1. 개 요
우리나라에서는 1982년 12월에 채택된 유엔해양법협약에 따른 주권 해역의 과학적 조사 자료를 확보하고, 해양 부존자원 및 에너지 개발 등 해양 개발을 위한 기초자료 제공, 해상교통의 안전항로 확보, 해양환경 보존 및 해양 정책 수립 등에 필요한 정보를 제공할 목적으로 국립해양조사원에서 1996년부터 연차적으로 국가해양기본도조사를 실시해 왔다. 수로는 한국해양조사원에서 지속적으로 해도를 제작 및 구축하고 있다(Doopedia, 2019).
국가해양기본도 조사에서 발견된 항해 위험물에 대한 식별은 안전 항로 확보와 해양환경 보존 측면에서 필수적이다. 또한, 미식별 위험물은 우리나라 전 해역에 걸쳐 상당수 존재하고 있어 이를 식별할 표준 절차와 로드맵 작성이 선행되어야 한다. 본 연구에서는 소형 ROV(Remotely operated vehicle, 무인잠수정)를 이용한 해저 미확인 물체의 식별에 필요한 하드웨어, 소프트웨어, 사람 등을 표준화된 방법으로 절차를 작성 및 관리하기 위해 IDEF0(Integrated DEFinition 0) 기능 모델링 방법(Function modeling method)을 채용했다. IDEF0 방법은 조직이나 시스템의 의사결정, 행동, 활동을 모델링 할 수 있도록 디자인 되어 관련된 사람들 간의 의사소통을 촉진하고 활동에 관한 업무의 흐름을 명확하게 표현할 수 있는 장점이 있다(Dynamic Soft Inc., 2011). 이러한 방법을 사용하여 ROV 운영회사마다 각기 다른 석유생산기지의 철골구조물 안전도 검사의 표준절차를 제안하여 보다 효율적인 관리를 수행하고자 한 선행연구 사례가 있다(Rocha and Tome, 2015).
본 논문의 2장에서는 IDEF0 기능 모델링 방법으로 소형 ROV를 이용한 항해 위험물의 시범조사 절차에 대해서 제안했고, 3장에서는 제안한 절차를 이용하여 2018년 9월 18일 대부도 앞바다에서 4톤급 낚시어선을 지원모선으로 위험물(No. 16)에 대한 소형 ROV 조사 수행결과를 나타냈다. 4장 결론에서는 IDEF0 모델링 기법으로 설계한 절차에 대해서 실제 적용평가 결과 및 향후 관리방안에 대하여 작성하였다.
2. IDEF0 방법
2.1 IDEF0란?
IDEF0는 1970년대 미 공군의 ICAM(Integrated computer – aided manufacturing) 프로젝트 일환으로 개발된 기능 모델링 방법으로 시스템의 획득, 분석, 설계, 실험을 지원하는데 필요한 활동을 모형화하기 위하여 고안되었다. 따라서 IDEF0는 조직화된 접근법으로 현존하거나 계획된 시스템의 역할과 역할들 간의 관계를 표현한 것으로 사람들 간의 의사소통 및 이해를 원활히 하기 위한 수단으로 사용된다(The National Institute of Standards and Technology, 1993).
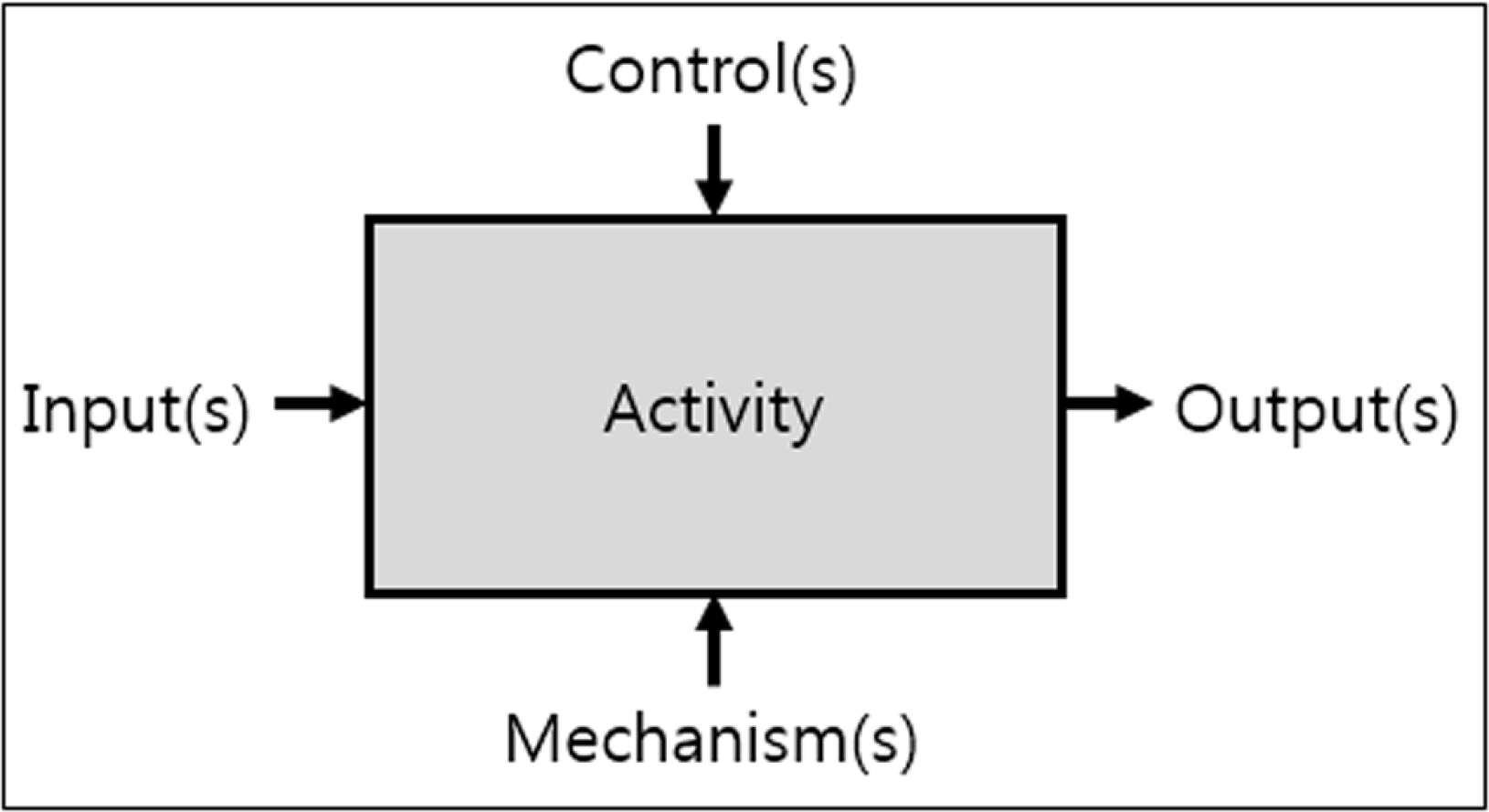
Fig. 1은 IDEF0 모델의 상단 레벨이며 시스템에 대한 가장 일반적인 설명으로 네 가지 화살표 ICOM(Input, Control, Output, Mechanism)으로 나타낸다. 가운데 상자는 활동, 절차, 운영 등 사람, 기계, 컴퓨터 등에 의해 수행되는 기능(Function)을 나타낸다. ICOM의 Input은 기능을 수행하는데 필요한 객체 혹은 데이터를 나타낸다. Control은 기능의 수행을 통제하는 규정, 표준 등을 나타내며, Output은 Function에 의해 만들어지는 객체 혹은 데이터이다. 마지막 Mechanism은 기능을 수행하는 사람 또는 개체 혹은 프로그램 등을 나타낸다(Ismail et al., 2010).
2.2 IDEF0 방법론을 이용한 식별절차 제안
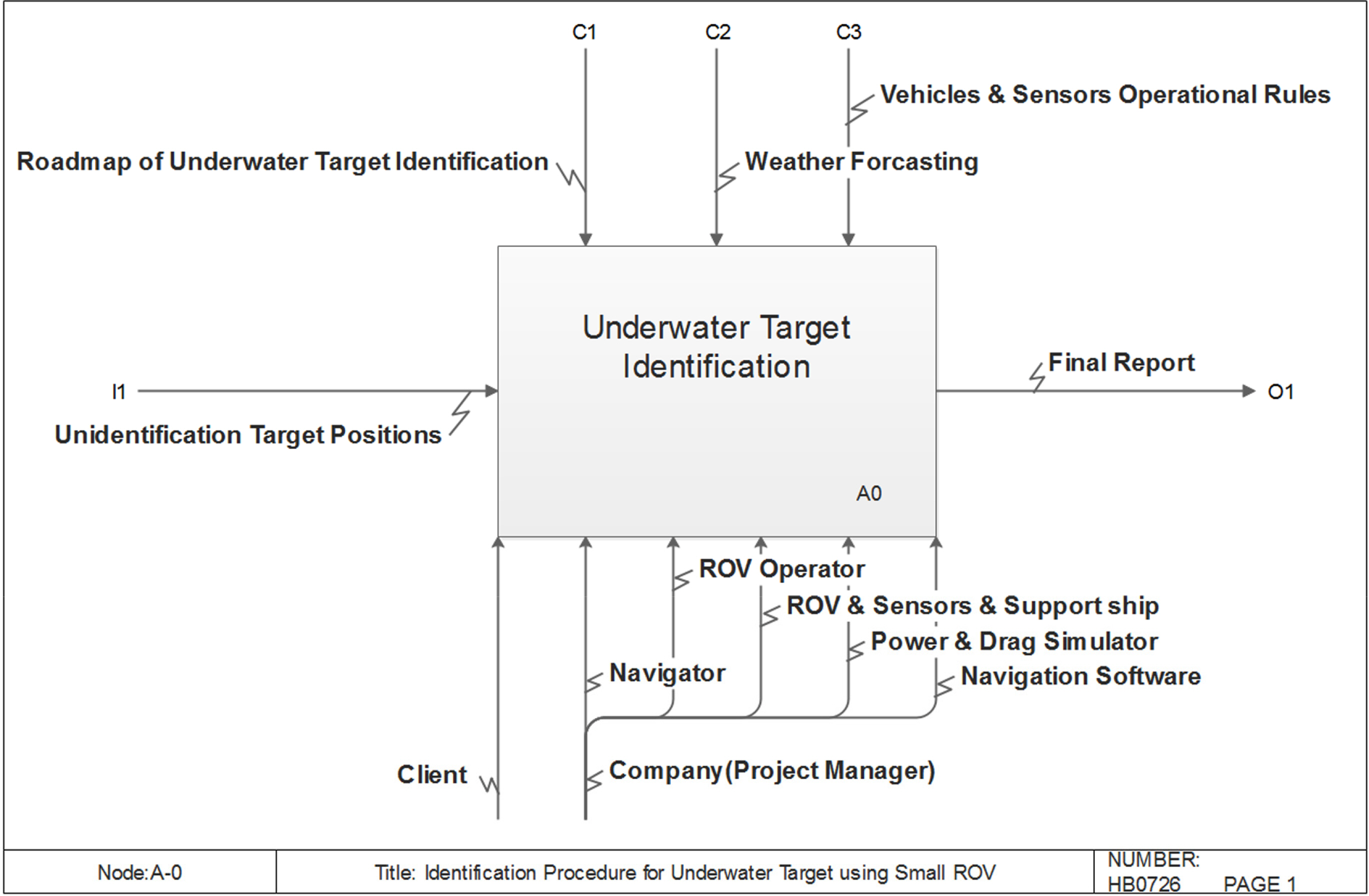
본 논문에서 제안하는 위험물의 식별 절차를 IDEF0 모델링(개요)으로 Fig. 2에서 나타내고 있다. 좌측에 Input 데이터로는 미식별 위험물 위치좌표가 주어지고, 기능 상자(Underwater target identification)에 의해 식별보고서가 Output으로 나오는 구조를 가진다. 상측의 Control에는 위험물 식별 로드맵, 기상정보 그리고, 잠수정과 센서 운영규정이 있다. 특히 위험물 식별 로드맵은 동해, 남해, 서해의 항로와 항로인근 해저에 존재하는 식별 대상들의 위치, 주변 환경에 대한 자료, 과업지시서 그리고, 운영 표준절차 등을 포함한다. 하측의 Mechanism에는 과업을 지시하는 Client와 소형 ROV를 운영하는 업체로 구성된다. 운영업체는 항법 프로그램을 운영하는 Navigator, ROV를 운영하는 Operator, 실해역 시범조사에 투입되는 장비를 나타내는 ROV & Sensors & Support ship, 유속과 수심을 이용하여 소형 ROV 투입 가능여부를 결정하는 Power & Drag simulator, 실시간 항법데이터를 나타내고 저장하는 Navigation software를 제공해야 한다.
3. 실해역 조사 결과
본 장에서는 국립해양조사원의 요청으로 수행한 서해 No. 16번 위치에서 소형 ROV를 이용한 위험물 식별 시범조사 결과를 5단계로 정리했다. 시범조사는 2018년 9월 18일 인천 대부도 앞바다에서 수행했다.
3.1 환경평가
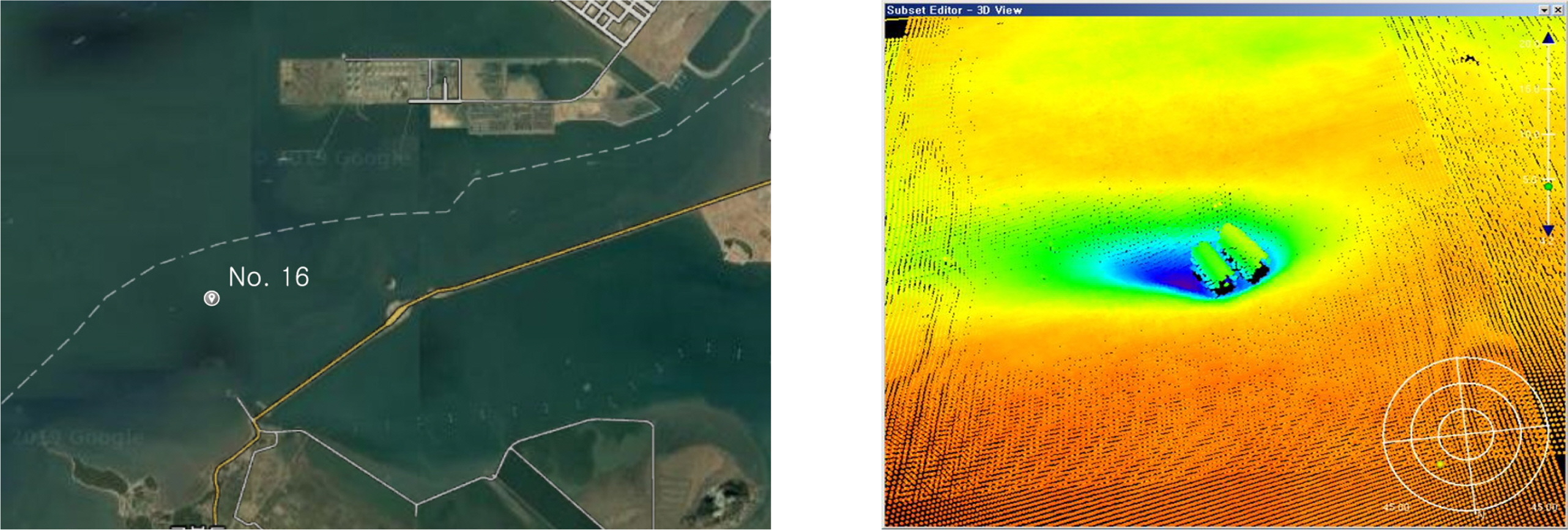
첫 번째 단계인 환경평가에서는 미확인 위험물 식별 로드맵에서 우선순위가 높은 위험물 좌표가 주어진다. 이 좌표가 있는 해역의 자료들을 수집하여 ROV 운영 계약자는 감독관(제3기관 혹은 ROV 전문가)과 함께 환경평가를 수행한다. 수집 자료로는 멀티빔데이터, 유향, 유속, 조위표, 수심정보 등이 있겠다. No. 16번 지역은 대부도 인근 해역으로 아래 Fig. 3의 좌측 구글어스 지도에서 표시된 No. 16 지점이다.
3.2 ROV 선정
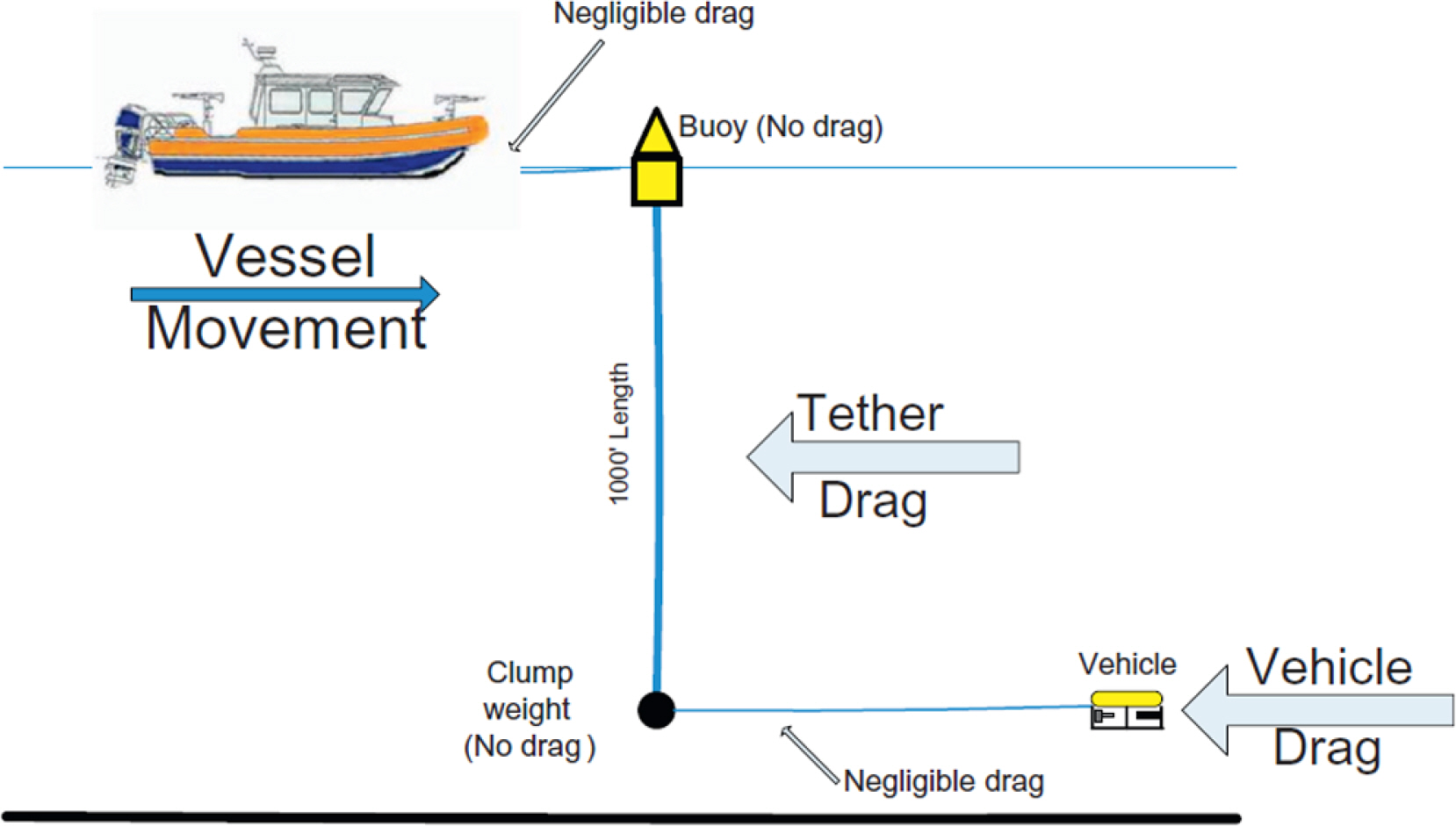
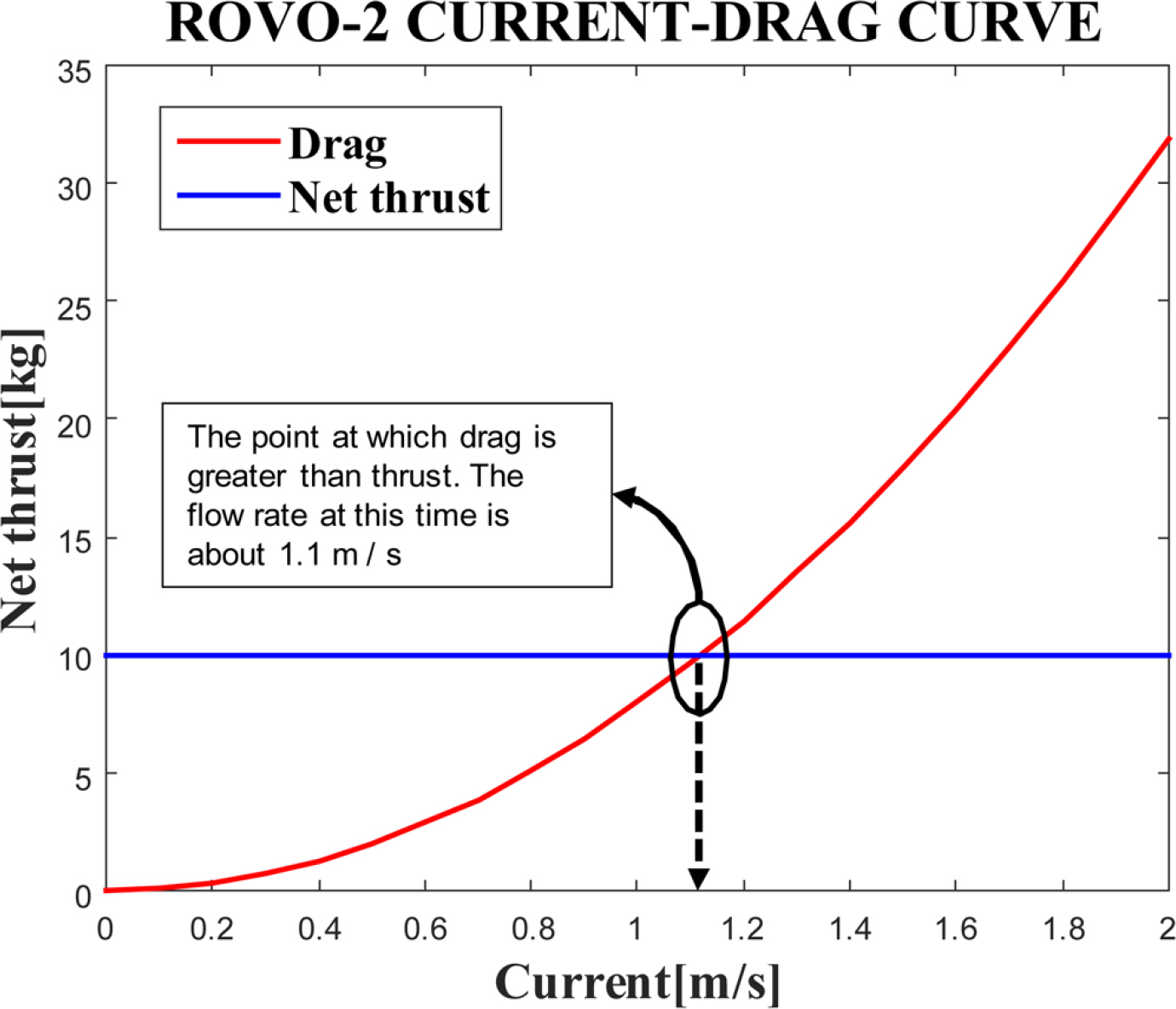
본 시범조사의 환경평가 단계에서 조사된 자료를 바탕으로 조사대상 위험물의 위치, 크기, 형상, 수심 정보와 주변 해역의 유속, 탁도 정보를 입력 값으로 사용하여 ROV의 요구 성능을 정한다. 멀티빔데이터에 나타난 대상 물체는 대략 폭 2미터 길이 5~6미터 크기의 두 개 물체로 나타났다. 서해의 탁한 시계에서 운영하므로 광학영상 장비는 근접하여야 대상을 볼 수 있으므로 전체 대상을 한 번에 볼 수 없는 단점이 있다. 이를 보완하기 위해 이미징 소나가 요구된다. 특히 이미징 소나는 실시간으로 소나 이미지를 보여주므로 탁한 시계에서 항법과 물체 식별(크기, 형태)에 큰 장점이 있다. 또한, 수중 위치측정을 위한 USBL(Underwater short base line) 센서가 필요하다. 이와 함께 수중의 소형 ROV 운용 가능여부를 결정하는 중요한 요소는 ROV 추력과 항력의 관계이다. 이것은 운영방법이 결정된 상태에서 계산이 가능하며, 본 시범조사에서는 Fig. 4와 같은 운영방법을 채용했다. 이 운영 방법은 일반적인 소형 ROV가 해저를 조사할 때 이용하는 방법으로 전체 항력 계산에는 Tether cable 항력과 사용 ROV 항력 이외에는 고려하지 않는다. 두 항력의 합은 식 (1)과 같다(Robert et al., 2014).
여기서, 아래첨자의 R과 T는 각각 ROV와 Tether cable을 의미하며, σ는 해수 밀도와 중력가속도의 비의 값으로 정의된다. Cd는 항력계수로 ROV는 단면적을 고려하여 0.8 ~ 1.0의 값을 가지며, Unfaired cable의 항력 계수는 1.2로 알려져 있다. A는 항력 계수가 작용하는 단면적이며, V는 ROV와 유속의 상대속도이다.
위의 Fig. 5에서 Power & Drag simulation 결과를 나타냈다. ROVO-2 모델의 추력은 사양에 의해 9.97kg으로 나타났으며, 항력은 식 (1)에 의해서 유속이 빨라짐에 따라서 지수함수로 증가한다. 유속 약 1.1m/s에서 항력이 추력보다 커지는 지점으로 ROVO-2 ROV의 운용 한계 유속을 나타낸다. 시범조사해역의 조금 물때 최대유속은 0.5m/s로 나왔다. 또한, 수심이 10m 정도인 시범조사해역을 고려할 때, 시범조사시 운영할 ROVO-2 ROV의 추진기 추력은 현장에서 충분한 여유를 가질 것으로 계산되었다. 추가로 다양한 ROV의 사양을 Power & Drag simulation 한 결과를 본 논문의 부록 B의 Fig. B1과 Fig. B2에 추가했다. Fig. 6과 같이 시범조사에 사용될 ROVO-2 ROV는 가운데 내압유리구에 안에 위치한 Pan/Tilt HD camera 1기와 양쪽 LED 램프 2기가 설치되어 있으며, Blueview 2D 이미징 소나(모델: M900-130)가 설치되어 있다. 소형 ROV의 USBL 항법데이터를 취득하기 위한 센서로 Sonardyne사의 Scout coastal transponder를 설치했다.
3.3 운영계획
3단계 운영 계획은 소형 ROV가 선정된 상태에서 한 지점을 조사하기 위한 육상과 해상에서 이뤄지는 모든 작업에 대한 계획을 말한다. 운영계획을 통해 전체 소요 시간, 비용, 인력에 대한 예측이 가능하며, 계획에는 해상 상황을 우선 고려하여 선박운용계획을 수립한 이후 역산으로 1단계부터 계획을 수립한다. Table 3은 이번 시범조사를 수행하기 위해 작성한 계획이며, 상세한 업무내용과 체크리스트는 생략했다.
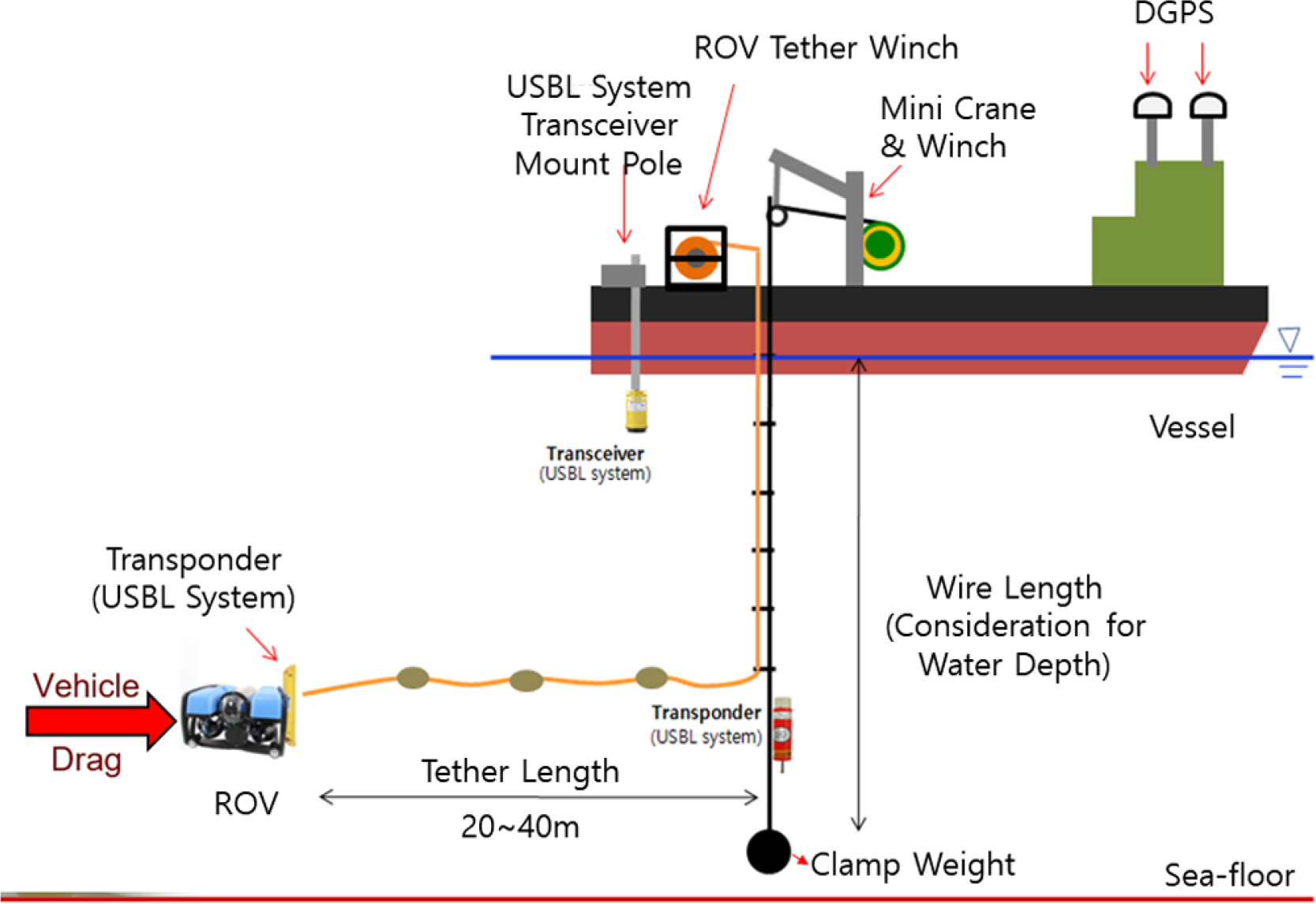
Fig. 7은 계획 단계에서 ROV 운영 업체에서 제안한 소형 ROV의 운영 모식도이다. 강한 조류에 대비해서 Clamp weight를 운용하는 시스템으로 설계하였고, 수직으로 내려가는 테더케이블은 Clamp weight의 연결라인에 의해 구속된다. Clamp weight의 일정 높이로부터 반경 20m에서 40m까지 테더케이블의 길이 조절이 가능하다. 이 방법의 장점은 수심 깊이만큼 수직으로 내려가는 케이블의 유체저항이 ROV에 전달되지 않아 비교적 강조류 환경에서 ROV 운영이 가능한 특징이 있다. 그렇지만, 진수와 인양 시간이 충분히 필요하며, 지원모선이 앵커링하고 있지 않은 상태에서 ROV 운영은 선박의 위치 의존도가 높다는 단점이 있다. 본 실험에서 사용할 지원모선은 선박위치와 선수각(Heading) 정보를 위한 두 개의 DGPS 안테나와 선박에서 ROV의 수중 정밀위치를 모니터링하기 위한 USBL 트랜스폰더의 설치가 요구되어 진다. 이와 함께, ROV 운용관련 컴퓨터와 모니터 등이 설치되어야 하며, 수중에 Clamp Wight등의 물체를 진수·인양할 수 있는 지원모선이 필요하다. 본 연구에서는 일반적으로 구하기 쉬운 4톤급 낚시어선을 소형 ROV의 지원모선으로 선정했다.
3.4 ROV 운영
서해에서 소형 ROV를 운영하기에는 유속이 느릴수록 유리하다. 2018년 9월 18일은 이 달의 무시 물때로 가장 유속이 느린 날이며, 정조 시간에 맞춰 시범조사를 수행하였다. Table 3에서 설명한 운영계획을 이용한 실제 운영에는 Table 4와 같이 총 9일이 소요 되었다. ROV 설치 및 운영에 3일이 계획되어 있었지만, 실제는 2일이 소요 되어 전체 운영일수로는 하루가 짧아졌다. 그러나 영상이미지와 소나데이터의 분석에 1일이 추가 소요되어 전체적으로 동일한 9일이 소요되는 것으로 나타났다.
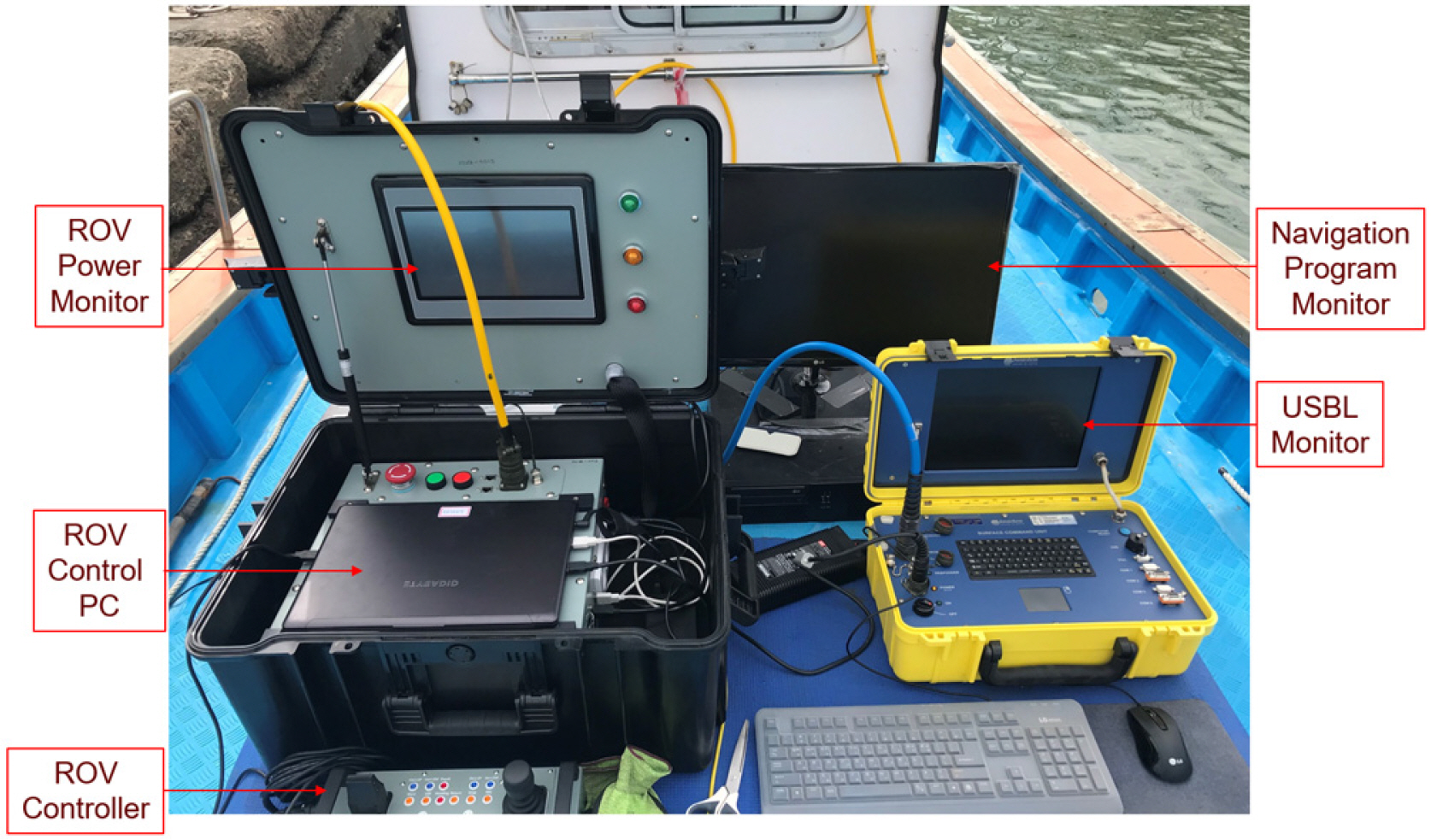
일반적인 과학탐사용 ROV 운영 결과로는 ROV video log, ROV dive log, 선박항해 Log, Mission sensor log가 원본 데이터와 함께 정리되지만, 소형 ROV의 운영 특성상 모든 Log는 항법데이터와 영상데이터, 미션센서(이미징 소나, 멀티빔 등) 데이터의 원본을 저장하는 것으로 갈음하는 것이 운영 투입 인원대비 장비의 원활한 운영에 긍정적일 것으로 판단된다. 갈음 조건으로는 다음의 두 가지가 필수적이다. 하나는 항법데이터는 항법 프로그램에서 저장된 데이터를 Playback 가능하여야 하고, 다른 하나는 ROV 운용에 사용되는 모든 PC와 센서는 운용 전 시간동기화 작업을 수행하는 것이다. 아래 Fig. 8은 선상에 설치된 소형 ROV 제어시스템이다. 좌측은 조종사(ROV operator)의 위치로 전원 모니터, ROV 조종 PC와 그 아래로 ROV 조이스틱이 있고, 우측은 항해사(Navigator)의 위치로 USBL 모니터와 항법 프로그램인 Quincy 프로그램 운용 컴퓨터가 있다.
3.5 식별보고서 작성
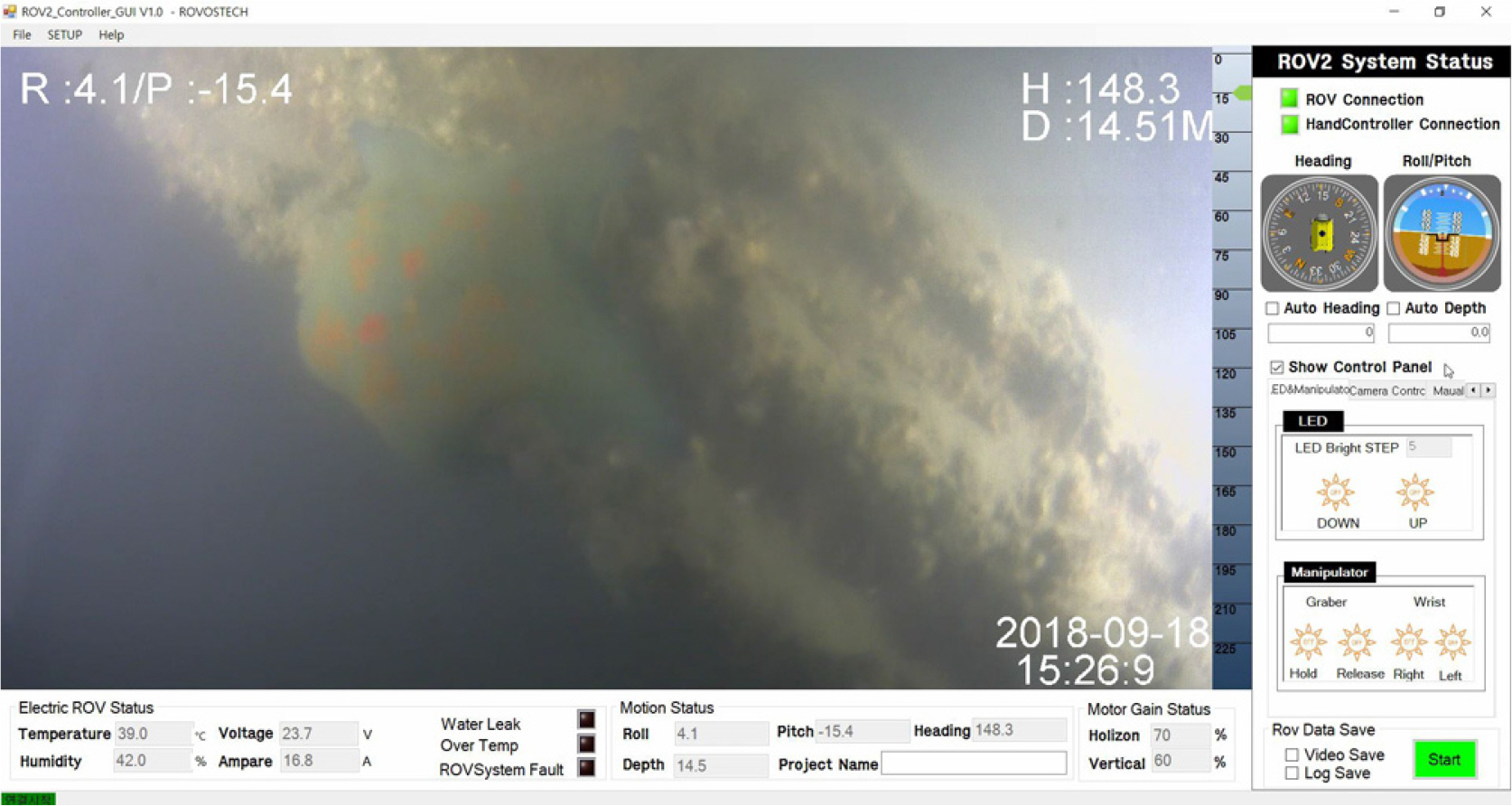
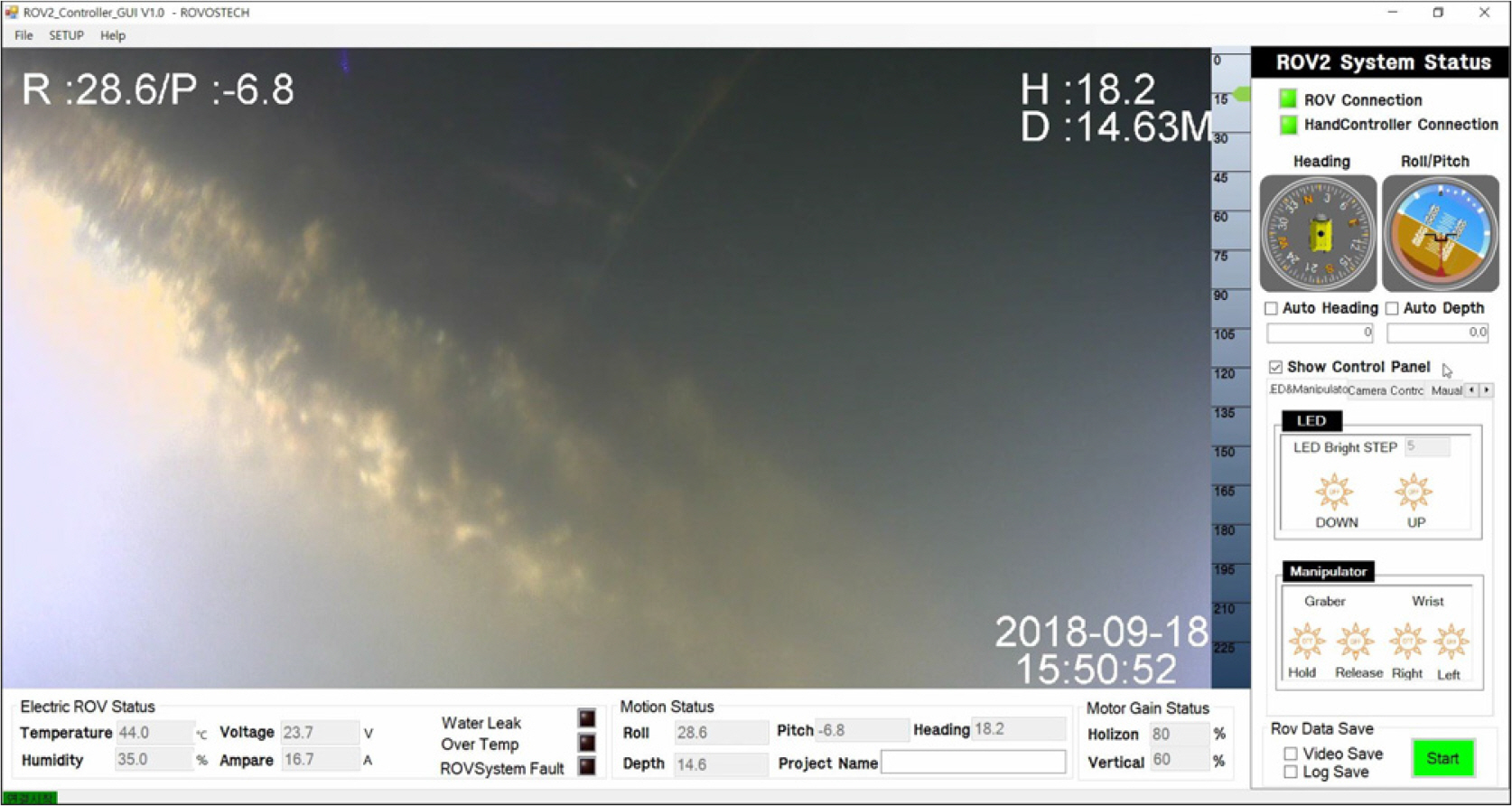
논문에서 제안한 IDEF0 모델링의 마지막 5단계에서는 소형 ROV 시범조사를 통해 취득한 HD 카메라 영상, 이미징 소나 영상, 항법 프로그램 데이터를 이용해 위험물에 대한 식별결과를 정리하는 것이다. Fig. 9의 좌측 그림은 위험물 대상을 ROV로 조사할 때의 항법프로그램 장면이다. 좌측 그림에서 우측 상부의 선박과 위험물 대상 주변을 조사하던 ROV의 USBL 위치데이터 누적 신호를 흰색 점들로 나타냈다.
서해는 육상에서 흘러 내려오는 부유물이 많은 해역으로 빛의 반사(Reflection), 굴절(Refraction), 회절(Diffraction), 산란(Scattering)에 의해 정밀한 영상 촬영이 어려운 곳이다. 이런 곳에서는 정조 시간에 조사하는 것이 좋은 영상을 획득하는데 유리하며, 소나를 이용하는 것이 시각 센서의 대안이 될 수 있다. 시범조사에서 식별 대상을 촬영한 영상중 화질이 좋은 영상을 캡쳐하여 아래의 Fig. 10과 Fig. 11에 나타냈다. Fig. 10은 위험물의 외부 가장자리를 조사하던 사진으로 ROV의 선수각 148.3도 방향(위험물의 북쪽에서 5시 방향)으로 촬영된 영상임을 자막으로 알 수 있다. 가장자리는 계단모양의 층이 나 있는 것 또한 확인할 수 있다. Fig. 11은 위험물 내부 가장자리를 촬영한 영상으로 선수각 18.2도 방향(위험물 남쪽에서 1시 방향)으로 촬영된 영상이다. 내부에도 계단모양의 층이 나 있는 것을 확인했다.
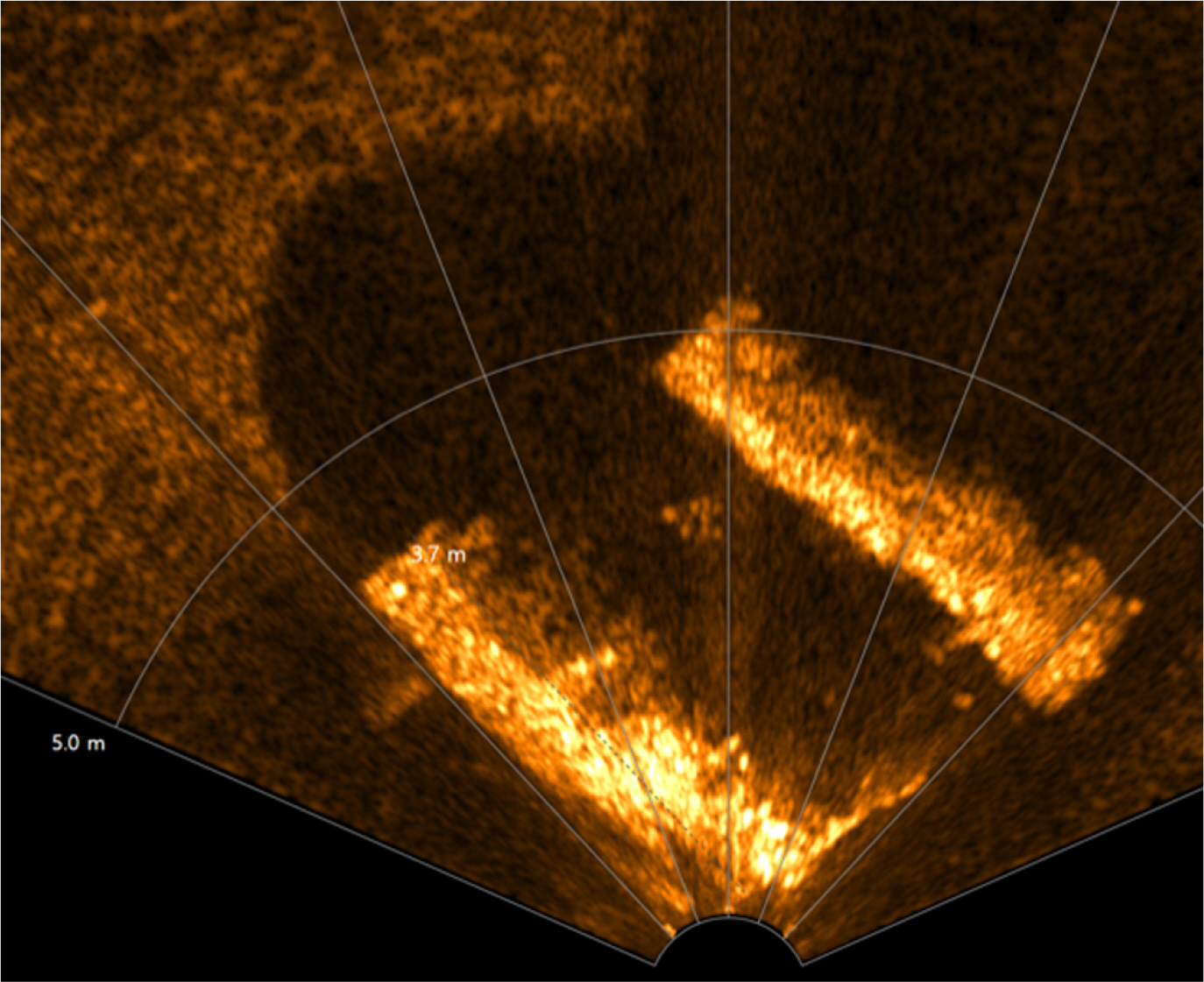
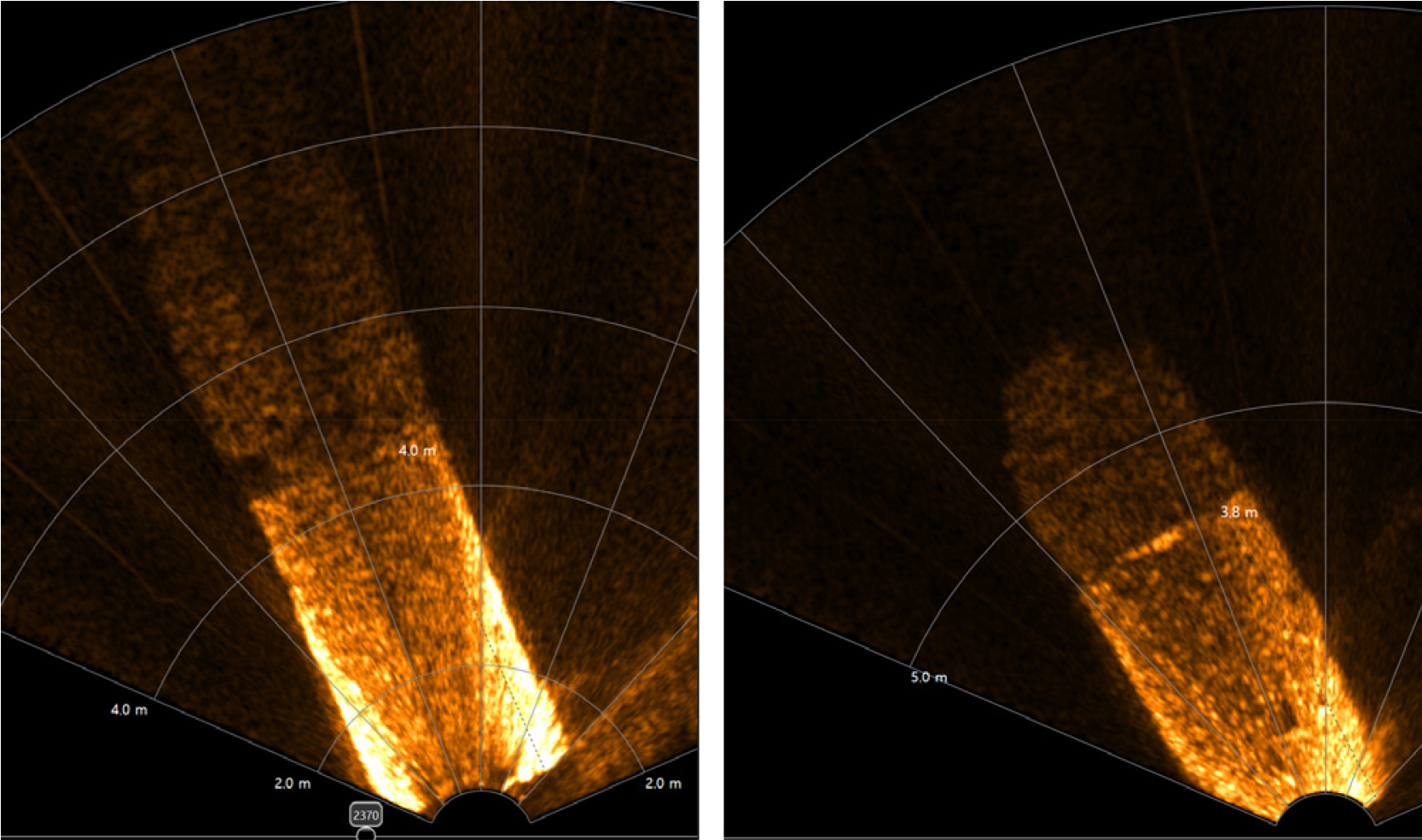
Fig. 3의 우측과 Fig. 9에 표시된 두 개의 미식별 위험물 주변은 세굴(Scouring)현상이 발생된 것을 확인할 수 있다. 세굴은 수중에 인공구조물 설치 시 강한 유체에 의해 발생되는 현상으로 위험물 주변에 흙이 많이 유실된 것으로 보아 무게가 상당할 것으로 추정할 수 있다. 멀티빔 소나는 수면의 선박에서 지구중심 방향으로 음파를 주사하여 고도를 측정하는 방식으로 대상물을 여러 개의 점(Point)으로 표현하는 특징이 있지만, 측면의 정보 취득은 불가능하다. 본 시범 조사에서는 소형 ROV에이미징 소나를 설치하여 Fig. 12와 Fig. 13에서처럼 측면 이미지를 취득할 수 있었다. Fig. 12는 Target A와 Target B 보다 높은 고도에서 촬영된 소나영상으로 멀티빔 데이터와 유사하게 두 개의 미식별 위험물 배치상태를 확인할 수 있었다. 멀티빔과는 달리 Fig. 12의 상부에 표시된 검정색 그림자가 둥글게 나타나므로 Target의 외형은 원통형임을 알 수 있었다. Fig. 13은 두 개의 위험물 측면에서 각각 촬영한 데이터로 원통 형태의 Target 입구에서 내부를 관통하여 반대편으로 뻗어나가는 바닥 반사음향을 확인할 수 있었고, 소나에 가까운 구조물 내벽에서는 강한 반사 신호가 사각형 박스 형태로 나타났다. 이미징 소나 프로그램에서 Target A는 길이 4.0m, 내경 2.2m이고, Target B는 길이 3.8미터, 내경 2.2m로 측정 되었다.
멀티빔 데이터로 알 수 없었던 Target은 영상 촬영을 통해 내, 외벽의 가장자리에 층계구조를 가진다는 것과, 이미징 소나를 통해 내부가 비어있는 둥근 실린더 형태라는 것으로 Fig. 14(CPM-group, 2019)와 같은 콘크리트 배관임을 알 수 있었다.
4. 결 론
No. 16번 위험물 조사를 통해 탁시계 환경에서 선박을 이용한 멀티빔 성과로 식별이 어려웠던 대상을 소형 ROV의 이미징 소나를 이용하여 측면정보를 취득함으로써 식별이 가능했다. 이미징 소나는 실시간으로 영상을 볼 수 있어 ROV 운영자가 항법 데이터로 활용할 수 있고, 길이 측정의 정밀도가 높으므로 대상의 정밀한 크기 측정이 가능하여 소형 ROV에 있어 유용한 센서 임을 확인할 수 있었다. 또한, No. 16번 위험물은 콘크리트 배관으로 식별되었으며, 한 가지 위치 지점에서 소형 ROV를 이용한 대상의 식별에는 예비일 1일~2일을 포함하여 총 10일이 소요되는 것으로 나타났다.
IDEF0 모델링의 목적은 각 단계의 모든 요구 사항과 범위를 정의하고 업무 규칙을 발견, 현행 환경의 문서화, 개선된 대안책 개발, 그리고 다른 분석을 위한 프레임을 제공하는 것이다(Jang and Kim, 1999). 본 논문에서는 IDEF0 모델링 기법으로 소형 ROV를 이용한 항해 위험물의 시범조사 절차와 제안한 절차를 검증하는 시범조사 수행함으로써, 운영 표준 작성에 필요한 전반적인 사항을 점검할 수 있었다.
향후 하층 구조를 보강하고 전체 업무의 절차를 세밀하게 표현할 필요가 있으며, 몇 회 반복하면서 절차를 수정, 업데이트하게 된다면 제안한 표준이 소형 ROV의 운영 표준으로 자리 잡을 수 있을 것으로 기대한다.