복합임무 무인수상정의 개발시험평가 및 검증절차에 관한 고찰
A Study of the Development Test and Evaluation and Verification Procedure of a Multi-Mission USV, M-Searcher
Article information

Trans Abstract
This paper describes the plan and procedure of a development test and evaluation that will be performed to verify the performance and technology of multi-mission unmanned surface vehicles (MMUSVs). In order to verify the design requirement of MMUSVs, we designed and manufactured the common platform of MMUSVs, which have an overall length of8.4 m, a displacement of 3,100 kg, and a speed of more than35 kts. The platform is equipped with several sub-systems, including radar and an EOTS/IRS. The EOTS/IRS, along with the search radar, is used for effective detection, identification, and targeting. The core technologies of MMUSV for DT&E will be investigated. The common platform design technologies, remote operating and control system technologies, autonomous navigation technologies, and unmanned operational technology of sensors and equipment will be studied for the development of the MMUSV’s core technologies. The system will be able to make precise observations and track targets both manually and automatically during day and night conditions. Currently, the verification tests for each of the technologies and for the integrated system are in the pipeline for DT&E, which will be performed next year. Also, software reliability and life tests will be performed.
1. 서 론
군사용으로 개발된 무기체계 또는 시스템(장비)의 시험평가는 그 대상에 따라 체계개발, 핵심기술개발, 신개념기술시범(Advanced concept technology demonstration, ACTD) 사업 그리고 민⋅군 기술협력 사업으로 구분하여 실시한다. 무기체계의 시험평가 업무지침은 국방전력발전업무훈령(Ministry of national defence, MND, 2016)의 시험평가 분야와 관련된 실무 차원의 추가 지침을 제공함으로써 효율적인 시험평가 업무수행을 보장하는데 있다.
체계개발 시험평가는 탐색개발과 체계개발로 단계별로 수행하고, 탐색개발에서는 운용성 확인, 체계개발단계에서는 개발시험평가와 운용시험평가를 수행한다. 운용성 확인은 잠재적인 운용효과와 운용적합성에 관한 의사결정 자료를 제공하기 위하여 실시하며, 개발시험평가는 개발단계에서 제작된 시제품에 대하여 기술상의 성능을 측정하고 설계상의 중요한 문제점이 해결되었는가를 확인하여 기술적 개발 목표가 충족되었는지를 판정한다. 그리고 소요군 주관으로 수행하는 운용시험평가는 개발된 무기체계에 대하여 작전운용성능 충족 여부 및 군 운용 적합 여부를 확인한다.
핵심기술개발 시험평가는 개발단계에서 적용무기체계의 유⋅무에 따라 구분하여 다음과 같다. 첫째, 적용 무기체계가 있는 핵심기술의 시험평가는 개발 중인 경우와 양산인 경우로 구분하여 실시하며, 적용무기체계가 개발 중인 경우는 개발시험평가를 실시하고 운용시험평가는 적용무기체계의 운용시험평가계획에 포함하여 실시한다.
선도형 핵심기술사업(Defense acquisition program administration, DAPA, 2018)의 경우, 민간의 우수기술, 산업경쟁력을 국방연구 개발에 활용하여 미래 무기체계에 적용될 신기술 및 새로운 무기체계 개발에 필요한 핵심기술을 신속하게 확보하기 위하여 선도형 핵심기술사업을 추진하고 시험평가 대상 여부는 프로그램 개발 기본계획서에서 명시하여 시험평가는 프로그램 단위로 실시한다. 시험평가 절차는 핵심기술 연구개발의 시험평가 절차를 준용한다. 본 연구에서는 기술한 “복합임무 무인수상정 기술개발”은 선도형 핵심기술사업으로서 이 절차에 따라 시험평가를 수행한다.
따라서 본 논문에서는 핵심기술 연구개발에 대한 시험평가 업무지침(ROK JCS, 2017)을 적용한 시험평가 계획, 수행, 판정 등에 대한 일반적인 고찰과, 현재 개발 중인 복합임무 무인수상정의 핵심기술인 공통플랫폼, 원격운용/통제, 자율운항, 임무장비에 대한 개발시험평가 및 검증절차에 대해 기술한다.
2. 시험평가 계획수립, 수행 및 판정
2.1 개발시험평가 계획수립
연구 개발 주관기관은 연구개발 계획서 및 시험평가기본계획서를 근거로 필요시 계획검토회의(소요군 포함)를 거쳐 (1) 개발시험평가 개요, (2) 개발시험평가 대상장비 및 수량, (3) 개발시험평가 실시방법, (4) 기간 및 장소, (5) 개발시험평가 항목 및 기준, (6) 실무장 시험 수행 여부, (7) M&S(Modeling and simulation)를 활용한 시험평가, (8) 소요예산, (9) 개발시험평가 인원 구성, (10) 요구도 추적 및 검증관리방안, (11) 기타 협조 및 지원사항 등이 포함된 개발시험평가 계획안을 작성하여 방위사업청(방사청)의 검토를 받은 후 개발시험평가 착수일 60일 전까지 합동참모본부(합참)에 제출하고, 합참은 개발시험평가계획을 확정하여 개발시험평가 착수 1개월 전까지 방사청, 관련기관 및 소요군으로 통보한다(ROK JCS, 2017). Fig. 1은 핵심기술에 대한 개발시험평가 계획수립 절차를 보여주고 있다.
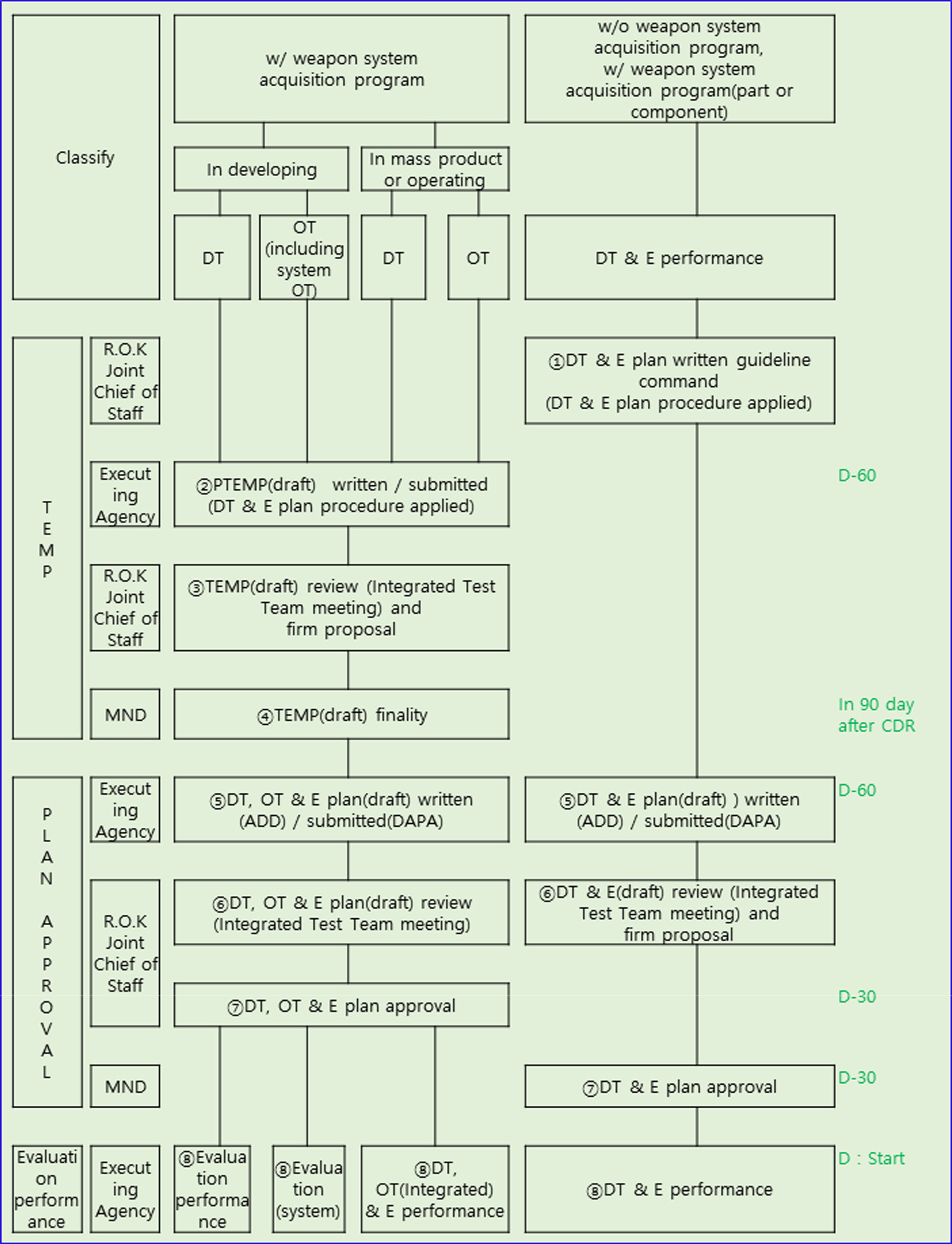
The planning of development test and evaluation for critical technology
개발시험평가 항목은 (1) 무기체계 기능⋅성능시험(작전운용성능시험, 기술적⋅부수적성능시험, 설계검토를 통하여 확정된 기능 및 성능시험), (2) 소프트웨어시험, (4) 환경시험, (5) 핵심부품⋅구성품 신뢰성시험, (6) 소프트웨어 신뢰성시험, (7) 전력화지원요소의 기술적 입증시험, (8) 합동성 및 상호운용성시험 등을 포함한다. 다만, 무기체계의 특성, 시험장 및 시험장비, 환경적 위험에 따른 안전 등을 고려하여 이를 조정할 수 있다.
2.2 개발시험평가 수행
연구 개발 주관기관이 개발시험평가를 하는 경우에는 개발시험평가 수행 15일 전에 시험준비검토회의(TRR, Test readiness review)를 개최함을 원칙으로 하며, 확인된 시험 준비 상태를 합참에 통보하고, 연구개발 주관기관은 확정된 개발시험평가계획서를 근거로 연구 개발 무기체계에 대한 개발시험평가를 수행하며, 합참은 필요시 개발시험평가 수행 간 소요군 관련인원이 입회하도록 조치할 수 있다. 또한 연구 개발 주관기관은 시험평가계획서에 제시된 보고기준에 따라 시험 진행 현황을 방사청을 통해서 합참에 통보하고, 시험 중 관련기관의 의견이 상이할 때에는 방사청이 주관하는 시험 참여 기관의 실무자 회의를 통해 의견을 조정한다. 방사청은 특이사항 발생 시 합참에 통보한다.
2.3 개발시험평가 판정 및 보고
일반적으로 운용성 확인 및 연구 개발 무기체계에 대한 시험평가결과의 판정은 다음과 같이 구분하여 진행된다.
(1) 운용성 확인 : 체계개발 단계 전환 적합성에 대한 전반적인 의견 제시. 이 경우 초기 작전운용성능, 예비 체계운용요구서, 예비 체계운용 시나리오 등을 기준으로 주요 결함사항, 도출된 문제점, 개선 및 발전시킬 사항 등을 파악한다.
(2) 개발시험평가 : 기준 충족 또는 기준 미달
(3) 운용시험평가 : 전투용 적합 또는 전투용 부적합. 다만, 항공기, 함정 등 연구 개발부터 최종 생산까지 장시간 소요되는 사업의 경우에는 연구 개발 중에 후속 단계로 전환 여부(초도양산 승인을 위한 판정), 후속 사업의 추진 등을 결정하기 위하여 잠정 전투용 적합 또는 전투용 부적합으로 결과를 판정한다. 운용시험평가를 초도 및 후속으로 구분하여 실시하는 경우에는 후속 운용시험평가를 실시하여 전투용 적합 여부를 최종 판정한다.
(4) 군사적실용성 평가 : 체계개발 혹은 양산 단계로 전환 가능, 단계 전환 불가
따라서 본 연구에서는 개발시험평가에 대한 판정을 수행하기 위해서는 개발된 기술의 기준 충족 또는 미달 여부를 판정하게 되며, 그 결과는 시험평가 종료 후 30일 이내에 방사청을 통하여, 합참에 보고하면, 합참은 내용을 종합 정리하여 국방부에 보고서로 제출하고 국방부에서는 그 결과를 판정하게 된다. Fig. 2는 핵심기술에 대한 개발시험평가 판정 절차를 보여주고 있다.

The decision of development test and evaluation results for critical technology
3. 복합임무 무인수상정의 개발시험평가 및 검증방안
3.1 선도형 프로그램 구성 및 핵심기술
선도형 프로그램인 “복합임무 무인수상정(MMUSV, Multi-mission unmanned surface vehicle) 기술개발”은 4개의 핵심기술인 단위과제(Unit project)로 구성되며, 각 단위과제는 임무모듈형 공통플랫폼 설계기술(#1 과제), USV(Unmanned surface vehicle) 원격운용/통제기술(#2 과제), 국제해상충돌예방규칙(COLREG, Convention on the International Regulations for Preventing Collisions at Sea)기반 자율운항기술(#3 과제), USV 임무모듈연동기술(#4 과제)로 핵심기술을 대표하고 있으며, 임무모듈형 공통플랫폼 설계기술(#1 과제)에서 다른 3개 과제를 연동/통합한다. Fig. 3은 프로그램을 구성하는 각 과제의 구성도를 보여주고 있다(Park et al, 2015).

Unit projects of the development program for MMUSV
공통플랫폼 설계기술(#1 과제)에서는 무인수상정의 물리적 규격을 도출하고, 플랫폼의 고속/내항성 선형에 대한 설계기술을 개발하며, 동특성 해석을 통한 이론적 연구와 실험을 병행하여 기술을 검증한다. 또한 플랫폼에 탑재되는 임무장비들의 모듈화로 하나의 플랫폼으로 다양한 임무를 수행하도록 최적화 배치를 수행한다.
원격운용/통제기술(#2 과제)에서는 해상무선통신을 이용하여 모함이나 해상기지 통제소에서 일정한 통제거리 내에서 원격으로 지휘통제가 가능하도록 시스템을 구현하고, 무인수상정 플랫폼에 탑재된 각종 센서로 부터 획득한 모든 정보를 통합 처리하여 임무계획을 수립한다.
자율운항기술(#3 과제)은 국제해상충돌예방규칙 준수(Wikipedia, 2018)를 기반으로 무인수상정이 자율적으로 주어진 임무를 수행할 수 있는 기술들을 적용하여 해상에서 타선들과 충돌 없이 자유로이 운항할 수 있는 수준까지 개발한다.
임무장비모듈 연동모듈(#4 과제)은 수상감시정찰과 수중탐색임무 2가지 복합임무를 수행할 수 있도록 임무장비를 모듈화하여 공통플랫폼에 장⋅탈착 가능하도록 구현하며, 임무장비들은 운용성능을 극대화하기 위해 무인⋅유인으로 운용하도록 한다.
3.2 선도형 프로그램의 개발시험평가 계획
복합임무 무인수상정의 개발시험평가는 선도형 프로그램 기본계획서 및 핵심기술 연구 개발 계획서에 기초하여 기술 요구 성능과 개발 목표의 충족 여부를 확인하는 공식적인 활동이다. 개발시험평가 계획서는 시험평가 개요, 대상장비, 수량, 기간, 장소, 항목, 기준, 소요예산, 기타 협조 및 지원 사항, 안전 및 보안대책 등을 서술한 문서로서 방사청, 합참의 검토(확정 건의), 국방부 승인 및 개발시험평가 수행의 근거 및 기준이 된다.
현재, 시험평가 계획서가 확정되지 않았기 때문에 개발시험평가계획(안)으로 준비 중이며, 계획수립, 개발시험평가 수행, 결과 보고 등 개발시험평가와 관련한 모든 활동은 국방전력발전업무 훈령(MND, 2016) 및 무기체계 시험평가 업무 지침(ROK JCS, 2017에 따라 수행한다. 또한 소프트웨어 시험평가 항목은 무기체계 소프트웨어 개발 및 관리 매뉴얼(DAPA, 2016)을 적용한다. 단, 본 연구에서는 연구계획서 승인 당시(2015)에 무기체계 소프트웨어 개발 및 관리 매뉴얼(DAPA, 2014)을 적용하도록 반영되어 있기 때문에 이 기준을 적용한다.
개발시험평가 항목 및 기준은 합참, 해군, 방사청 등 관계기관과 검토⋅협의를 거처 핵심기술 연구 개발의 기준서인 프로그램 기본계획서 및 각 단위 과제별 연구 개발 계획서를 적용하여 확정한다.
3.3 선도형 프로그램의 개발시험평가 수행
3.3.1 개발시험평가 일반원칙
(1) 국방전력발전업무 훈령(개정 2016. 11. 23) 제1975호에 따라 개발된 기술 또는 장비에 대하여 요구 성능, 개발 목표 등의 충족여부를 확인하는 개발시험평가를 실시한다.
(2) 국방전력발전업무 훈령에 따라 프로그램 단위의 개발시험평가로 사업을 종결하게 되며, 개발시험평가계획만 수립하며, 개발시험평가 항목은 국방전력발전업무 훈령의 규정에 따라 설정한다.
(3) 개발시험평가 기준은 국방전력발전업무 훈령에 따라 선도형 프로그램 기본계획서, 연구 개발 계획서상의 시제품 요구 성능 및 개발 목표 충족 여부를 검증해야 한다.
(4) 소프트웨어 신뢰성 시험은 무기체계 소프트웨어 개발 및 관리 매뉴얼(방위사업청 매뉴얼 2014-1)을 적용한다.
(5) 시험 환경 또는 시험시설 등의 이유로 개발시험평가 수행이 제한되는 경우 국방전력발전업무 훈령에 따라 검증, 확인, 인정 절차가 적용된 M&S를 활용할 수 있다.
3.3.2 개발시험평가 방침
(1) 본 사업에서 제작한 통합 시제를 대상으로 개발된 기술의 개발 목표 충족 여부를 확인하기 위하여 기술‧성능시험과 소프트웨어 신뢰성 시험을 수행한다.
(2) 개발시험평가는 합참의 조정⋅통제 하에 국방과학연구소(국과연) 주관으로 수행하며, 국과연에서 선정한 시험시설 및 장소에서 실시한다.
(3) 핵심기술 과제별 연구 개발 주관기관이 개발 과정에서 자체적으로 실시하는 각종 검증, 확인, 시험 활동 등은 개발시험평가 착수 이전까지 완료해야 하며, 개발시험평가 관련 일정은 개발기관, 개발시험평가 주관부서, 사업통제부서, 개발시험평가 통제부서 등 관련되는 기관의 여건에 따라 변경될 수 있으며, 변경 시 원활한 업무수행을 위해 관련 기관에 사전 통보해야 한다.
(4) 개발시험평가 수행 중 계획상의 명백한 오류나 비정상적인 상황 발생 시에는 관련 내용을 시험평가 통제부서(합참)에 통보하고 관계기관 회의를 통하여 제반 문제를 해결한다.
(5) 개발시험평가 수행 중 결함 발생 시 본 문서에 명시된 절차에 따라 조치하고, 결함 해소 시 해당 항목을 재평가 실시한다.
(6) 소프트웨어 신뢰성 시험(Kristen, 2008; Manohar, 2016)은 소프트웨어 형상 항목(CSCI, Computer software configuration items) 단위로 실시하는 것을 원칙으로 하되, 동적 시험의 경우 소프트웨어 구성품(CSC, Computer software component) 또는 단위소프트웨어(CSU, Computer software unit) 단위로 적용할 수 있다.
(7) 소프트웨어 신뢰성시험은 장기간이 소요될 수 있으므로 개발시험평가 이전에 착수할 수 있으며, 이 경우 연구 개발 주관기관은 소프트웨어 시험계획서(STP, Software test plan)를 승인 받은 후 수행해야 한다. Figs. 4-5는 소프트웨어 개발 프로세스와 단계별 수행활동을 보여주고 있으며, 본 사업에서는 핵심기술 연구 개발이기 때문에 운용시험평가(OT, Operational test)와 규격화 활동은 제외된다.
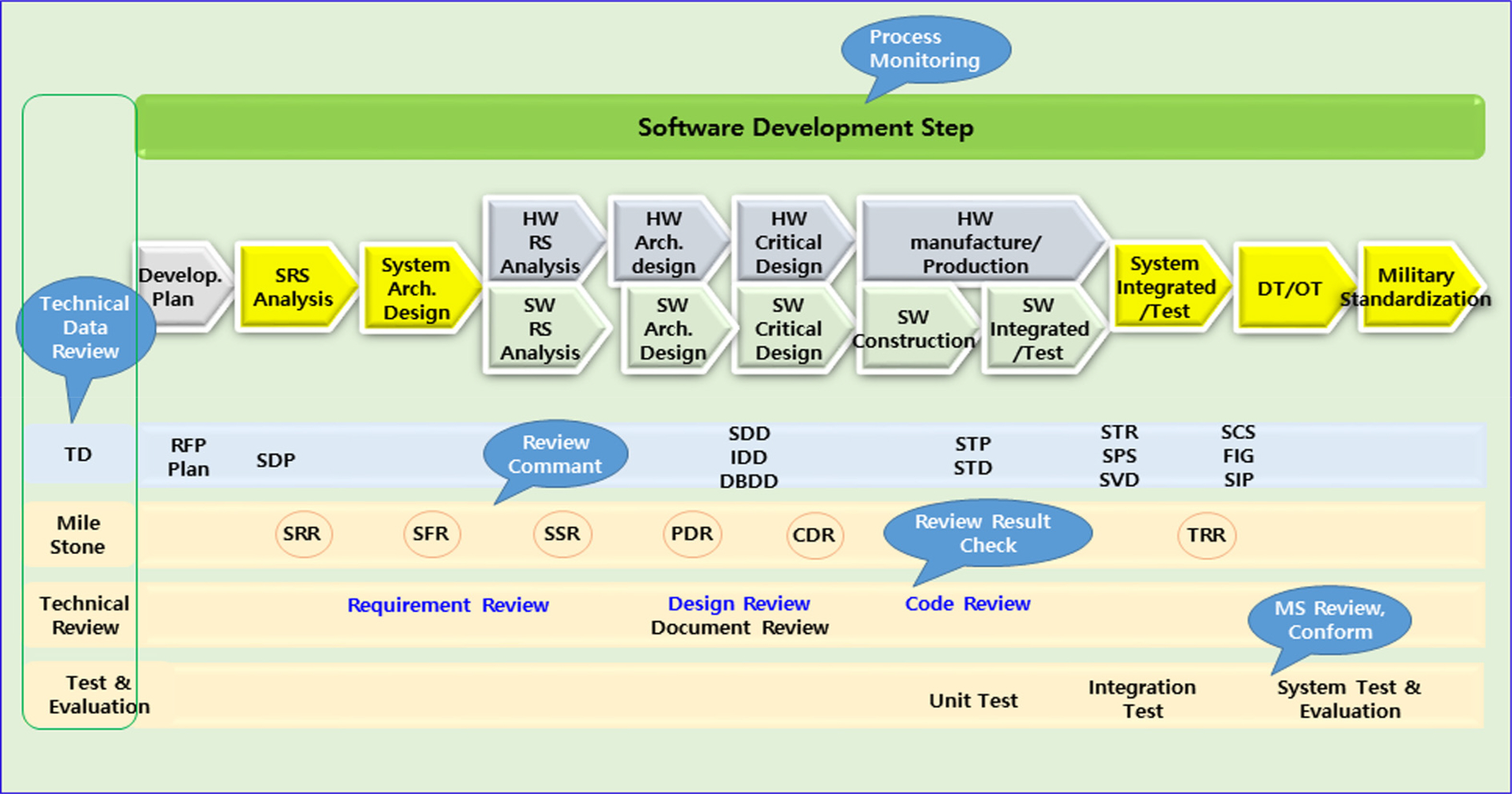
Software management process for the development of weapon system

Software development activities of development step for weapon system
(8) 개발시험평가 주관기관은 개발시험평가에 대한 각 시험항목의 평가방법, 평가기준, 그리고 시험절차 등을 포함한 절차서를 시험준비검토회의(TRR) 이전까지 작성한다.
(9) 개발시험평가 주관기관은 개발시험평가계획(안) 작성 시 개발시험평가 과정 중 예상되는 각종 안전사고 위해요소를 식별하고 이에 대한 안전조치 및 대책을 포함해야 한다.
(10) 개발시험평가 수행 중 개발 장비의 결함 또는 이상으로 발생하는 장비, 인원에 대한 안전 책임은 해당 장비의 개발 주관기관에 있다.
3.3.3 개발시험평가 대상기술
본 선도형 프로그램에서 식별된 개발시험평가 대상기술은 Table 1과 같다. 플랫폼 설계는 개별 단위 과제에 대한 요구사항을 분석하여, 공통플랫폼 요구조건 및 성능을 구현하기 위해 타 단위과제 즉, 원격운용통제(#2 과제), 자율운항(#3 과제), 임무모듈(#4)의 3개 과제에서 수행된 하드위어 및 소프트웨어를 통합하여 복합임무 무인수상정 기술을 대상으로 검증한다.

Critical technologies of development test and evaluation for MMUSV
3.3.4 개발시험평가용 시제품 및 단계별 시험
본 사업에서 개발된 핵심기술에 대한 개발시험평가를 수행하기 위해서는 먼저 각 단계별 구성 요소의 검증시험이 필요하며, 각각 다음과 같이 단계별 검증시험을 수행한다.
(1) 공장수락시험(Factory acceptance test, FAT)
사업 착수부터 시작하여 요구사항 분석, 기본설계, 그리고 상세설계 및 제작된 시제품에 대해 사용자 요구사항을 만족하는지 시제업체 주관으로 육상(공장)에서 검증하는 시험이며, ‘18. 1월부터 약 2개월에 걸쳐서 수행하였다. Fig. 6-7은 플랫폼과 자율운항장치의 공장수락시험을 수행한 것을 보여주고 있다.

Factory acceptance test for MMUSV

USV and test control center moving on land
(2) 단위기술시험(Unit technology test, UTT)
공장수락시험이 시제업체 주관으로 수행되면, 국과연 주관으로 단위과제에서 개발된 대상기술에 대해 육상, 내수면, 또는 해상에서 성능시험을 각 단위과제별로 수행하며, 핵심기술들을 검증한다. Fig. 8은 내수면에서 플랫폼의 기본성능시험을 수행한 것을 보여주고 있다.

USV maximum speed test on the lake
(3) 통합기술시험(Integrated technology test, ITT)
통합기술시험은 각 단위과제에서 개발된 하드웨어와 소프트웨어를 하나로 통합하여 시험평가 대상 핵심기술을 해상에서 검증한다.
(4) 개발시험평가(Development test and evaluation, DT&E)
개발시험평가는 선도형 프로그램인 ‘복합임무 무인수상정 기술’에 대한 연구 개발목표 및 목표성능 충족여부 확인하는 공식적인 시험으로서 시험시제를 대상으로 국방부의 승인된 개발시험평가 계획서에 따라 수행한다.
3.3.5 개발시험평가 항목 및 기준
본 과제의 선도형 프로그램에서 개발된 핵심기술에 대한 시험평가 항목, 기준, 방법, 시험평가 자원 등 세부내용은 연구 개발 계획서에서 기술하고 있으며, 개발시험평가계획서(안)은 작성 중에 있다. Table 2는 기본계획서에 기술된 핵심기술에 대한 시험평가 항목 및 기준을 요약한 것이다(Lee et. al. 2017).
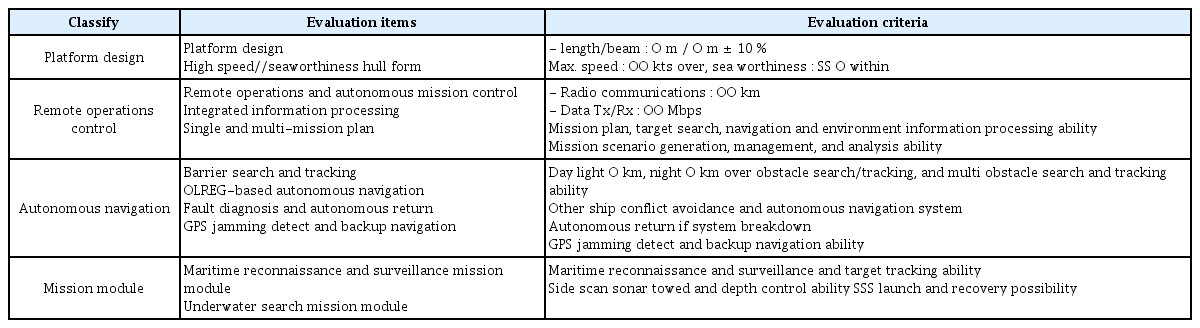
The items of development test and evaluation for MMUSV
3.3.6 개발시험평가 검증방법
시험평가 검증방법은 무기체계 시험평가 업무지침(ROK JCS, 2017)에 따라 아래와 같은 방법으로 정의된다.
(1) 검사(Inspection) : 체계, 부체계, 구성품, 기타 사항(단순 수량의 확인 포함) 등에 대하여 육안으로 확인하는 것으로서 관련 문서, 성적서를 확인하여 사전에 정의된 기준과 비교하는 것이다.
(2) 시험(Test) : 체계, 부체계 및 구성품에 대하여 성능 검증을 위한 세부 데이터 및 성능 검증 정보를 시험평가 대상 체계 외부의 별도 시험장비, 계측장비 등의 장비와 도구를 이용하여 정량적 수치를 획득하여 검증하는 것이다.
(3) 시연(Demonstration) : 체계, 부체계 및 구성품에 대하여 사전에 정의된 기준에 따른 동작 상태를 확인하는 것이다.
(4) 분석(Analysis) : 수학적 계산, 통계적 분석, M&S 또는 기입증된 유사 장비와의 비교 및 획득된 자료를 종합적으로 활용하여 입증하는 것이다.
본 사업에서 개발된 핵심기술은 위의 4가지 방법으로 항목에 따라 검사, 시험, 시연 및 분석을 통하여 검증하며, 경우에 따라서는 중복하여 검증한다.
4. 결 론
선도형 프로그램인 “복합임무 무인수상정 기술개발” 사업은 공통플랫폼, 원격운용/통제, 자율운항, 임무장비 등 4개의 단위과제로 구성되어 있으며, 각 단위과제의 핵심기술을 확보하기 위해 공통플랫폼 설계기술, 원격운용통제기술, 자율운항제어기술 및 임무장비 연동기술 등으로 구분하여 개발하였다.
본 논문에서는 현재까지 요구사항분석, 기본설계, 그리고 상세설계 및 시제작한 시험용 시제품을 이용하여 개발된 핵심기술을 검증하기 위한 국방 분야의 적용무기체계에 대한 개발시험평가 절차와 규정을 살펴보았고, 개발시험평가 대상기술, 항목, 내용 및 기준 등을 세부적으로 기술하였다.
본 선도형 프로그램을 통해 개발된 복합임무 무인수상정 핵심기술은 향후 체계개발이 예상되는 항만/기지용 무인수상정, 소해용 무인수상정, 함정탑재용 무인수상정, 전투용 무인수상정 등에 활용이 가능하여 미래 대한민국 해군 전력 향상에 크게 기여 할 것이다.