수중음향 수평 배열 플랫폼의 거동 해석과 시험
Analysis and Tests of the Behavior of an Underwater Acoustic Horizontal Array Platform
Article information

Trans Abstract
Most underwater acoustic arrays for low frequency operation are deployed vertically, but a mid-range frequency horizontal array system is being developed by the Korea Research Institute of Ships and Ocean Engineering (KRISO). The horizontal array platform is deployed underwater and kept in place by weather vaning mooring. This is essential because it is nearly impossible to keep a submerged body at a given position in the water without any external force. Hence, the horizontal array platform can maintain the desired position in the presence of a weak tidal current. The objective of this study is to design an underwater platform that can maintain its horizontal position in a weak current. First, the authors investigated various virtual models, selected one of the models, and performed a small model test of the selected model at a basin. We calculated the external forces associated with the 2D motion, and then we conducted a large basin test followed by a circulation water channel test for the manufactured array platform. The results of the simplified 2D motion calculation essentially matched the results of the underwater test.
1. 서 론
수중에서 어떤 물체가 중성부력인 상태로 여타의 추진력이 없이 위치를 유지하는 것은 거의 불가능하다(Berteaux, 1976). 본 연구에서는 중주파수 대역(10kHz 미만)의 수평배열을 일정한 수심에서 고정된 상태로 운용하는 중주파수 배열 시스템의 플랫폼을 설계하였다. 수평배열을 예인하지 않고 고정된 상태로 운용하는 것은 매우 어려운 일이다. 이러한 시스템은 아직 알려진 바가 없어 새로운 개념으로 설계가 되어야 했다.
유사한 시스템으로 일본의 IHI(Ishikawajima-Harima Heavy Industries Co., Ltd)에서 개발한 Autonomous fixed point mooring oceanographic observation buoy system(OOS)이 있으며 이 시스템은 배열이 아닌 단일 하이드로폰을 동력 없는 유선형 선체 끝에 예인하는 형태로 운용하는 시스템이다. 이 시스템은 어뢰 형태의 추진기가 없는 선체를 수중 부이에 연결하고 매우 긴 연결케이블을 이용하여 주기적으로 수면에 올라와서 계측 자료를 전송하는 형태로 운용하였다(Ichikawa and Hirate, 2017)
본 연구에서는 음향신호의 간섭을 줄이기 위해 배열과 선체가 일정한 거리를 두고 상하로 나눠진 형태로 된 배열 플랫폼을 설계하였다. 개발한 시스템의 명칭은 ‘배열센서시스템’이라고 하였다. 해중에서 발생하는 조류의 영향을 적게 받으면서 수평을 유지하고 위치 변화를 최소화하면서 운용할 수 있도록 여러 가지 운용 방법을 검토하고 최종 선정된 운용 형태에 대해 모형시험, 운동 분석 및 회류수조 시험을 통해 운용에서 중요한 수평 안정성을 검증하였다.
본 논문은 다음과 같이 구성되었다. 먼저 2절에서는 여러 가지 형태의 계류 방법을 검토하였으며 배열센서시스템의 전반적인 구성을 설명하였다. 3절에서는 배열센서시스템의 주된 수중운동이 될 것으로 예상되는 수직면 운동에 대해 조류가 있는 경우 배열시스템의 경사 각도를 추정하였다. 4절에서는 개발한 배열센서시스템을 3차원 수조와 회류수조에서 수행한 시험과 결과에 대해 설명하였다.
2. 배열센서시스템의 운용방법 검토
2.1 수중부이를 운용하는 방법
두 개의 선체를 가진 배열센서시스템을 수중에서 수평으로 고정된 위치에서 운용하기 위해 수중부이를 이용하는 방법을 사용하기로 하였다. 이러한 수중부이는 해저면의 침추와 부력에 의해 장력이 있는 소위 ‘타우트 와이어(Tout wire)’로 연결되며 여기에 배열센서시스템을 어떻게 연결하여 운용할 것인가를 검토하였다. 처음 검토된 방법은 Fig. 1처럼 부이와 침추 중간에 위아래로 두 점을 연결하여 운용하는 방법인데 그림에서 보이는 것처럼 실해역에서 발생하는 조류에 의해 수중 부이가 기울어지면 배열센서가 수평을 유지하지 못하는 문제가 발생한다.
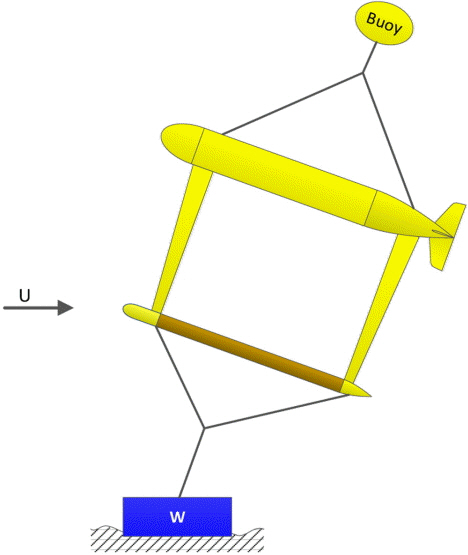
4-point mooring of the array sensor system
다음으로 수중부이가 조류에 의해 기울어지더라도 배열센서시스템은 수평을 유지하도록 웨더베이닝(Weather vaning) 계류 방법을 검토하였다. 이 방법은 여타의 추진 장치가 없는 배열센서시스템이 조류에 의해 방향이 변하더라도 수평을 유지하도록 상부 주선체에 날개를 달아 수평이 유지 되도록 하였다. 첫 번째 방법과의 차이는 Fig. 2에 보이는 바와 같다.
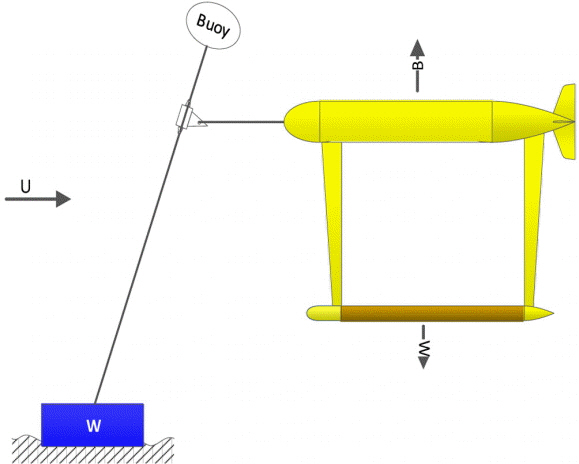
Weather vaning mooring of the array sensor system
2.2 배열센서시스템의 구성과 운용 방법
개발한 배열센서시스템(Byun et al., 2018)은 중주파수 배열이 음향적 간섭을 받지 않도록 앰프와 신호처리 시스템이 탑재된 주선체(Platform)와 일정한 간격을 가지도록 설계되었다. 상부의 주선체에는 이밖에도 능동 시스템으로 운용할 수 있도록 송출센서(Acoustic projector)가 탑재 된다. 그 구성도는 Fig. 3과 같다.
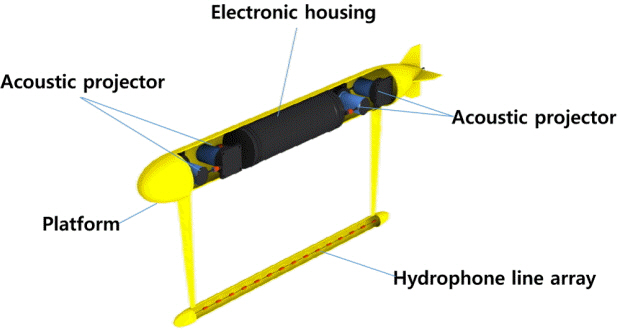
Array sensor system configuration
배열센서시스템은 장거리 수중 표적 및 음원을 탐지하고 위치와 특징 정보를 추출하기 위한 배열 신호처리 핵심기술을 개발하기 위해 제작되었다. 배열센서시스템의 최대 운용 수심은 100m이다.
배열센서시스템은 별도의 수상부이의 RF(Radio frequency) 안테나를 통한 원격 제어 및 모니터링이 가능하며 수심(압력), 수온, 자세 및 방향 센서를 내장하여 원격에 있는 선상제어 시스템에서 감시가 가능하다. 실제적인 운용방법은 Fig. 4와 같다.
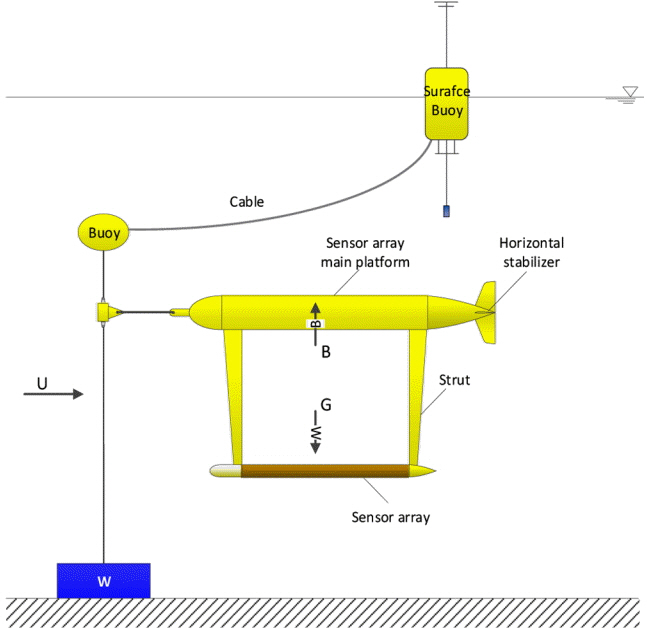
Deployment of array sensor system
3. 배열센서시스템의 조류 중 운동 해석
배열센서시스템은 중거리(10km 이내)의 목표물 탐지를 그 목표 성능으로 하고 있어 실해역에서 운용될 예정이다. 따라서 바다에는 항상 존재하는 조류 상에서 운용되어야 하므로 앞 절에서 설명한 바와 같이 조류 상에서 수평자세를 유지하도록 본체 선미에 수평과 수직 날개를 설치하였다.
설치된 날개에서 발생하게 되는 양력에 의한 모멘트와 부력과 중력에 의한 모멘트, 주선체와 배열센서의 동체양력에 의한 모멘트 및 조류로 인한 항력에 의한 모멘트가 계류점(Mooring point)을 중심으로 어떻게 작용하게 되는지 알아보기 위해 동적인 운동이지만 정상상태로 가정하여 각각의 힘과 모멘트를 계산하여 조류 속도의 변화에 따라 어떻게 배열센서시스템의 자세가 달라지는지 분석해 보았다. 운동은 수평면에서의 운동인 종요(Pitch) 운동만 분석하였다.
배열센서시스템의 선체에 작용하는 외력은 부력, 날개(수평안정판)에 의한 양력, 자중에 의한 중력 및 선체의 각 부분에 작용하는 저항력 및 동체양력이 있다. 저항력은 배열센서시스템의 주선체에 작용하는 저항력, 배열센서에 작용하는 저항력 및 주선체와 배열센서를 연결하는 지지대(Strut)에 작용하는 저항력으로 나누어 볼 수 있다. 주선체와 배열센서는 기울어졌을 때 양력이 생기며 이 양력들은 모두 복원 모멘트로 작용한다. 이중에 주선체에 작용하는 저항력은 종요에 영향을 크게 주지 않을 것으로 판단하여 배제하였다. Fig. 5는 설명한 각 힘들을 자유도로 도시한 그림이다.
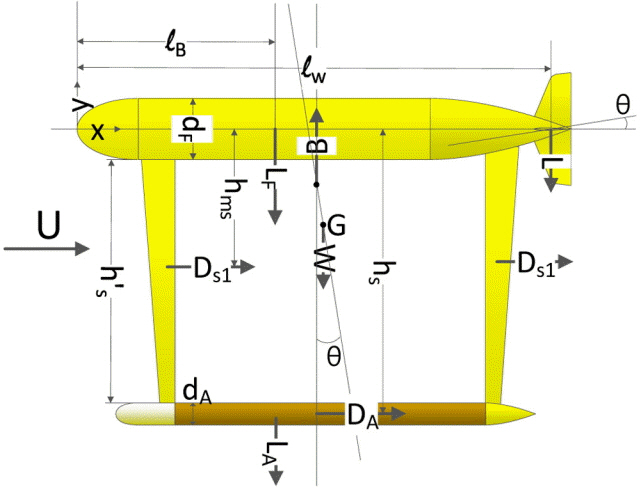
Forces on the array sensor system
조류 속도 U에 의해 발생하는 힘에 의한 모멘트는 종요를 발생시키는 지지대 항력에 의한 종요 모멘트와 배열센서의 항력에 의한 종요 모멘트가 있으며 수평안정판과 선체의 양력에 의한 복원 모멘트, 부력과 무게 중심간의 거리에 의한 복원 모멘트가 있다. 이들 모멘트의 합이 영이 되는 각도가 정상상태의 조류 중에 배열센서시스템이 갖는 종요각이 될 것이다.
주선체 선수 앞쪽에 있는 계류점을 좌표의 원점으로 보고 회전운동의 중심으로 가정하였다. Fig. 5에 표시된 바와 같이 조류속도 U에 의해 종요가 발생하면 그 기울어진 종요각을 θ라 하였다. dF와 dA는 각각 주선체의 직경과 배열센서의 직경을 나타낸다. B와 W는 부력과 자중을 나타내며 L은 날개에 의한 양력을 DA와 Ds1, Ds2는 배열센와 지지대의 항력을 나타낸다. 나머지 기호들은 거리를 나타낸다.
수평 안전판에 의한 양력은 다음 식 (1)과 같이 나타낼 수 있다.
여기서 ρ는 물의 밀도이고 SW는 안정판의 면적이며 sinθ는 평판의 양력 계수이다.
주선체와 배열센서는 모두 유선형 선체이므로 종요에 따라 발생하는 양력은 다음과 같이 쓸 수 있다(Newman, 1977).
여기서 LF와 LA는 각각 주선체와 배열센서의 몸체 양력을, SB와 SA는 몸체의 평면투영면적(Planform area)을 나타낸다.
지지대에 의한 항력은 다음 식 (3)과 같이 나타낼 수 있다.
여기서 항력계수 CS는 지지대 단면이 원형이므로 1.0으로 볼 수 있다.
배열센서의 항력은 단면이 원형인 유선형 선체이므로 그 항력계수를 0.2로 가정 하였으며 다음 식 (4)와 같다.
플랫폼 주선체의 선수를 원점으로 하는 회전 모멘트 평형은 다음의 식 (5)와 같이 표현할 수 있다.
배열센서시스템 플랫폼의 종요를 발생시키는 항력에 의한 모멘트 MD는 다음 식 (6)과 같이 표현 할 수 있다.
이러한 종요 모멘트에 반하여 원래 수평자세로 되돌아가게 하는 복원 모멘트 MR 은 다음 식 (7)과 같이 표현된다.
식 (6)과 (7)이 동일한 절대값을 갖게 되는 θ를 구하면 균일 유속 U에서 배열 플랫폼이 평형을 이루는 각도이다. 이 각도는 다음 식 (7)과 같이 표현 할 수 있다.
식 (8)에서 sinθ에 대해 식을 나누고 θ를 구하면 식 (9)와 같다.
식 (9)에서 상수에 해당하는 각 길이들은 Table 1과 같이 정리할 수 있다. 위의 식에서 종요각 θ는 유속 U를 독립변수로 하는 사인역함수로 표시됨을 알 수 있다.
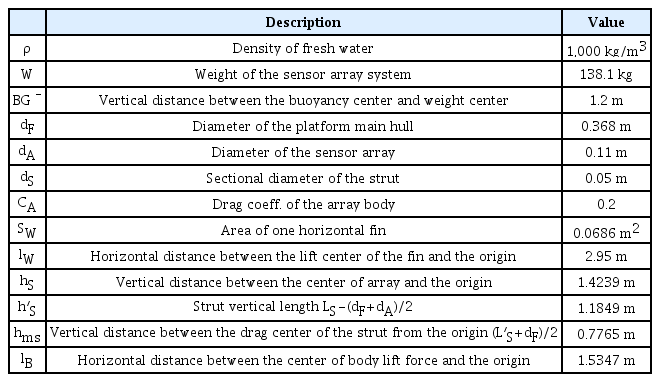
Constants of the array sensor system
실제 제작하여 회류수조에서 시험한 결과와 비교하기 위해 물의 밀도는 청수로 하여 계산하였다.
지지대의 단면 형상이 원형이어서 저항을 많이 받게 되므로 단면 형상을 유선형이 되도록 설계하고자 하였다. Fig. 6에서처럼 지지대 단면 길이()가 직경의 2배가 되는 유선형으로 할 경우 항력계수는 1/3로 줄어든다.
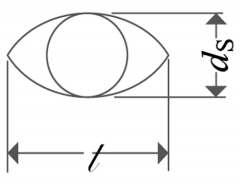
Change of strut cross section
Fig. 7에는 위의 상수 값들로부터 계산한 유속의 변화에 따른 θ의 변화를 보여 주고 있다. 수평안정판의 넓이를 1.5배로 하였을 경우도 지지대의 단면이 변경 된 상태와 같이 도시되었다. 유속은 우리나라 연안에서 발생하는 조석에 의한 조류 일반적 최댓값인 2노트(1.03m/s) 정도 속도인 1.05m/s까지 변화 시키면서 종요 각 θ를 계산하였다.
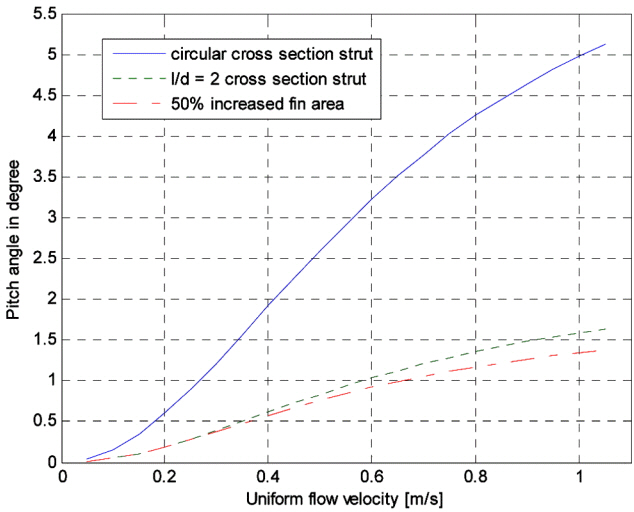
Pitch angle variation of the array sensor platform by uniform flow velocity increment
Fig. 7에 도시된 결과를 검토해 보면 배열센서 플랫폼은 조류속도가 1.0m/s일 때 5도까지 기울어지는 것으로 나타났다. 지지대 단면을 유선형으로 하여 그 저항을 줄이면 점선과 같이 그 종요각이 약 1.6도로 70% 가까이 줄어드는 것을 볼 수 있다. 일점쇄선으로 나타낸 곡선은 지지대 단면을 유선형으로 바꾸고 수평안정판의 면적을 1.5배로 하였을 경우를 나타낸 것이다. 수평안정판의 면적 증가 효과는 그리 크게 나타나지 않음을 알 수 있다.
4. 제작된 배열센서시스템의 회류수조 시험
Table 1에 있는 수치들은 실제 제작된 배열센서시스템 플랫폼의 수치들이다. 주선체의 내부에는 배열센서의 앰프와 신호처리 시스템이 탑재되어 있고 선각은 FRP(Fiber reinforced plastics)로 제작되었다. 전체길이는 3.27m이고 높이는 1.77m이며 공기 중 중량은 Table 1에 나타난 바와 같이 138.1kg이다. 다음의 Fig. 8은 배열센서 플랫폼의 전체적인 크기를 보여주고 있다.
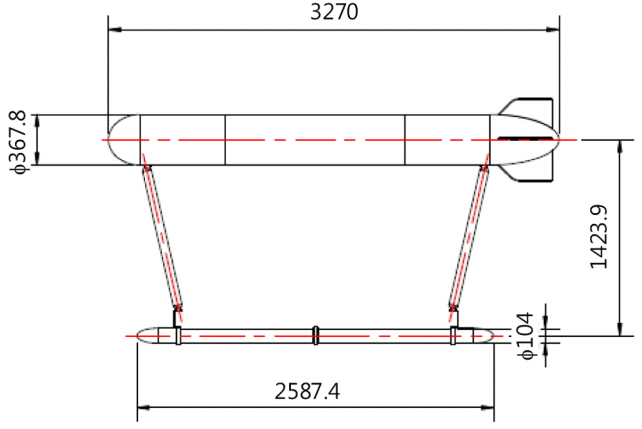
The sensor array platform layout
배열센서 플랫폼의 조류 중 안정성을 확인하기 위해 포항에 있는 수중로봇복합실증센터의 회류수조에서 시험을 수행하였다. 수중로봇복합실증센터의 회류수조 사양은 길이 20미터 폭 5미터 만수깊이 6.2미터 최대유속은 3.4노트(1.75m/s)까지 가능한 회류형 수조이다.
Fig. 9는 배열센서 플랫폼의 사진이다. 포항 수중로봇복합실증센터의 3차원 수조에서는 배열센서시스템의 음향 성능을 먼저 시험 하였다. 사진은 수조에서 시험 전에 크레인에 매달려 있는 상태이다.
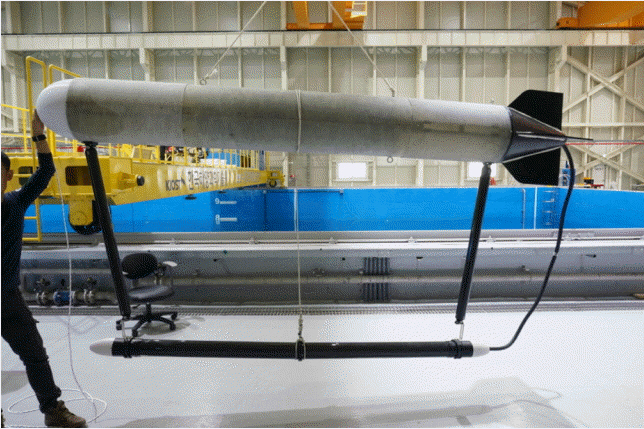
Photo of the sensor array platform
Fig. 10은 회류수조에서 시험 중인 배열센서 플랫폼의 모습을 촬영한 것이다. 계류점에 밧줄을 연결하고 회류수조 전차의 수중 지지대에 연결하여 시험 하였다. 수중에서 중성 부력을 정확하게 맞추기가 어려워 약 40g 정도의 음성부력 상태로 하여 주선체 선미의 밧줄을 연결하여 수조 바닥에 닿지 않은 상태를 유지하도록 하였다. 조류에 의해 요동이 발생하여 선체가 수조 벽에 부딪히는 경우를 방지하기 위해 앞뒤로 밧줄을 연결하여 충돌 시 잡아 줄 수 있도록 하였다.
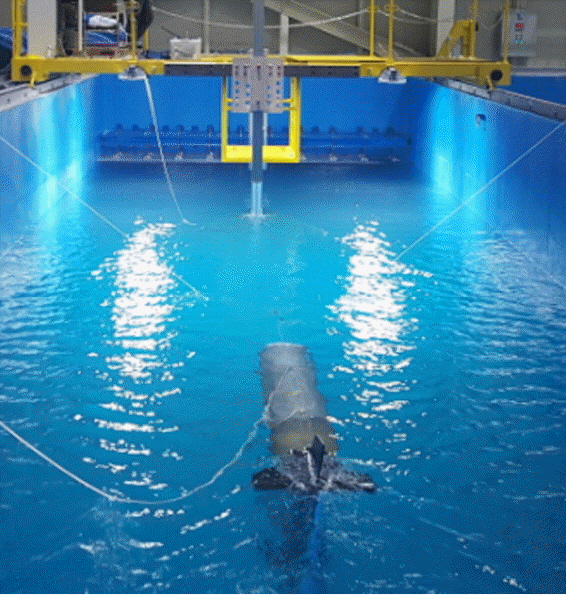
The sensor array platform in the test
시험은 회류수조 자체의 문제로 인해 0.25m/s, 0.5m/s, 0.75m/s의 3가지 조류 속도에 대해서만 시험을 실시하였다. 주선체 내압용기 내부에 탑재된 자세센서의 값을 기록하였다.
제작된 배열센서 플랫폼의 제작 정밀도가 좋지 않아 수평안정판의 상태도 왜곡되어 있었으며 제작사에서 내부에 자세센서를 고정시킬 때 주선체와의 정렬을 제대로 파악하지 못해 정렬이 제대로 되어 있지 않은 상태로 자세 값이 기록 되었다. Fig. 11은 기록된 종요각을 보여주고 있다.
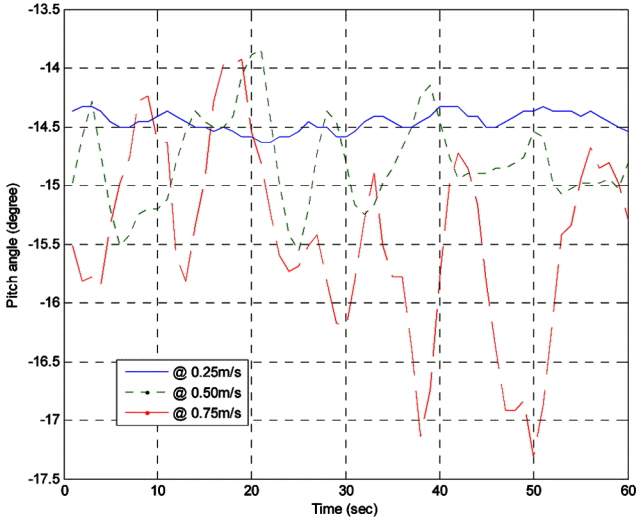
The recorded pitch angle along the each circulation velocities
발라스트가 정밀하지 않아서 정확한 평행상태의 트림 각을 알 수 없었지만 Fig. 7의 실선과 비교해 보면 Fig. 11에서 수평상태는 –13.5도(정렬 편향치)로 나타난 것으로 판단되며 실선으로 표시된 0.25m/s에서의 종요 변위는 최대 1.0도 정도로 변하는 것을 알 수 있으며 Fig. 7의 그림에서 제작된 배열센서시스템의 지지대 단면이 아직 원형인 상태이므로 실선으로 표시된 종요 값에 대해 동일 속도에서 종요각의 변위가 1.0도 정도로 나타나고 있음을 알 수 있다. 또한 Fig. 11에서 0.75m/s의 최대변위는 3.75도 정도로 Fig. 7에서의 4.0도와 유사한 값을 가짐을 알 수 있다. Fig. 11에서 유속이 증가함에 따라 종요각이 주기적으로 변동함을 볼 수 있는데 이는 수평안정판의 왜곡, 지지대에서 발생하는 와류 발생(Williamson and Govardhan, 2004) 작은 왜란에 의한 직진성 회복 효과 등이 혼재되어 발생하는 것으로 생각된다.
5. 결 론
본 논문에서는 개발 중인 배열센서시스템의 운용 방법에 따른 설계 개념을 설명하고 운용할 때 발생할 수 있는 조류 중의 종요각을 예측하였으며 실제로 제작된 플랫폼을 회류수조에서 시험하여 종요각의 변화를 기록하고 예측된 값들과 비교하였다. 비교 결과 설명한 해석 과정은 동적인 문제까지 예측은 어렵지만 수평상태 유지가 중요한 배열센서시스템의 설계에 반영할 수 있는 유의미한 결과를 줄 수 있었음을 확인하였다.
제작된 배열센서시스템은 부력을 조절할 수 있는 기능이 구현되어 있지 않았으며 선체의 제작이 정밀하지 못해 회류수조 시험 결과를 예측 값들과 정확히 비교하기가 어려웠다. 또한 지지대의 항력이 종요에 미치는 영향이 날개의 양력보다 더 크므로 지지대의 단면 형상을 Fig. 6과 같이 변경할 예정이다. 향후 부력조절장치를 부착하고 개선된 플랫폼으로 시험할 예정이므로 더 정확한 비교 시험 결과를 얻을 수 있을 것이다.
Acknowledgements
본 논문은 선박해양플랜트연구소의 주요사업인 ‘중주파수 대역의 배열센서를 이용하는 장거리 수중음향 원격 탐사 핵심 기술 개발’에 의해 수행되었다(PES9410).