФ Hard iron нЪ®к≥Љ, Soft iron нЪ®к≥Љ, нЩШмВ∞к≥ДмИШмШ§м∞®(scale factor error), мЄ°м†Х мґХ м†Хл†ђмШ§м∞®лУ§мЭі мЮИмЬЉл©∞ л≥Є мЧ∞кµђмЧРмДЬлКФ кЈЄм§СмЧРмДЬ к∞АмЮ• нБ∞ мЫРмЭЄмЬЉл°Ь мЮСмЪ©нХШлКФ Hard iron нЪ®к≥ЉмЧР мЭШнХі л∞ЬмГЭнХШлКФ нОЄм∞®л•Љ мґФм†ХнХЬлЛ§.
кЄ∞м°імЭШ нОЄм∞® мґФм†Х л∞©л≤ХмЭА Twostep, Centering, мµЬмЖМмЮРмКєл≤Х, нЩХмЮ• мєЉлІМ нХДнД∞(Extended Kalman filter)лУ§мЭі мЮИлЛ§(Troni and Whitcomb, 2013). Twostep л∞©л≤ХмЭА мЄ°м†ХмЭШ к∞Ам§СмєШ нПЙкЈ†мЭД кЄ∞л∞ШмЬЉл°Ь м§СмЛђ нОЄм∞® мґФм†ХмЭД л®Љм†А к≥ДмВ∞нХ®мЬЉл°ЬмН® нОЄм∞®л•Љ к≤∞м†ХнХЬлЛ§(Hashmall and Deutschmann, 1996). л≥Є мЧ∞кµђмЧРмДЬлКФ кЄ∞м°імЭШ л∞©л≤Х лМАмЛ† лђінЦ• мєЉлІМ нХДнД∞(Unscented Kalman filter, UKF)л•Љ мВђмЪ©нХШмЧђ нОЄм∞®л•Љ мґФм†ХнХШмШАлЛ§.
л≥Є лЕЉлђЄмЭШ 2мЮ•мЧРмДЬлКФ лђінЦ• мєЉлІМ нХДнД∞л•Љ мЭімЪ©нХЬ нОЄм∞® мґФм†Х л∞©л≤ХмЧР лМАнХШмЧђ мДЬмИ†нХЬлЛ§. 3мЮ•мЧРмДЬлКФ мЛ§м†Ь мЛ§нЧШ м†Хл≥іл•Љ мЭімЪ©нХЬ нОЄм∞® мґФм†Х к≤∞к≥Љл•Љ нЖµнХШмЧђ мД±лК•мЭД к≤Ам¶ЭнХШк≥†, 4мЮ•мЧРмДЬлКФ л≥Є лЕЉлђЄмЭШ к≤∞л°†мЭД лІЇлКФлЛ§.
2. л≥Є л°†
2.1 мґФм†ХмЭД мЬДнХЬ мГБнГЬм≤ЬмЭі л™®лНЄк≥Љ мЄ°м†Хл™®лНЄ мЬ†лПД
л≥Є м†ИмЭА мґФм†ХмЭД мЬДнХЬ лПДкµђлУ§ м§СмЧРмДЬ мГБнГЬм≤ЬмЭі л™®лНЄк≥Љ мЄ°м†Х л™®лНЄмЧР лМАнХЬ к≥µмЛЭмЭД мЬ†лПДнХЬлЛ§(Troni and Whitcomb, 2013). mмЭА мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЭіл©∞ m(t) = [mx(t) my(t) mz(t)]Tл°Ь нСЬкЄ∞лРЬлЛ§. л≥Є лЕЉлђЄмЧРмДЬлКФ нКєл≥ДнЮИ нШЉлПЩмЭШ м׊놧к∞А мЧЖлКФ к≤љмЪ∞ мЛЬк∞ДмЧР кіАнХЬ Parameter tл•Љ мГЭлЮµнХШмЧђ мВђмЪ©нХЬлЛ§. bлКФ мЮРкЄ∞мЮ• мЄ°м†Хк∞ТмЭШ нОЄм∞®л•Љ лВШнГАлВіл©∞ b = [bx by bz]Tл°Ь нСЬкЄ∞лРЬлЛ§. wлКФ мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ нЪМм†Д к∞БмЖНлПД л≤°нД∞мЭіл©∞ w = [wx wy wz]Tл°Ь нСЬкЄ∞лРЬлЛ§.


мЛЭ (1)мЧРмДЬ мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞ к∞Т m(t)мЭА м∞Єк∞Т  мЧР нОЄм∞® bк∞А лНФнХім†Є лВШнГАлВЬлЛ§. мЭілКФ мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ мВђмЪ©лРШлКФ мЛЭмЭіл©∞ мЛЭ (2)лКФ к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞Т m0мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мЧђкЄ∞мДЬ R(t)мЭА мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ к≥†м†ХмҐМнСЬк≥Дл°ЬмЭШ нЪМм†ДнЦЙл†ђмЭілЛ§. мЭіл•Љ нЖµнХі мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЧРмДЬ нОЄм∞®л•Љ лєЉм§А к≤∞к≥ЉмЧР нЪМм†ДнЦЙл†ђмЭД к≥±нХім§МмЬЉл°ЬмН® к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞ТмЭД кµђнХЬлЛ§.
мЧР нОЄм∞® bк∞А лНФнХім†Є лВШнГАлВЬлЛ§. мЭілКФ мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ мВђмЪ©лРШлКФ мЛЭмЭіл©∞ мЛЭ (2)лКФ к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞Т m0мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мЧђкЄ∞мДЬ R(t)мЭА мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ к≥†м†ХмҐМнСЬк≥Дл°ЬмЭШ нЪМм†ДнЦЙл†ђмЭілЛ§. мЭіл•Љ нЖµнХі мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЧРмДЬ нОЄм∞®л•Љ лєЉм§А к≤∞к≥ЉмЧР нЪМм†ДнЦЙл†ђмЭД к≥±нХім§МмЬЉл°ЬмН® к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞ТмЭД кµђнХЬлЛ§.
мЧР нОЄм∞® bк∞А лНФнХім†Є лВШнГАлВЬлЛ§. мЭілКФ мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ мВђмЪ©лРШлКФ мЛЭмЭіл©∞ мЛЭ (2)лКФ к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞Т m0мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мЧђкЄ∞мДЬ R(t)мЭА мДЉмДЬмҐМнСЬк≥ДмЧРмДЬ к≥†м†ХмҐМнСЬк≥Дл°ЬмЭШ нЪМм†ДнЦЙл†ђмЭілЛ§. мЭіл•Љ нЖµнХі мДЉмДЬмЧР мЭШнХі мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЧРмДЬ нОЄм∞®л•Љ лєЉм§А к≤∞к≥ЉмЧР нЪМм†ДнЦЙл†ђмЭД к≥±нХім§МмЬЉл°ЬмН® к≥†м†ХмҐМнСЬк≥ДмЧРмДЬ лВШнГАлВімЦімІД мЮРкЄ∞мЮ• л≤°нД∞мЭШ м∞Єк∞ТмЭД кµђнХЬлЛ§.мЛЭ (2)л•Љ лѓЄлґДнХШл©і мЛЭ (3)мЭі лРЬлЛ§.

нЪМм†ДнЦЙл†ђмЭД лѓЄлґДнХЬ  мЭА мЛЭ (4)м≤ШлЯЉ нСЬнШДлРЬлЛ§.
мЭА мЛЭ (4)м≤ШлЯЉ нСЬнШДлРЬлЛ§.
мЭА мЛЭ (4)м≤ШлЯЉ нСЬнШДлРЬлЛ§.
мЧђкЄ∞мДЬ S(w)мЭА л∞ШлМАмє≠ нЦЙл†ђ(Skew symmetric matrix)мЭіл©∞ мЄ°м†ХлРЬ нЪМм†Д к∞БмЖНлПД wмЪФмЖМл•Љ мВђмЪ©нХШмЧђ кµђмД±лРЬ нЦЙл†ђмЭілЛ§.

мЛЭ (4)л•Љ мВђмЪ©нХШл©і, мЛЭ (3)мЭі мЛЭ (6)мЬЉл°Ь л≥Ак≤љлРЬлЛ§.

нОЄм∞®лКФ мЛЬк∞ДмЧР лФ∞лЭЉ л≥АнХШмІА мХКлКФлЛ§к≥† к∞Ам†ХнХШк≥†, мЛЭ (6)мЭД мЭімЪ©нХШл©і мЛЭ (7)к≥Љ к∞ЩмЭА мГБнГЬм≤ЬмЭі л™®лНЄмЭі кµђнХімІДлЛ§.

л≥Є мЧ∞кµђмЧРмДЬлКФ мЮРкЄ∞мЮ•мЭД мЄ°м†ХнХШмЧђ мЮРкЄ∞мЮ• нОЄм∞®л•Љ мґФм†ХнХШлѓАл°Ь, мЄ°м†Хл≥АмИШ zлКФ z = mмЭі лРЬлЛ§. лФ∞лЭЉмДЬ мЄ°м†Хл™®лНЄмЭА мЛЭ (8)к≥Љ к∞ЩмЭі кµђнХімІДлЛ§.

мµЬмҐЕм†БмЬЉл°Ь мГБнГЬм≤ЬмЭі л™®лНЄмЭД мЛЭ (9)л°Ь нСЬнШДнХШл©∞ мЄ°м†Хл™®лНЄмЭА мЛЭ (10)мЬЉл°Ь нСЬнШДлРЬлЛ§.


2.2 лђінЦ• мєЉлІМ нХДнД∞ нОЄм∞® мґФм†Х
л≥Є м†ИмЭА лђінЦ• мєЉлІМ нХДнД∞л•Љ нЖµнХі нОЄм∞®л•Љ мґФм†ХнХШлКФ л∞©л≤ХмЧР лМАнХі мДЬмИ†нХЬлЛ§(Thrun et al, 2006). лђінЦ• мєЉлІМ нХДнД∞л•Љ нЖµнХі нОЄм∞® мґФм†ХнХШлКФ мХМк≥†л¶ђм¶ШмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШлКФ x = [mx my mz bx by bz]Tл°Ь мЮРкЄ∞мЮ• л≤°нД∞мЩА мЮРкЄ∞мЮ•мЧР лМАнХЬ нОЄм∞®л°Ь кµђмД±лРЬлЛ§. мґФм†Х мГБнГЬл≥АмИШмЧРмДЬ m = [mx my mz]TмЧР лМАнХЬ міИкЄ∞ к∞ТмЭА AHRSмЧРмДЬ мЄ°м†ХлРЬ мЮРкЄ∞мЮ•мЭД мВђмЪ©нХЬлЛ§. wлКФ л°ЬліЗмЭШ нЪМм†Д к∞БмЖНлПДл•Љ лВШнГАлВіл©∞ w = [wx wy wz]TмЭілЛ§. zлКФ мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЭЄ z = [mx my mz]TмЭілЛ§. Table 1мЧР лђінЦ• мєЉлІМ нХДнД∞л•Љ мЭімЪ©нХЬ нОЄм∞® мґФм†Х л∞©л≤ХмЭД мЭШмВђмљФлУЬл°Ь лВШнГАлВімЧИлЛ§. лђінЦ• мєЉлІМ нХДнД∞лКФ tмЛЬк∞БмЭШ мГБнГЬл≥АмИШмЩА кЈЄмЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД мґЬ놕нХШлКФ л∞©л≤ХмЬЉл°ЬмДЬ, t вИТ 1мЛЬк∞БмЭШ мГБнГЬл≥АмИШмЩА кЈЄмЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞, tмЛЬк∞БмЭШ нЪМм†Дк∞БмЖНлПД л≤°нД∞мЩА кЈЄ мЛЬк∞БмЭШ мЄ°м†Хк∞ТмЭД мЭімЪ©нХЬлЛ§.
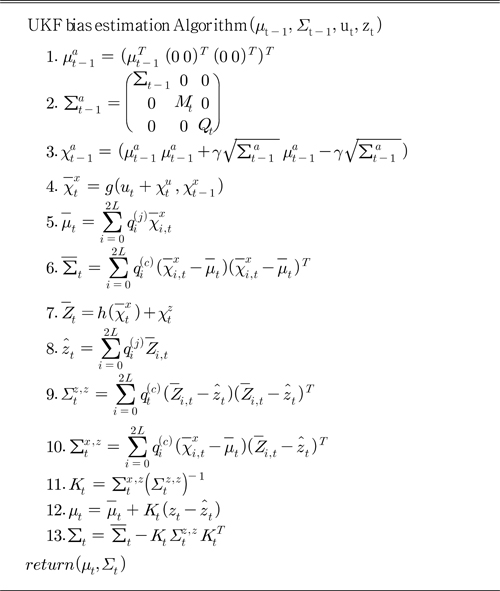
1л≤И м§ДмЭА мЛЬкЈЄлІИ нПђмЭЄнКЄ(Sigma point)мЭШ міИкЄ∞ мЪФмЖМлУ§мЭШ кµђмД±мЭД к≤∞м†ХнХШлКФ лЛ®к≥ДмЭілЛ§.  лКФ мЛЬк∞Б t вИТ 1мЭШ мґФм†Х мГБнГЬл≥АмИШл•Љ лЬїнХЬлЛ§. 2л≤И м§ДмЭШ
лКФ мЛЬк∞Б t вИТ 1мЭШ мґФм†Х мГБнГЬл≥АмИШл•Љ лЬїнХЬлЛ§. 2л≤И м§ДмЭШ  лКФ мґФм†ХлРЬ мГБнГЬл≥АмИШ ќЉt вИТ 1мЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ ќ£t вИТ 1к≥Љ мШИмЄ°к≥Љм†ХмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Mt, кЈЄл¶ђк≥† мЄ°м†Хк∞ТмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Qtл°Ь мЭіл£®мЦім†ЄмЮИлЛ§. нЪМм†Дк∞БмЖНлПД wлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі MtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(w ~ N(0, Mt)) мЭіл©∞, мЄ°м†Хк∞Т zлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі QtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(z ~ N(0, Qt))мЭілЛ§.
лКФ мґФм†ХлРЬ мГБнГЬл≥АмИШ ќЉt вИТ 1мЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ ќ£t вИТ 1к≥Љ мШИмЄ°к≥Љм†ХмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Mt, кЈЄл¶ђк≥† мЄ°м†Хк∞ТмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Qtл°Ь мЭіл£®мЦім†ЄмЮИлЛ§. нЪМм†Дк∞БмЖНлПД wлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі MtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(w ~ N(0, Mt)) мЭіл©∞, мЄ°м†Хк∞Т zлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі QtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(z ~ N(0, Qt))мЭілЛ§.
лКФ мЛЬк∞Б t вИТ 1мЭШ мґФм†Х мГБнГЬл≥АмИШл•Љ лЬїнХЬлЛ§. 2л≤И м§ДмЭШ лКФ мґФм†ХлРЬ мГБнГЬл≥АмИШ ќЉt вИТ 1мЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ ќ£t вИТ 1к≥Љ мШИмЄ°к≥Љм†ХмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Mt, кЈЄл¶ђк≥† мЄ°м†Хк∞ТмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞ Qtл°Ь мЭіл£®мЦім†ЄмЮИлЛ§. нЪМм†Дк∞БмЖНлПД wлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі MtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(w ~ N(0, Mt)) мЭіл©∞, мЄ°м†Хк∞Т zлКФ нПЙкЈ†к∞ТмЭі 0мЭік≥† к≥µлґДмВ∞мЭі QtмЭЄ к∞АмЪ∞мЛЬмХИ нЩХ땆л≥АмИШ(z ~ N(0, Qt))мЭілЛ§.3л≤И м§ДмЭА мЛЬкЈЄлІИ нПђмЭЄнКЄл•Љ мГЭмД±нХШлКФ лЛ®к≥ДмЭілЛ§.  мЭШ мЪФмЖМ к∞ЬмИШл•Љ nмЭілЭЉк≥† нХШл©і 2n вИТ 1к∞Ь мЛЬкЈЄлІИ нПђмЭЄнКЄк∞А мГЭмД±лРЬлЛ§. 1мЧімЭШ лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄ міИкЄ∞ м†Хл≥імЭілЛ§.
мЭШ мЪФмЖМ к∞ЬмИШл•Љ nмЭілЭЉк≥† нХШл©і 2n вИТ 1к∞Ь мЛЬкЈЄлІИ нПђмЭЄнКЄк∞А мГЭмД±лРЬлЛ§. 1мЧімЭШ лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄ міИкЄ∞ м†Хл≥імЭілЛ§.  лКФ 2л≤И м§ДмЧРмДЬ кµђнХЬ мЭД Cholesky лґДнХінХЬ к≤∞к≥ЉмЭілЛ§. ќ≥лКФ лЛ§мЭМ мЛЭмЭД нЖµнХі кµђнХімІДлЛ§(Rhudy and Gu, 2013).
лКФ 2л≤И м§ДмЧРмДЬ кµђнХЬ мЭД Cholesky лґДнХінХЬ к≤∞к≥ЉмЭілЛ§. ќ≥лКФ лЛ§мЭМ мЛЭмЭД нЖµнХі кµђнХімІДлЛ§(Rhudy and Gu, 2013).
мЭШ мЪФмЖМ к∞ЬмИШл•Љ nмЭілЭЉк≥† нХШл©і 2n вИТ 1к∞Ь мЛЬкЈЄлІИ нПђмЭЄнКЄк∞А мГЭмД±лРЬлЛ§. 1мЧімЭШ лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄ міИкЄ∞ м†Хл≥імЭілЛ§. лКФ 2л≤И м§ДмЧРмДЬ кµђнХЬ мЭД Cholesky лґДнХінХЬ к≤∞к≥ЉмЭілЛ§. ќ≥лКФ лЛ§мЭМ мЛЭмЭД нЖµнХі кµђнХімІДлЛ§(Rhudy and Gu, 2013).

мЛЭ (11)мЧРмДЬ ќ±лКФ 10вИТ4 вИЉ 1кєМмІА л≤ФмЬДмЭШ мИШмЭіл©∞ ќЇлКФ 0мЧР кЈЉм†СнХЬ мИШл•Љ мВђмЪ©нХЬлЛ§. ќ±, ќЇлКФ мЛЬкЈЄлІИ нПђмЭЄнКЄмЭШ л≤ФмЬДл•Љ м°∞м†ИнХШлКФлН∞ мВђмЪ©лРЬлЛ§. 3л≤И м§ДмЭД нЖµнХі ќЉt вИТ 1л•Љ кЄ∞м§АмЬЉл°Ь лґДнПђлРЬ мЛЬкЈЄлІИ нПђмЭЄнКЄк∞А мГЭмД±лРЬлЛ§.
4~6л≤И м§ДкєМмІАлКФ мГБнГЬмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭД кµђнХШк≥† кЈЄлУ§мЭШ нПЙкЈ†к≥Љ нПЙкЈ†мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. 4л≤И м§ДмЭА л™®мЕШл™®лНЄмЭД м†БмЪ©нХШмЧђ мГБнГЬмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мЧђкЄ∞мДЬ utлКФ нЪМм†Дк∞БмЖНлПДмЭШ л≤°нД∞л•Љ мЭШлѓЄнХЬлЛ§.  лКФ 3л≤И м§ДмЧРмДЬ мГЭмД±лРЬ нЪМм†Дк∞БмЖНлПДмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄл•Љ лЬїнХЬлЛ§. мЛЭ (9)мЭЄ мГБнГЬм≤ЬмЭі л™®лНЄмЭД 4л≤И м§ДмЧР м†БмЪ©нХЬлЛ§.
лКФ 3л≤И м§ДмЧРмДЬ мГЭмД±лРЬ нЪМм†Дк∞БмЖНлПДмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄл•Љ лЬїнХЬлЛ§. мЛЭ (9)мЭЄ мГБнГЬм≤ЬмЭі л™®лНЄмЭД 4л≤И м§ДмЧР м†БмЪ©нХЬлЛ§.
лКФ 3л≤И м§ДмЧРмДЬ мГЭмД±лРЬ нЪМм†Дк∞БмЖНлПДмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄл•Љ лЬїнХЬлЛ§. мЛЭ (9)мЭЄ мГБнГЬм≤ЬмЭі л™®лНЄмЭД 4л≤И м§ДмЧР м†БмЪ©нХЬлЛ§.
мЛЭ (13)мЧРмДЬ  лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШлІМмЬЉл°Ь кµђмД±лРЬлЛ§. ќФtлКФ tмЛЬк∞Бк≥Љ t вИТ 1мЛЬк∞БмЭШ м∞®мЭіл•Љ лЬїнХЬлЛ§. мЛЭ (14)мЧРмДЬ A(t)лКФ мЛЭ (5)мЧРмДЬ мВђмЪ©нХЬ л∞ШлМАмє≠ нЦЙл†ђ S(w)л°Ь кµђмД±лРЬ нЦЙл†ђмЭіл©∞ S(w)лКФ нЪМм†Д к∞БмЖНлПД л≤°нД∞ utл°Ь кµђмД±лРЬлЛ§.
лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШлІМмЬЉл°Ь кµђмД±лРЬлЛ§. ќФtлКФ tмЛЬк∞Бк≥Љ t вИТ 1мЛЬк∞БмЭШ м∞®мЭіл•Љ лЬїнХЬлЛ§. мЛЭ (14)мЧРмДЬ A(t)лКФ мЛЭ (5)мЧРмДЬ мВђмЪ©нХЬ л∞ШлМАмє≠ нЦЙл†ђ S(w)л°Ь кµђмД±лРЬ нЦЙл†ђмЭіл©∞ S(w)лКФ нЪМм†Д к∞БмЖНлПД л≤°нД∞ utл°Ь кµђмД±лРЬлЛ§.
лКФ мЛЬкЈЄлІИ нПђмЭЄнКЄмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШлІМмЬЉл°Ь кµђмД±лРЬлЛ§. ќФtлКФ tмЛЬк∞Бк≥Љ t вИТ 1мЛЬк∞БмЭШ м∞®мЭіл•Љ лЬїнХЬлЛ§. мЛЭ (14)мЧРмДЬ A(t)лКФ мЛЭ (5)мЧРмДЬ мВђмЪ©нХЬ л∞ШлМАмє≠ нЦЙл†ђ S(w)л°Ь кµђмД±лРЬ нЦЙл†ђмЭіл©∞ S(w)лКФ нЪМм†Д к∞БмЖНлПД л≤°нД∞ utл°Ь кµђмД±лРЬлЛ§.
5л≤И м§ДмЭА 4л≤И м§ДмЧРмДЬ мШИмЄ°лРЬ мГБнГЬмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭШ нПЙкЈ†мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мШИмЄ°лРЬ мГБнГЬмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄмЧР к∞Ам§СмєШ ( )мЭД нЖµнХі нПЙкЈ†мЭД кµђнХЬлЛ§.
)мЭД нЖµнХі нПЙкЈ†мЭД кµђнХЬлЛ§.
)мЭД нЖµнХі нПЙкЈ†мЭД кµђнХЬлЛ§.

6л≤И м§ДмЭА 5л≤И м§ДмЧРмДЬ кµђнХЬ  мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. мШ§м∞® к≥µлґДмВ∞мЭД кµђнХ† лХМ мВђмЪ©лРШлКФ к∞Ам§СмєШ (
мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. мШ§м∞® к≥µлґДмВ∞мЭД кµђнХ† лХМ мВђмЪ©лРШлКФ к∞Ам§СмєШ ( )лКФ лЛ§мЭМк≥Љ к∞ЩлЛ§.
)лКФ лЛ§мЭМк≥Љ к∞ЩлЛ§.
мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. мШ§м∞® к≥µлґДмВ∞мЭД кµђнХ† лХМ мВђмЪ©лРШлКФ к∞Ам§СмєШ ()лКФ лЛ§мЭМк≥Љ к∞ЩлЛ§.

мЛЭ (17)мЧРмДЬ ќ≤лКФ 2мЧР кЈЉм†СнХЬ к∞ТмЭД мВђмЪ©нХЬлЛ§. мЛЭ (18)мЧРмДЬ к≥Љ лКФ i = 1, 2, 3, ¬Ј¬Ј¬Ј, 2nмЧР лМАнХШмЧђ лПЩмЭЉнХШлЛ§. л≥Є лЕЉлђЄмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШ мЭШ мЪФмЖМлКФ 6к∞ЬмЭіл©∞  лКФ 6√Ч6 нБђкЄ∞мЭШ нЦЙл†ђмЭі лРЬлЛ§.
лКФ 6√Ч6 нБђкЄ∞мЭШ нЦЙл†ђмЭі лРЬлЛ§.
к≥Љ лКФ i = 1, 2, 3, ¬Ј¬Ј¬Ј, 2nмЧР лМАнХШмЧђ лПЩмЭЉнХШлЛ§. л≥Є лЕЉлђЄмЧРмДЬ мґФм†Х мГБнГЬл≥АмИШ мЭШ мЪФмЖМлКФ 6к∞ЬмЭіл©∞ лКФ 6√Ч6 нБђкЄ∞мЭШ нЦЙл†ђмЭі лРЬлЛ§.7~9л≤И м§ДмЭА мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭД кµђнХШк≥† кЈЄлУ§мЭШ нПЙкЈ†к≥Љ нПЙкЈ†мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. 7л≤И м§ДмЭА мЄ°м†Х л™®лНЄмЭД мВђмЪ©нХШмЧђ мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄл•Љ кµђнХШлКФ лЛ®к≥ДмЭілЛ§.

мЛЭ (19)мЭА мЄ°м†Хл™®лНЄмЭЄ мЛЭ (10)мЭД м†БмЪ©нХЬ к≤∞к≥ЉмЭілЛ§. мЧђкЄ∞мДЬ H = [I 0]мЭілѓАл°Ь мШИмЄ°лРЬ мГБнГЬмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄ  мЧРмДЬ мЮРкЄ∞мЮ• л≤°нД∞лІМмЭД мВђмЪ©нХШк≤М лРШмЦі мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭі мГЭмД±лРЬлЛ§. 8л≤И м§ДмЭА мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭШ нПЙкЈ†мЭД кµђнХЬлЛ§. 9л≤И м§ДмЭА 8л≤И м§ДмЭШ мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄмЭШ нПЙкЈ†мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. 8,9м§Д л™®лСР 5,6м§Дк≥Љ лПЩмЭЉнХЬ л∞©л≤ХмЬЉл°Ь кµђнХімІАл©∞ мЄ°м†Хк∞ТмЬЉл°Ь мВђмЪ©лРШлКФ мЮРкЄ∞мЮ• л≤°нД∞лКФ 3к∞ЬмЭілѓАл°Ь
мЧРмДЬ мЮРкЄ∞мЮ• л≤°нД∞лІМмЭД мВђмЪ©нХШк≤М лРШмЦі мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭі мГЭмД±лРЬлЛ§. 8л≤И м§ДмЭА мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭШ нПЙкЈ†мЭД кµђнХЬлЛ§. 9л≤И м§ДмЭА 8л≤И м§ДмЭШ мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄмЭШ нПЙкЈ†мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. 8,9м§Д л™®лСР 5,6м§Дк≥Љ лПЩмЭЉнХЬ л∞©л≤ХмЬЉл°Ь кµђнХімІАл©∞ мЄ°м†Хк∞ТмЬЉл°Ь мВђмЪ©лРШлКФ мЮРкЄ∞мЮ• л≤°нД∞лКФ 3к∞ЬмЭілѓАл°Ь  лКФ 3√Ч3 нЦЙл†ђмЭілЛ§.
лКФ 3√Ч3 нЦЙл†ђмЭілЛ§.
мЧРмДЬ мЮРкЄ∞мЮ• л≤°нД∞лІМмЭД мВђмЪ©нХШк≤М лРШмЦі мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭі мГЭмД±лРЬлЛ§. 8л≤И м§ДмЭА мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄлУ§мЭШ нПЙкЈ†мЭД кµђнХЬлЛ§. 9л≤И м§ДмЭА 8л≤И м§ДмЭШ мЄ°м†Хк∞ТмЧР лМАнХЬ мЛЬкЈЄлІИ нПђмЭЄнКЄмЭШ нПЙкЈ†мЧР лМАнХЬ мШ§м∞®к≥µлґДмВ∞мЭД кµђнХЬлЛ§. 8,9м§Д л™®лСР 5,6м§Дк≥Љ лПЩмЭЉнХЬ л∞©л≤ХмЬЉл°Ь кµђнХімІАл©∞ мЄ°м†Хк∞ТмЬЉл°Ь мВђмЪ©лРШлКФ мЮРкЄ∞мЮ• л≤°нД∞лКФ 3к∞ЬмЭілѓАл°Ь лКФ 3√Ч3 нЦЙл†ђмЭілЛ§.10л≤И м§ДмЭА мґФм†ХнХЬ мГБнГЬл≥АмИШмЩА мЄ°м†Хк∞ТмЭШ мЛЬкЈЄлІИ нПђмЭЄнКЄмЧР лМАнХЬ мШ§м∞® к≥µлґДмВ∞мЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. лКФ 6√Ч6 нЦЙл†ђмЭіл©∞ лКФ 3√Ч3 нЦЙл†ђмЭілѓАл°Ь мЧ∞мВ∞мЭШ к≤∞к≥ЉлКФ  лКФ 6√Ч3 нЦЙл†ђмЭі лРЬлЛ§. 11л≤И м§ДмЭА мєЉлІМ мЭілУЭмЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§.
лКФ 6√Ч3 нЦЙл†ђмЭі лРЬлЛ§. 11л≤И м§ДмЭА мєЉлІМ мЭілУЭмЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§.
лКФ 6√Ч6 нЦЙл†ђмЭіл©∞ лКФ 3√Ч3 нЦЙл†ђмЭілѓАл°Ь мЧ∞мВ∞мЭШ к≤∞к≥ЉлКФ лКФ 6√Ч3 нЦЙл†ђмЭі лРЬлЛ§. 11л≤И м§ДмЭА мєЉлІМ мЭілУЭмЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§.12л≤И м§ДмЭА мЛЬк∞Б tмХ†мДЬмЭШ мГБнГЬл≥АмИШ ќЉtмЭД кµђнХШлКФ к≥Љм†ХмЭілЛ§. мШИмЄ°нХЬ мГБнГЬл≥АмИШмЧР мєЉлІМ мЭілУЭмЭД мВђмЪ©нХШмЧђ л≥ім†ХнХ®мЬЉл°ЬмН® мµЬмҐЕм†БмЬЉл°Ь мЛЬк∞Б tмЧРмДЬмЭШ мГБнГЬк∞А мґФм†ХлРЬлЛ§. мЭі к≥Љм†ХмЧРмДЬ кµђнХЬ к≤∞к≥Љ ќЉtлКФ лЛ§мЭМ мЛЬк∞БмЭШ мґФм†Х мХМк≥†л¶ђм¶ШмЧРмДЬ ќЉt вИТ 1л°Ь мВђмЪ©лРЬлЛ§. 13л≤И м§ДмЭА мЛЬк∞Б tмЧРмДЬмЭШ ќ£tл•Љ кµђнХШлКФ к≥Љм†ХмЭілЛ§. мШ§м∞® к≥µлґДмВ∞ ќ£tлКФ лЛ§мЭМ мЛЬк∞БмЭШ мґФм†Х мХМк≥†л¶ђм¶ШмЧРмДЬ ќ£t вИТ 1л°Ь мВђмЪ©лРЬлЛ§.
мґФк∞Ам†БмЬЉл°Ь мД±лК• лєДкµРл•Љ мЬДнХі мґФм†ХнХЬ нОЄм∞®л•Љ л≥ім†ХнХЬ мЮРкЄ∞мЮ• л≤°нД∞мЩА нОЄм∞®л•Љ л≥ім†ХнХШмІА мХКлКФ мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХШмЧђ мЮРмДЄл•Љ мґФм†ХнХЬлЛ§. AHRSмДЉмДЬ мЄ°м†Хк∞ТмЭД мВђмЪ©нХШл©∞, мґФм†Х л∞©л≤ХмЬЉл°ЬлКФ лђінЦ• мєЉлІМ нХДнД∞л•Љ мВђмЪ©нХЬлЛ§. мґФм†Х мГБнГЬл≥АмИШлКФ [ѕХ, ќЄ, ѕИ]T мЭіл©∞ мЄ°м†Х м†Хл≥ілКФ к∞АмЖНлПД a = [ax, ay,az]TмЩА нОЄм∞®к∞А л≥ім†ХлРЬ мЮРкЄ∞мЮ• 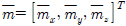 л•Љ мВђмЪ©нХЬлЛ§. лІИмІАлІЙмЬЉл°Ь мґФм†ХнХЬ мЮРмДЄ м†Хл≥імЩА DVL(Doppler velocity log)мДЉмДЬ м†Хл≥іл•Љ мВђмЪ©нХШмЧђ мґФмЄ°нХ≠л≤ХмЭД мВђмЪ©нХШмЧђ мЬДмєШл•Љ мґФм†ХнХЬлЛ§.
л•Љ мВђмЪ©нХЬлЛ§. лІИмІАлІЙмЬЉл°Ь мґФм†ХнХЬ мЮРмДЄ м†Хл≥імЩА DVL(Doppler velocity log)мДЉмДЬ м†Хл≥іл•Љ мВђмЪ©нХШмЧђ мґФмЄ°нХ≠л≤ХмЭД мВђмЪ©нХШмЧђ мЬДмєШл•Љ мґФм†ХнХЬлЛ§.
л•Љ мВђмЪ©нХЬлЛ§. лІИмІАлІЙмЬЉл°Ь мґФм†ХнХЬ мЮРмДЄ м†Хл≥імЩА DVL(Doppler velocity log)мДЉмДЬ м†Хл≥іл•Љ мВђмЪ©нХШмЧђ мґФмЄ°нХ≠л≤ХмЭД мВђмЪ©нХШмЧђ мЬДмєШл•Љ мґФм†ХнХЬлЛ§.3. мЛ§ нЧШ
3.1 мЛ§нЧШ нЩШк≤љ л∞П м°∞к±і
л≥Є мЛ§нЧШмЭА мД†л∞ХнХімЦСнФМлЮЬнКЄмЧ∞кµђмЖМмЧР мД§мєШлРЬ мИШм°∞мЧРмДЬ мЛ§нЦЙлРШмЧИлЛ§. Fig. 1мЧР л≥імЭЄл∞ФмЩА к∞ЩмЭі вАШгДєвАЩл™®мЦСмЭШ мЪінХ≠к≤љл°Ьл°Ь мИШм§Сл°ЬліЗмЭД мЭілПЩмЛЬнВ§л©∞ AHRSмЩА DVLмЭД мВђмЪ©нХШмЧђ мЄ°м†Хк∞ТмЭД кµђнХШмШАлЛ§. мЪінХ≠к≤љл°ЬлКФ 1.4m√Ч2.2mмЭШ нБђкЄ∞л•Љ к∞АмІДлЛ§. лЛ§мЦСнХЬ кґ§м†БмЭШ мЪінХ≠мЬЉл°Ь мЛ§нЧШнЦИмІАлІМ кЈЄм§СмЧРмДЬ вАШгДєвАЩл™®мЦСмЭА мЮСмЭА к≥µк∞ДмЧРмДЬ мЭілПЩк±∞л¶ђк∞А кЄЄл©∞, мІБмД†мЪілПЩмЭД нХШл©імДЬ лЛ§мЦСнХЬ л∞©нЦ•мЬЉл°Ь нЪМм†ДмЭі к∞АлК•нХШкЄ∞ лХМлђЄмЧР лЛ§л•Є мЭілПЩк≤љл°Ьл≥ілЛ§ нБ∞ л≥АнЩФлЯЙмЭД к∞АмІДлЛ§.
3.2 мЛ§нЧШ к≤∞к≥Љ
Fig. 2мЧРмДЬ (a)вИЉ(c)лКФ мЛЬк∞БмЧР лФ∞л•Є xмґХ, yмґХ, zмґХ л∞©нЦ•мЭШ мЮРкЄ∞ мЮ• л≤°нД∞л•Љ нСЬнШДнХШк≥† мЮИмЬЉл©∞ нММлЮСмГЙ мД†мЭА к∞Б мґХл∞©нЦ•мЭШ мЮРкЄ∞мЮ• л≤°нД∞л•Љ лЬїнХШл©∞ лє®к∞ХмГЙ м†РмД†мЭА мґФм†ХнХЬ нОЄм∞®мД±лґДмЭД лЬїнХЬлЛ§. лІИмІАлІЙмЬЉл°Ь лЕємГЙ мД†мЭА нОЄм∞®мЭШ нПЙкЈ†мЭД лЬїнХЬлЛ§. Fig. 2мЧРмДЬ (d)лКФ mxмЩА myл•Љ лПЩмЛЬмЧР нСЬнШДнХШмШАлЛ§. мЮРкЄ∞мЮ•мЭі мЩЬк≥° лРШмІА мХКмХШмЭД к≤љмЪ∞мЧРлКФ (0, 0)мІАм†РмЭД кЄ∞м§АмЬЉл°Ь нХШлКФ мЫРнШХмЭі ꣪놧 м†ЄмХЉнХЬлЛ§. нХШмІАлІМ, л≥Є мЛ§нЧШмЧРмДЬлКФ Hard iron нЪ®к≥ЉмЩА Soft iron нЪ®к≥ЉмЧР мЭШнХі мЮРкЄ∞мЮ•мЭі мЩЬк≥°лРШмЦі м§СмЛђм†РмЭі (0, 0)мЧРмДЬ л≤ЧмЦілВШк≥† мЫРмЭі мХДлЛМ нГАмЫР л™®мЦСмЭД л≥імЧђм§АлЛ§. мЭілЯђнХЬ мЄ°м†Х к≤∞к≥Љл°ЬлґАнД∞ л≥Є мЛ§нЧШмЧРмДЬ мВђмЪ©лРШлКФ мЮРкЄ∞мЮ• мЄ°м†Хк∞ТмЧР нОЄм∞® мЪФмЖМк∞А м°імЮђнХ®мЭД мХМ мИШ мЮИлЛ§.
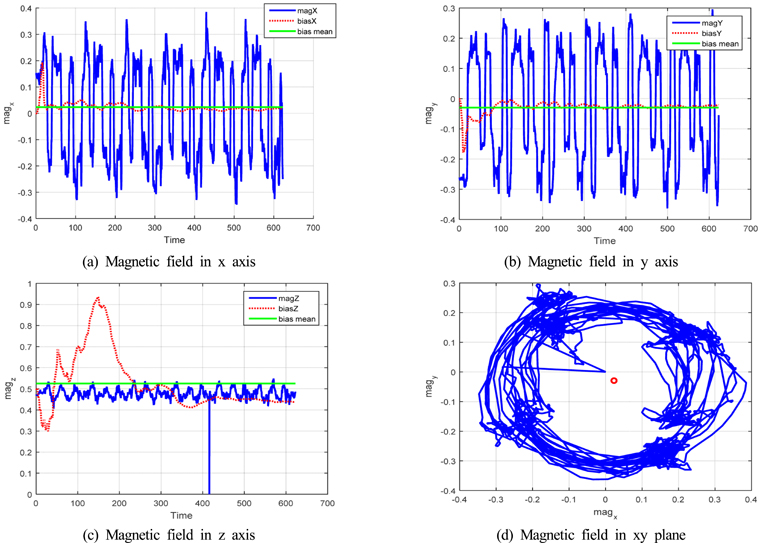
Fig. 3мЭА UKF нОЄм∞® мґФм†Х мХМк≥†л¶ђм¶ШмЭШ к≤∞к≥Љ к∞ТмЭД кЈЄлЮШнФДл°Ь лВШнГАлВік≥† мЮИмЬЉл©∞ Table 2мЭА xмґХ, yмґХ, zмґХмЧРмДЬ мґФм†ХлРЬ нОЄм∞®мЭШ нПЙкЈ†мЭД лВШнГАлВЄлЛ§.

л≥Є мЛ§нЧШмЭА Roll, Pitch к∞БмЭі (0, 0)к∞БлПДмЧРмДЬ нБђк≤М л≤ЧмЦілВШмІА мХКкЄ∞ лХМлђЄмЧР Table 4мЭШ к≤∞к≥Љ к∞Т м§С bmx мЩА bmyлКФ мЭіл°†мГБ лђЄм†Ьк∞А мЧЖлЛ§. нХШмІАлІМ, мЮРкЄ∞мЮ• zм†Хл≥ілКФ мЭЉм†ХнХЬ к∞ТмЬЉл°Ь мґЬ놕мЭі лРШкЄ∞ лХМлђЄмЧР мЛ§нЧШмЧРмДЬ мЄ°м†ХлРЬ л≤°нД∞л°ЬлКФ нОЄм∞®л•Љ мґФм†ХнХ† мИШ мЧЖлЛ§. кЈЄлЯђлѓАл°Ь нОЄм∞®мЭШ zмЪФмЖМл•Љ кµђнХШкЄ∞ мЬДнХімДЬлКФ мЛ§нЧШмЧРмДЬ мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЩА World magnet model(WMM)мЧРмДЬ кµђнХЬ мЮРкЄ∞мЮ• л≤°нД∞л•Љ лєДкµРнХЬлЛ§(NOAA, 2016).
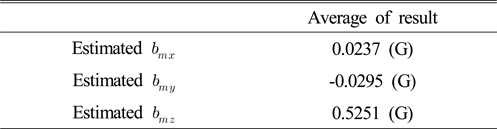
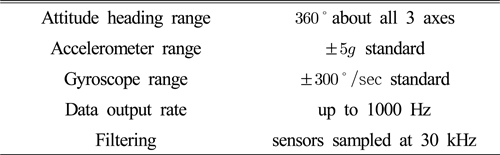
Table 5мЧРмДЬ мЮРкЄ∞мЮ• zмґХмЭШ нОЄм∞®л•Љ кµђнХШкЄ∞ мЬДнХі мЛ§нЧШмЧРмДЬ мЄ°м†ХнХЬ мЮРкЄ∞мЮ• zмґХмЭШ нОЄм∞®мЩА WMMмЧРмДЬ кµђнХЬ мЮРкЄ∞мЮ• zмґХмЭШ нОЄм∞®л•Љ мЧ∞мВ∞нХЬлЛ§. кЈЄ к≤∞к≥Љ к∞ТмЭА Table 5мЧР лІИмІАлІЙ Bias_zл°Ь кЄ∞м†Ь лРШмЦімЮИлЛ§. лІИмІАлІЙмЬЉл°Ь мЛ§нЧШмЧРмДЬ мЄ°м†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞мЧРмДЬ мґФм†ХнХЬ нОЄм∞®л•Љ м†Ьк±∞нХЬ нЫД мЮРмДЄл•Љ мґФм†ХнХЬлЛ§. мЮРмДЄ мґФм†Х л∞©л≤Х лШРнХЬ UKFл∞©л≤ХмЭД мВђмЪ©нХЬлЛ§.
Table 5
Comparison of world magnetic model (WMM) and the measured magnetic field, and bias in z directional magnetic field
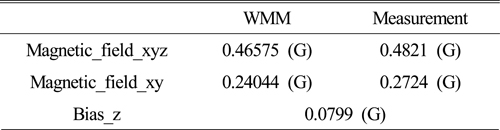
Fig. 4мЧРмДЬ (a)мЩА (b)лКФ Roll, PitchмЪФмЖМл•Љ мґФм†ХнХЬ к≤∞к≥ЉмЭілЛ§. л≥Є мЛ§нЧШмЭА мЛ§м†Ь л∞ФлЛ§к∞А мХДлЛМ лІМлУ§мЦімІД мИШм°∞мЧРмДЬ мЛ§мЛЬлРШл©∞ мИШм§С л°ЬліЗмЭі мІБмД†мЬЉл°Ь мЪінЦЙнЦИкЄ∞ лХМлђЄмЧР Rollк≥Љ PitchмЭШ л≥АнЩФлЯЙмЭі м†БлЛ§. Fig. 4мЧРмДЬ (c)лКФ YawмЪФмЖМл•Љ мґФм†ХнХЬ к≤∞к≥ЉмЭілЛ§. мИШм§Сл°ЬліЗмЭі лПЩмЭЉнХЬ кєКмЭімЧРмДЬ мЭілПЩнХШмШАмЬЉлѓАл°Ь л≥АнЩФлЯЙмЭі к∞АмЮ• нБ∞ мЪФмЖМлКФ YawмЭіл©∞ вИТ180вИЉ180мВђмЭімЭШ л≥АнЩФлЯЙмЭД к∞АмІАк≥† мЮИлЛ§. кЈЄлЮШнФД м§СмЧРмДЬ лє®к∞ДмГЙ мЫРмЭА мИШм§С л°ЬліЗмЭі вАШгДєвАЩл™®мЦСмЭШ к≤љл°Ьл°Ь мЫАмІБмЭікЄ∞ мЛЬмЮСнХЬ мІАм†РмЭД лЬїнХЬлЛ§. Fig. 4мЧРмДЬ (d)лКФ мИШм§С л°ЬліЗмЭШ мЬДмєШл•Љ мґФм†ХнХЬ к≤∞к≥ЉмЭілЛ§. мґФм†ХлРЬ мЮРмДЄмЩА мЛ§нЧШмЧРмДЬ DVLмЧР мЭШнХі мЄ°м†ХлРЬ мЖНлПДл•Љ мВђмЪ©нХШмЧђ мґФмЄ°нХ≠л≤ХмЧР мЭШнХі л°ЬліЗмЭШ мЬДмєШл•Љ мґФм†ХнХШмШАлЛ§. міЭ 7л≤ИмЭШ вАШгДєвАЩ л™®мЦСмЭШ к≤љл°Ьл•Љ мЩХл≥µ мЪінХ≠нХЬ мЛ§нЧШмЭіл©∞ мЪінХ≠мЭШ мµЬмҐЕм†РмЭА мЪінХ≠мЭШ мЛЬмЮСм†Рк≥Љ лПЩмЭЉнХШлЛ§.
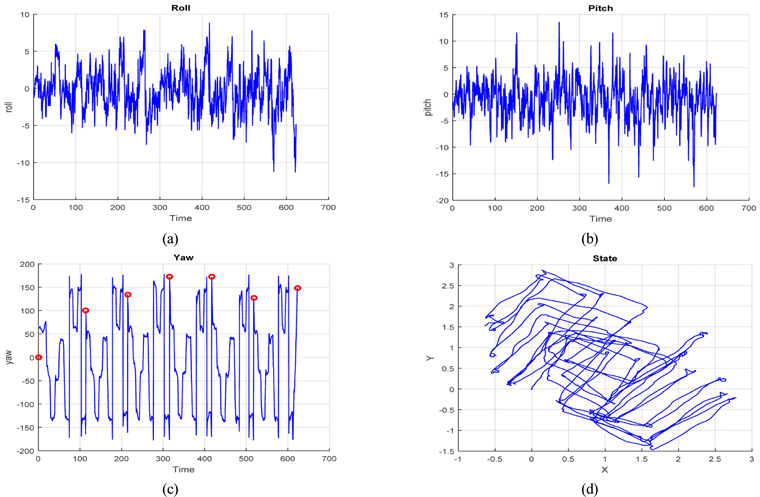
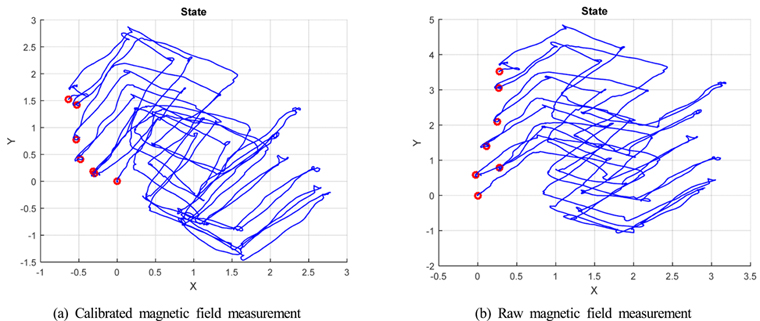
Fig. 5мЧРмДЬ (a)лКФ нОЄм∞®к∞А л≥ім†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХШмЧђ мЬДмєШл•Љ мґФм†ХнХЬ к≤∞к≥ЉмЭіл©∞ Fig. 5мЧРмДЬ (b)лКФ нОЄм∞®к∞А л≥ім†ХлРШмІА мХКлКФ мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХШмЧђ мЬДмєШл•Љ мґФм†ХнХЬ к≤∞к≥ЉмЭілЛ§. мД±лК•лєДкµР к≤∞к≥ЉлКФ Table 6к≥Љ к∞ЩлЛ§. Table 6мЭА вАШгДєвАЩл™®мЦСмЭШ к≤љл°Ьл°Ь мЪінХ≠нХШкЄ∞ мЛЬмЮСнХЬ мІАм†Рк≥Љ лІИмІАлІЙ мЪінХ≠мЭі лБЭлВШлКФ мІАм†РмВђмЭімЭШ к±∞л¶ђл•Љ кµђнХЬлЛ§. к±∞л¶ђл•Љ лєДкµРнХ®мЬЉл°ЬмН® нОЄм∞®к∞А л≥ім†ХлРЬ мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХЬ мЬДмєШ мґФм†Хк≤∞к≥Љк∞А нОЄм∞®к∞А л≥ім†ХлРШмІА мХКмЭА мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХЬ мЬДмєШ мґФм†Хк≤∞к≥Љл≥ілЛ§ мҐЛмЭА мД±лК•мЭД л≥імЭЄлЛ§.

4. к≤∞ л°†
AHRSмЭШ мЮРкЄ∞мЮ• мЄ°м†Хк∞ТмЭА Hard iron нЪ®к≥ЉмЩА Soft iron нЪ®к≥Љл°Ь мЭЄнХЬ мЩЬк≥°мЧР мЈ®мХљнХШлЛ§лКФ лђЄм†Ьл•Љ к∞АмІАк≥† мЮИлЛ§. л≥Є лЕЉлђЄмЧРмДЬлКФ мЭілЯђнХЬ лђЄм†Ьл•Љ нХімЖМнХШкЄ∞ мЬДнХі Hard iron нЪ®к≥Љл°Ь мЭЄнХЬ нОЄм∞®л•Љ мґФм†ХнХШлКФ л∞©л≤ХмЭД м†ЬмХИнХШк≥†, мґФм†ХлРЬ нОЄм∞® л≥ім†ХмЧР лФ∞лЭЉ нХ≠л≤ХмД±лК•мЭі нЦ•мГБлР®мЭД л≥імШАлЛ§. лђінЦ• мєЉлІМ нХДнД∞л•Љ мВђмЪ©нХШмЧђ мЮРкЄ∞мЮ• нОЄм∞®л•Љ мґФм†ХнХШмШАлЛ§. нОЄм∞®мґФм†ХмД±лК•мЭД нЩХмЭЄнХШкЄ∞ мЬДнХімДЬ нОЄм∞®к∞А л≥ім†ХлРЬ мЮРкЄ∞мЮ•мЭШ л≤°нД∞л•Љ мВђмЪ©нХЬ мЮРмДЄмґФм†Хк≥Љ нОЄм∞®к∞А л≥ім†ХлРШмІА мХКлКФ мЮРкЄ∞мЮ• л≤°нД∞л•Љ мВђмЪ©нХЬ мЮРмДЄмґФм†ХмЭД лєДкµРнХШмШАлЛ§. нОЄм∞®л•Љ л≥ім†ХнХЬ мЮРкЄ∞мЮ•мЭД мВђмЪ©нХ† к≤љмЪ∞, нОЄм∞®л•Љ л≥ім†ХнХШмІА мХКлКФ мЮРкЄ∞мЮ•мЭД мВђмЪ©нХ† к≤љмЪ∞л≥ілЛ§ мЮРмДЄмґФм†Х мД±лК•мЭі нЦ•мГБлР®мЭД мЛ§нЧШмЭД нЖµнХШмЧђ нЩХмЭЄнЦИлЛ§.
мЮРкЄ∞мЮ• мЄ°м†Х мШ§м∞®лКФ Hard iron нЪ®к≥ЉлњР мХДлЛИлЭЉ Soft iron нЪ®к≥Љ, нЩШмВ∞к≥ДмИШмШ§м∞®, мЄ°м†Х мґХ м†Хл†ђмШ§м∞® лУ±мЧР мЭШнХімДЬ л∞ЬмГЭнХЬлЛ§. лФ∞лЭЉмДЬ нЦ•нЫД мЧ∞кµђмЧРмДЬлКФ Hard iron нЪ®к≥Љ мЭімЩЄмЭШ мЪФмЖМлУ§мЭД мґФм†ХнХШлКФ л∞©л≤ХмЭД мЧ∞кµђнХ† мШИм†ХмЭілЛ§.




