


1. ه£ نةب
و¤نة£وبناشهùه£ ن░£هâإوـءنè¤ نéبم░£ نإ ن│┤وàهèج ه║ن╣وàîهإ┤هàءهإ هث╝ن£ هبن░ـ هîهإîهؤهإء وـءنéءنة£ه£, هîهإîهإء م░هîنح╝ هجّهأ¤هï£وـءنè¤ هئبهêءوـذ ن░ م╡░وـذهأر و¤نة£وبناش هجم│ ن░ هب£هئّ هï£ هجّهأ¤وـءم▓î نïجنجهب╕هآ¤نïج(Kuiper, 2001). هإ┤ناشوـ£ نéبم░£ نإ ن│┤وàهèج ه║ن╣وàîهإ┤هàء(Tip vortex cavitation, TVC)م│╝ م┤نبذوـءهùش نزذوءـهب-هïجهب هâم┤م┤م│نح╝ م╖£نزàوـءنè¤ هïجوùءهïإم│╝ م╕░ن│╕هبهإ╕ 2ه░ذهؤ نزذن╕ندهإ و╡وـ£ هù░م╡شم░ هêءوûëنءهû┤هةîه£╝نر░(McComick, 1962; Fruman et al., 1992), هإ┤هû┤ه£ و¤نة£وبناش ن╕¤نبêهإ┤نô£هآ 3ه░ذهؤ هêءهجّهإ╡هùه£ ن░£هâإوـءنè¤ وؤنحء ه£بنآهù نîوـ£ هïجوùء هù░م╡ش(Souders and Platzer, 1981; Arndt et al., 1991; Maines and Arndt, 1997; Astolfi et al., 1999)هآ هبه░ذ م▓╜م│هأ¤هîن▓ـهإ هإ┤هأروـ£ وـ┤هإ هù░م╡ش(Pyo and Kinnas, 1997, Kinnas et al., 1998; Lee and Kinnas, 2001)م░ وآ£ن░£وئê هêءوûëنءهû┤هب╕ هآ¤نïج. م░ وîذن هâهùه£هإء هنوشوàهà£هإ┤ هإ╝هبـوـءنïجم│ب م░هبـوـءنè¤ م╕░هة┤هإء هبه░ذ وîذنن▓ـهإ هإ┤هؤâوـءنè¤ وîذن هéشهإ┤هù ه£بوـ£ه░ذن╢ن▓ـهإ هبهأروـذه£╝نة£هذ نش╝ه▓┤وّ£نر┤هùه£هإء هننح╝ م│هé░وـءم╕░ نـîنش╕هù هإ┤هù ن¤░نح╕ م╖╝ن│╕هبهإ╕ هêءه╣ء هءجنحءنح╝ و¤╝وـب هêء هùنïج. هإ┤ناشوـ£ هêءه╣ء هءجنحءنè¤ هûّنبحهإ ن░£هâإوـءنè¤ نش╝ه▓┤هùه£ وءـهâهإ┤ م╕ëم▓روـءم▓î ن│وـءنè¤ نéبم░£ هـئنéب, نْ╖نéبم│╝ نéبم░£ نإهùه£هإء م│هé░ هبـوآـننح╝ نé«ه╢¤م╕░ نـîنش╕هù هنهآ هــنبحهإ ن│┤نïج هبـوآـوئê هءêه╕ةوـب هêء هئêنè¤ م│به░ذ وîذنن▓ـهإء م░£ن░£هإ┤ هأ¤م╡شنءهû┤هةîنïج. هـئه£ هû╕م╕ëوـءهءنô»هإ┤ هبن░ـهأر و¤نة£وبناشهإء م▓╜هأ░ نéبم░£ نإهùه£ ن░£هâإوـءنè¤ نéبم░£ نإ ن│┤وàهèج ه║ن╣وàîهإ┤هàءم│╝ هإ┤نة£ هإ╕وـ┤ ن░£هâإوـءنè¤ هîهإîهإء هب£هû┤م░ وـهêءهبهإ┤نïج. هإ┤ناشوـ£ هإ┤ه£بنة£ وءـهâ ن░ هنوشوàهà£هإء م╡شوءهù هب£وـ£هإ┤ هùهû┤ نéبم░£ نإم│╝ م░آهإ┤ م╕ëم▓روـ£ وءـهâ ن│وآ¤نح╝ م░ûنè¤ م╡شم░هù نîوـ£ وـ┤هإهإ┤ هئه£بنةصم│ب هêءه╣ء ن»╕ن╢هù هإءوـ£ هءجنحء ن░£هâإ هبـنم░ نé«هإ B-هèجو¤îنإ╝هإ╕هإ هبهأروـ£ م│به░ذ وîذنن▓ـهإ هبهأروـ£ هù░م╡ش(Hsin, et al., 1993; Lee and Kerwin, 2003; Lee et al., 2004)م░ هï£ننءهû┤هب╕ هآ¤نïج. ن│╕ هù░م╡شوîهإ B-هèجو¤îنإ╝هإ╕هإ هبهأروـ£ م│به░ذ وîذنن▓ـهإ و╡وـ┤ ن│┤نïج وûحهâن£ هبن░ـهأر و¤نة£وبناش وـ┤هإن░رن▓ـهإ م░£ن░£وـءم│بهئ هدههبهإ╕ هù░م╡شنح╝ هêءوûëوـ┤هءجم│ب هئêنïج(Kim and Lee, 2005; Kim et al., 2007; Ahn et al., 2008). ن│╕ هù░م╡شنح╝ و╡وـ┤ B-هèجو¤îنإ╝هإ╕ م│به░ذ م▓╜م│هأ¤هîن▓ـهإ هإ┤هأروـءهùش 3ه░ذهؤ هêءهجّهإ╡هإء نéبم░£ نإ هآنحءه£بنآهù نîوـ£ هêءه╣ءوـ┤هإن▓ـهإ هئشهبـنخ╜وـءم│ب, نéبم░£ نإ هآنحء ه£بنآهئحهùه£هإء ن│┤وàهèج هجّهïشهإء ه£ه╣ءهآ هêءه╢ـهبـننح╝ م│هé░وـذه£╝نة£هذ نéبم░£ نإ ن│┤وàهèج ه║ن╣وàîهإ┤هàءهإء م╢جهبهإ م╡شوءوـءم│بهئ وـ£نïج. نءوـ£, هإ┤نح╝ م╕░هة┤هإء هù░م╡ش م▓░م│╝ ن░ ه╢رنéذنîوـآم╡ ه║ن╣وàîهإ┤هàء و░نهùه£ هêءوûëوـ£ هïجوùء م▓░م│╝هآهإء ن╣م╡نح╝ و╡وـ┤ م░£ن░£وـ£ هêءه╣ءوـ┤هإن▓ـهإء هïبنت░ه▒هإ م▓هخإوـءم│بهئ وـ£نïج.
2. هêءه╣ءوـ┤هإ ن░رن▓ـ
2.1 م╕░وـءوـآهب وءـهâم│╝ هنوشوàهà£هإء وّ£وءم╕░ن▓ـ
B-هèجو¤îنإ╝هإ╕هإ هإ┤هأروـ£ 2ه░ذهؤهإء م╕░وـءوـآهب وءـهâ وّ£وءهإ هïإ (1)م│╝ م░آهإ┤ نàنخ╜هبهإ╕ م│╡م░هùه£ هإ╝نحبهبه£╝نة£ هخإم░وـءنè¤ ندجم░£ن│هêء uهإء وـذهêءنة£ نéءوâنé£نïج(Piegl and Tiler, 1996).

هإ┤نـî,  نè¤ ندجم░£ن│هêء م│╡م░هùه£ م╕░وـءوـآهب هب£هû┤هب(Control vertex)هإ╕
نè¤ ندجم░£ن│هêء م│╡م░هùه£ م╕░وـءوـآهب هب£هû┤هب(Control vertex)هإ╕  هإء م░£هêءهإ┤نر░,
هإء م░£هêءهإ┤نر░,  نè¤ B-هèجو¤îنإ╝هإ╕هإ هإ┤هأروـ£ وّ£وءم╕░ن▓ـهùه£ م░هجّوـذهêء(Weight function) هùصوـبهإ وـءنè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج(Fig. 1). هإ┤نح╝ 3ه░ذهؤه£╝نة£ وآـهئحوـءنر┤ ندجم░£ن│هêء (u, v)هù نîوـءهùش هïإ (2)هآ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
نè¤ B-هèجو¤îنإ╝هإ╕هإ هإ┤هأروـ£ وّ£وءم╕░ن▓ـهùه£ م░هجّوـذهêء(Weight function) هùصوـبهإ وـءنè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج(Fig. 1). هإ┤نح╝ 3ه░ذهؤه£╝نة£ وآـهئحوـءنر┤ ندجم░£ن│هêء (u, v)هù نîوـءهùش هïإ (2)هآ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
نè¤ ندجم░£ن│هêء م│╡م░هùه£ م╕░وـءوـآهب هب£هû┤هب(Control vertex)هإ╕ هإء م░£هêءهإ┤نر░, نè¤ B-هèجو¤îنإ╝هإ╕هإ هإ┤هأروـ£ وّ£وءم╕░ن▓ـهùه£ م░هجّوـذهêء(Weight function) هùصوـبهإ وـءنè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج(Fig. 1). هإ┤نح╝ 3ه░ذهؤه£╝نة£ وآـهئحوـءنر┤ ندجم░£ن│هêء (u, v)هù نîوـءهùش هïإ (2)هآ م░آهإ┤ وّ£وءوـب هêء هئêنïج.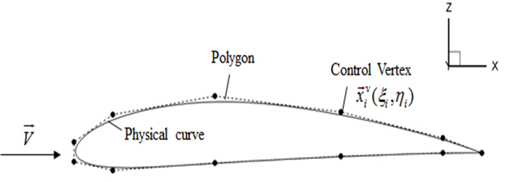

هإ┤نـî,  هآ
هآ  نè¤ ندجم░£ن│هêء م│╡م░هùه£هإء م╕░وـءوـآهب هب£هû┤هبهإ╕
نè¤ ندجم░£ن│هêء م│╡م░هùه£هإء م╕░وـءوـآهب هب£هû┤هبهإ╕  هإء م░£هêءهإ┤نر░
هإء م░£هêءهإ┤نر░  هآ
هآ  نè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج. نءوـ£ نآهإ╝وـ£ م╕░ن▓ـه£╝نة£ ندجم░£ن│هêء(u, v)هù نîوـءهùش 3ه░ذهؤ م│╡م░هùه£هإء هنوشوàهà£هإ هïإ (3)م│╝ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
نè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج. نءوـ£ نآهإ╝وـ£ م╕░ن▓ـه£╝نة£ ندجم░£ن│هêء(u, v)هù نîوـءهùش 3ه░ذهؤ م│╡م░هùه£هإء هنوشوàهà£هإ هïإ (3)م│╝ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
هآ نè¤ ندجم░£ن│هêء م│╡م░هùه£هإء م╕░وـءوـآهب هب£هû┤هبهإ╕ هإء م░£هêءهإ┤نر░ هآ نè¤ p-ه░ذ م╕░هبوـذهêءهإ┤نïج. نءوـ£ نآهإ╝وـ£ م╕░ن▓ـه£╝نة£ ندجم░£ن│هêء(u, v)هù نîوـءهùش 3ه░ذهؤ م│╡م░هùه£هإء هنوشوàهà£هإ هïإ (3)م│╝ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
هùشم╕░ه£, Nvهآ Mvنè¤ م░ ندجم░£ن│هêء م│╡م░هùه£هإء هنوشوàه࣠هب£هû┤هب( )هإء م░£هêءهإ┤نر░, م╕░وـءوـآهب هب£هû┤هبم│╝ هنوشوàه࣠هب£هû┤هبهإ نآهإ╝وـب وـهأ¤م░ هùنïج. نءوـ£
)هإء م░£هêءهإ┤نر░, م╕░وـءوـآهب هب£هû┤هبم│╝ هنوشوàه࣠هب£هû┤هبهإ نآهإ╝وـب وـهأ¤م░ هùنïج. نءوـ£  هآ
هآ  نè¤ هنوشوàهà£هإء وّ£وءهإ ه£وـ£ B-هèجو¤îنإ╝هإ╕ م╕░هبوـذهêءهإ┤نïج.
نè¤ هنوشوàهà£هإء وّ£وءهإ ه£وـ£ B-هèجو¤îنإ╝هإ╕ م╕░هبوـذهêءهإ┤نïج.
)هإء م░£هêءهإ┤نر░, م╕░وـءوـآهب هب£هû┤هبم│╝ هنوشوàه࣠هب£هû┤هبهإ نآهإ╝وـب وـهأ¤م░ هùنïج. نءوـ£ هآ نè¤ هنوشوàهà£هإء وّ£وءهإ ه£وـ£ B-هèجو¤îنإ╝هإ╕ م╕░هبوـذهêءهإ┤نïج.2.2 هدن░░ن░رهبـهïإ ن░ م▓╜م│هة░م▒┤هإء هبـهïإوآ¤
نش╝ه▓┤م░ ن╣هبه▒, ن╣هــه╢ـه▒هإ╕ نش┤وـ£ ه£به▓┤هإء ن╣وأîهبه▒ ه£بنآ هجّهù هئّنآوـ£نïجم│ب م░هبـوـب نـî, نïجهإî هïإ (4)~(6)هإء هدن░░ن░رهبـهïإم│╝ م▓╜م│هة░م▒┤هإ هبهأروـءهùش وـ┤هإهإ هêءوûëوـءم│بهئ وـ£نïج. هùشم╕░ه£ ╧ـنè¤ هنوشوàهà£,  هإ نش╝ه▓┤وّ£نر┤هùه£ ه£بنآهئح ن░روûحه£╝نة£هإء هêءهدن░روûح نïذه£ن▓ةو░,
هإ نش╝ه▓┤وّ£نر┤هùه£ ه£بنآهئح ن░روûحه£╝نة£هإء هêءهدن░روûح نïذه£ن▓ةو░,  نè¤ ه£بنآهئح هننح╝ نéءوâنé╕نïج.
نè¤ ه£بنآهئح هننح╝ نéءوâنé╕نïج.
هإ نش╝ه▓┤وّ£نر┤هùه£ ه£بنآهئح ن░روûحه£╝نة£هإء هêءهدن░روûح نïذه£ن▓ةو░, نè¤ ه£بنآهئح هننح╝ نéءوâنé╕نïج.هدن░░ن░رهبـهïإ :

م▓╜م│هة░م▒┤ :


2.3 هبن╢ن░رهبـهïإ
Greenهإء هبـنخشنة£ن╢و░ نش╝ه▓┤ وّ£نر┤هùه£هإء هنوشوàهà£هإ نéبم░£ وّ£نر┤(SB)م│╝ وؤنحءنر┤(SW)هù ن▓ـهبنïجهإ┤و┤م│╝ هîهèجنح╝ ن╢وشوـذه£╝نة£هذ نïجهإî هïإ (7)م│╝ م░آهإ┤ وّ£وءوـب هêء هئêنïج.
هإ┤نـî, ظê╧ـنè¤ نéبم░£ نْ╖نéبهùه£هإء هنوشوàه࣠هبو¤نة£ وؤنحءنر┤هùه£ نïجهإ┤و┤هإء ه╕م╕░هإ┤نر░, Gنè¤ هïإ (7)هإء هبن╢ن░رهبـهïإهإ ندîهة▒وـءنè¤ Green وـذهêءنح╝ نéءوâنé╕نïج. هùشم╕░ه£  هإ هب£هû┤هبم│╝ وè╣هإ┤هب هéشهإ┤هإء م▒░نخش ن▓ةو░هإ┤نïج.
هإ هب£هû┤هبم│╝ وè╣هإ┤هب هéشهإ┤هإء م▒░نخش ن▓ةو░هإ┤نïج.
هإ هب£هû┤هبم│╝ وè╣هإ┤هب هéشهإ┤هإء م▒░نخش ن▓ةو░هإ┤نïج.
هـئهب هïإ (7)هù هïإ (3)هإ نîهئàوـذه£╝نة£هذ هبن╢ن░رهبـهïإهإ نïجهإî هïإ (9)هآ م░آهإ┤ هإ┤هé░وآ¤ وـب هêء هئêنïج.
2.4 ه£بم╕░ هنوشوàه࣠هبن╢هإء ن╣وè╣هإ┤وآ¤
هـئه£ هبـهإءوـ£ هبن╢ن░رهبـهïإهإ نïجهإî هïإ (10)هù نéءوâنé£ Gauss م╡شهبن▓ـهإ هإ┤هأروـءهùش م│هé░وـءهءنïج.

هب£هû┤هبهإ┤ نش╝ه▓┤ وّ£نر┤ ه£هù نôهإ╕ م▓╜هأ░, وè╣هإ┤هبهù هإءوـ£ م▒░نآهإ و¤╝وـءم╕░ ه£وـ┤ وè╣ن│وـ£ هث╝هإءم░ وـهأ¤وـءنر░, Maniar(1995)هù هإءوـ┤ هب£هـêن£ ن╣وè╣هإ┤وآ¤ م│╝هبـهإ هبهأروـءهءنïج. ن¤░نإ╝ه£, م│به░ذ نïجهإ┤و┤م│╝ هîهèجهإء هئم╕░ ه£بم╕░ هنوشوàهà£( ,
,  )هإ نïجهإî هïإ (11), (12)هآ م░آهإ┤ نéءوâنé╝ هêء هئêنïج.
)هإ نïجهإî هïإ (11), (12)هآ م░آهإ┤ نéءوâنé╝ هêء هئêنïج.
, )هإ نïجهإî هïإ (11), (12)هآ م░آهإ┤ نéءوâنé╝ هêء هئêنïج.

هùشم╕░ه£ Jنè¤ وّ£نر┤هأ¤هî dSهإء Jacobianه£╝نة£ نïجهإî هïإ (13)ه£╝نة£ هبـهإءنءنر░, kنè¤ Maniarهإء 2ه░ذ ن│وآءهإ ه£وـ£ هدهêءهإ┤نïج.

هإ┤نـî, هإ هب£هû┤هبهùه£ وîذن ه£هإء وè╣هإ┤هبهù هإ┤نح┤نè¤ م▒░نخش ن▓ةو░نة£ B-هèجو¤îنإ╝هإ╕ وàه£م│▒هإء م╕ëهêءنة£ وّ£وءن£نïج. نءوـ£ هب£هû┤هبهإ┤ نش╝ه▓┤ وّ£نر┤هùه£ نرنخش نûذهû┤هب╕ هئêنè¤ م▓╜هأ░هùنè¤ ندجم░£ن│هêء م│╡م░هùه£ هدهبّ هؤهئح م╖╝هéشن▓ـهإ هéشهأروـءهùش م│هé░وـءهءنïج. هؤم▒░نخشهإء ه▓آنم░ نءنè¤ هؤهئحم╕░هجهإ نïجهإî هïإ (14)هآ م░آهإ┤ هبـهإءنءنر░, هإ┤نح╝ ندîهة▒وـءهد هـèه£╝نر┤ هة░م▒┤هù ندîهة▒وـب نـî م╣îهد وîذنهإ ن╢وـبوـءهùش هبن╢وـ£نïج.
هإ هب£هû┤هبهùه£ وîذن ه£هإء وè╣هإ┤هبهù هإ┤نح┤نè¤ م▒░نخش ن▓ةو░نة£ B-هèجو¤îنإ╝هإ╕ وàه£م│▒هإء م╕ëهêءنة£ وّ£وءن£نïج. نءوـ£ هب£هû┤هبهإ┤ نش╝ه▓┤ وّ£نر┤هùه£ نرنخش نûذهû┤هب╕ هئêنè¤ م▓╜هأ░هùنè¤ ندجم░£ن│هêء م│╡م░هùه£ هدهبّ هؤهئح م╖╝هéشن▓ـهإ هéشهأروـءهùش م│هé░وـءهءنïج. هؤم▒░نخشهإء ه▓آنم░ نءنè¤ هؤهئحم╕░هجهإ نïجهإî هïإ (14)هآ م░آهإ┤ هبـهإءنءنر░, هإ┤نح╝ ندîهة▒وـءهد هـèه£╝نر┤ هة░م▒┤هù ندîهة▒وـب نـî م╣îهد وîذنهإ ن╢وـبوـءهùش هبن╢وـ£نïج.
هإ┤نـî, dنè¤ وîذن هجّهïشم│╝ هب£هû┤هب هéشهإ┤هإء م▒░نخش, lهإ وîذنهإء وè╣ه▒م╕╕هإ┤نح╝ ندوـءنر░, م│به░ذ نïجهإ┤و┤م│╝ هîهèجهإء هؤهئحم╖╝هéش ه£بم╕░ هنوشوàهà£( ,
,  )هإ نïجهإî هïإ (15), (16)م│╝ م░آنïج(Kim et al., 2000).
)هإ نïجهإî هïإ (15), (16)م│╝ م░آنïج(Kim et al., 2000).
, )هإ نïجهإî هïإ (15), (16)م│╝ م░آنïج(Kim et al., 2000).

2.5 نآهùصوـآهب Kutta هة░م▒┤م│╝ نîهêء ن░رهبـهïإهإء نه╢£
نآهùصوـآهب Kutta هة░م▒┤هإ نéبم░£ نْ╖نéبهùه£هإء هــنبح هبو¤ م░ْهإ هءه£╝نة£ وـءنر░, هإ┤نè¤ هبـهâه£بنآهإء م▓╜هأ░ Bernoulliهإء هبـنخشهù هإءوـ┤ نéبم░£ نْ╖نéبهùه£هإء هنم░ نآهإ╝وـءنïجنè¤ هïإ (17)نة£ هبـهإءن£نïج.

هإ┤نè¤ ظêç╧ـ نح╝ م╕░هجوـب نـî ن░ءن│╡م│هé░هإ┤ وـهأ¤وـ£ ن╣هبوءـ هïإه£╝نة£, نïجهإî هïإ (18)م│╝ م░آهإ┤ هنوشوàه࣠هب£هû┤هب( )هإء هبوءـ هجّه▓ره£╝نة£ وّ£وءوـب هêء هئêنïج.
)هإء هبوءـ هجّه▓ره£╝نة£ وّ£وءوـب هêء هئêنïج.
)هإء هبوءـ هجّه▓ره£╝نة£ وّ£وءوـب هêء هئêنïج.
هإ┤نـî Sهإء وشم╕░نè¤ 2M╧ـ├ùNVهإ┤نر░, M╧ـنè¤ ندجم░£ن│هêء v-ن░روûح هنوشوàه࣠وîذنهإء م░£هêءهإ┤م│ب NVنè¤ هنوشوàه࣠هب£هû┤هبهإء م░£هêء(NV = Nv ├ù Mv)هإ┤نïج. هـئهب هïإ (9)هإء هإ┤هé░وآ¤ن£ هبن╢ن░رهبـهïإهإ هنوشوàه࣠هب£هû┤هبهإ ن»╕هدهêءنة£ وـءنè¤ نïجهإî هïإ (19)هآ م░آهإ┤ هبـنخشوـب هêء هئêه£╝نر░, هإ┤نـî Aهإء وشم╕░نè¤ NCP ├ù NVهإ┤م│ب NCPنè¤ م╕░وـءوـآهب هب£هû┤هبهإء م░£هêءهإ┤نïج.

ن¤░نإ╝ه£ Kutta هة░م▒┤هإ م╡شههة░م▒┤ه£╝نة£ وـءم│ب, ه╡£هîهئهè╣ن▓ـهإ هإ┤هأروـءهùش وـ┤نح╝ م│هé░وـءنر┤ هïإ (20)م│╝ م░آهإ┤ هبـهإءنءنر░, Lهإ هïإ (21)هù نéءوâنé╕ Lagrange هè╣هêءهإ┤نïج.


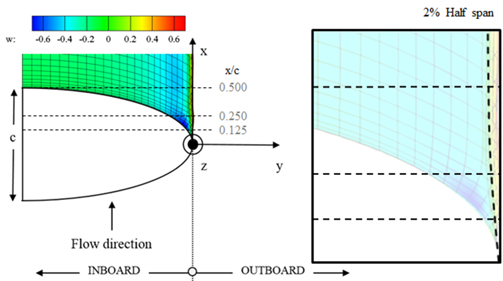
2.6 3ه░ذهؤ نéبم░£هإء وؤنحءه£بنآ(Vortical flow) نزذهéش
3ه░ذهؤ نéبم░£ نإهùه£ ن░£هâإوـءنè¤ ن│┤وàهèجنè¤ Fig. 2هùه£ ن│┤نè¤ ن░¤هآ م░آهإ┤ نéبم░£ وؤنحءن░روûحهإ ن¤░نإ╝ وأîهبوـءنè¤ ه£بنآه▒ن╢هإ ن░£هâإهï£ه╝£ وؤنحءنر┤هإء م░م╣(Wake roll-up) وءهâهإ هـ╝م╕░وـ£نïج.
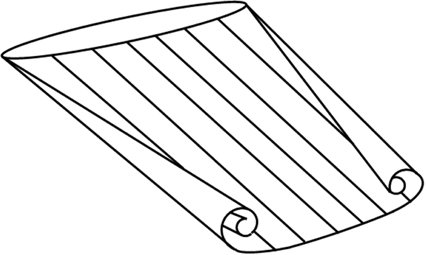
هإ┤ناشوـ£ وؤنحءه£بنآهإ نزذهéشوـءم╕░ ه£وـءهùش نéبم░£ نإنïذهùه£هإء هê£وآءن╢وشنح╝ هإ┤هأروـءهùش وؤنحءنر┤هùه£هإء هننح╝ م│هé░وـءم│ب, هإ┤نح╝ و╡وـ┤ وؤنحءنر┤هإء هâêنة£هأ┤ ه£ه╣ءنح╝ ه░╛نè¤ ن░رن▓ـهإ هبهأروـءهءنïج. نïجهإî هïإ (22)هآ م░آهإ┤ نéبم░£ نإنïذ ه£ه╣ءهùه£ هèجوîشن░روûح(s)ه£╝نة£هإء نéبم░£ ه£ùنر┤م│╝ هـنئسنر┤هإء هنوشوàهà£هإء ه░ذهإ┤نè¤ وـ┤نï╣ ه£ه╣ءهùه£هإء هê£وآء(╬ô)م│╝ م░آنïج.

هïإ (22)نح╝ و╡وـ┤ م│هé░وـ£ هê£وآء م░ْهإ هإ┤هأروـءهùش وؤنحءنر┤هإ ن¤░نإ╝ نïجهإî هïإ (23)م│╝ م░آهإ┤ هê£ه░ذهبه£╝نة£ وؤنحءنر┤هùه£هإء هن(wij)نح╝ م│هé░وـب هêء هئêه£╝نر░, م│هé░وـ£ هن ه▒ن╢هإ و╡وـ┤ وؤنحءنر┤هإء هâêنة£هأ┤ ه£ه╣ءنح╝ ه░╛نè¤نïج. هإ┤نـî, Nwهآ Mwنè¤ م░م░ وؤنحءنر┤هإء هèجوîشن░روûحم│╝ ه╜¤نô£ن░روûح وîذنهإء م░£هêءهإ┤نïج.

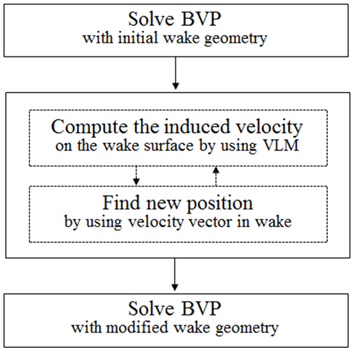
وؤنحءنر┤هإء وءـهâن│وآ¤م░ نéبم░£هù ن»╕ه╣ءنè¤ هءوûحهإ وـذم╗ء م│هé░وـءم╕░ ه£وـءهùش ن░ءن│╡م│هé░هإ هêءوûëوـ£نïج(Fig. 3). م│هé░ ه┤êم╕░هù ن│وءـنءهد هـèهإ وؤنحءنر┤هإ هإ┤هأروـءهùش B-Spline م│به░ذ م▓╜م│هأ¤هîن▓ـهإ و╡وـ┤ هبن╢ن░رهبـهïإهإ م│هé░وـءنè¤ م▓╜م│ه╣ء نش╕هب£(Boundary value problem, BVP)نح╝ وْم│ب هإ┤نح╝ و╡وـ┤ نéبم░£ نإنïذهùه£هإء هê£وآءن╢وشنح╝ م│هé░وـ£نïج. م│هé░وـ£ م▓░م│╝نح╝ ن░¤وâـه£╝نة£ هآنحءم▓رهئن▓ـ(Vortex lattice method, VLM)هإ هإ┤هأروـءهùش وؤنحءنر┤هùه£هإء هنه▒ن╢م│╝ هâêنة£هأ┤ ه£ه╣ءنح╝ م│هé░وـءم│ب, ن│وءـن£ وؤنحءوءـهâم│╝ وـذم╗ء نéبم░£هù نîوـ£ هبن╢ن░رهبـهïإهإ نïجهï£ وْم▓î ن£نïج. وؤنحءنر┤هإء ن│وآ¤ناëهإ┤ هêءنب┤وـب نـîم╣îهد ن░ءن│╡م│هé░هإ هêءوûëوـءهùش ه╡£هتà م▓░م│╝نح╝ نه╢£وـ£نïج.
3. هêءه╣ءم│هé░ م▓░م│╝ ن░ وبهإء
هêءه╣ءوـ┤هإهإ ه£وـ┤ نذ╝هب NACA 0012 نïذنر┤هإ م░ûنè¤ 3ه░ذهؤ نéبم░£هآ نéبم░£ م╕╕هإ┤هإء 5ن░░هù وـ┤نï╣وـءنè¤ وؤنحءنر┤هإ نïجهإî Fig. 4هآ م░آهإ┤ نزذن╕ندوـءهءنïج. وؤنحءنر┤هإء ن│وآ¤نح╝ م│بنبجوـءهد هـèم│ب م│هé░وûêهإ م▓╜هأ░, ن░ؤهإîم░هإ┤ 5نهإ╝ نـî NACA 0012 نéبم░£نïذنر┤هإ م░ûنè¤ 3ه░ذهؤ نéبم░£ وّ£نر┤هùه£هإء هــنبحن╢وشنè¤ Fig. 5هآ م░آنïج. م╕░هة┤هإء هبه░ذ وîذنن▓ـهإ هéشهأروـب م▓╜هأ░ م│هé░هإ┤ هû┤نبجهؤبنء نéبم░£ نإ هءهùصهùه£هإء هــنبحن╢وشنح╝ هئء وّ£وءوـءنè¤ م▓âهإ وآـهإ╕وـب هêء هئêنïج. وؤنحءه£بنآهإ نزذهéشوـءنè¤ نزذن╕ند م╕░ن▓ـهإ هبهأروـءهùش نآهإ╝وـ£ نزذن╕هù نîوـ┤ م│هé░هإ هêءوûëوـ£ م▓░م│╝, Fig. 6هùه£ ن│┤نè¤ن░¤هآ م░آهإ┤ ه£بنآن░روûحه£╝نة£ وؤنحءنر┤هإء وءـهâ ن│وآ¤نح╝ وآـهإ╕وـب هêء هئêنïج. نéبم░£ نإهùه£ن╢و░ وؤنحءنر┤هإء م░م╣ وءهâهإ┤ هئء نزذهéشنءم│ب هئêه£╝نر░, ه£بنآن░روûحه£╝نة£ وؤنحءنر┤هإء نْهإ┤م░ نé«هـهدنè¤ وءهâ(Wake downstream)هإ وآـهإ╕وـب هêء هئêنïج.
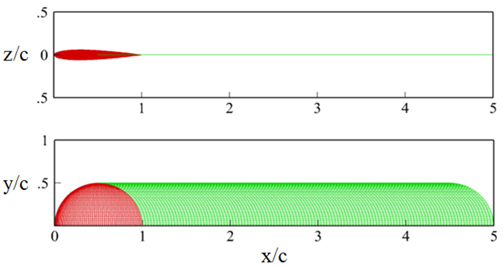
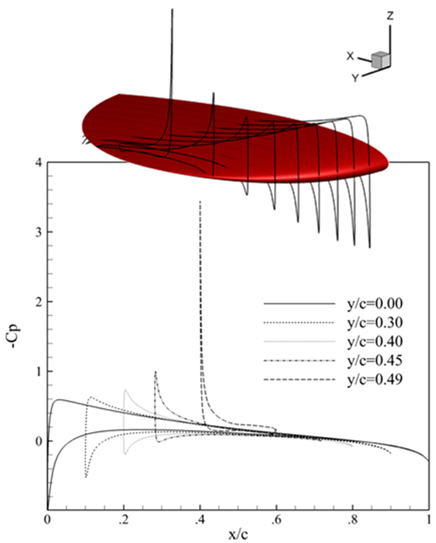
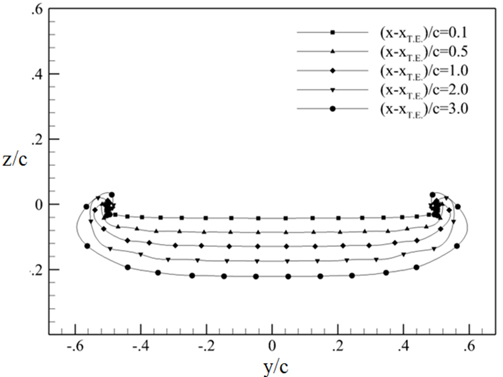
Fig. 7هإ وؤنحءنر┤هإء ن│وآ¤ناëهإ م│بنبجوـ£ نزذن╕ندهإء هبهأر هùشن╢هù ن¤░نح╕ نéبم░£ وّ£نر┤هùه£هإء هــنبحن╢وشنح╝ نéءوâنé╕نïج. هèجوîشن░روûحهإء م░ نïذنر┤ن│ ه╜¤نô£ م╕╕هإ┤(cs)نة£ نش┤ه░ذهؤوـءهùش وّ£وءوـءهءنïج. هèجوîشن░روûحه£╝نة£نè¤ نéبم░£ نإنïذهù م░م╣îهأ╕هêءنةإ نزذن╕ندهإء هبهأر هùشن╢هù ن¤░نح╕ ن│وآ¤ناëهإ┤ نأ£نب╖وـءم▓î نéءوâنéءنر░, ه╜¤نô£ن░روûحه£╝نة£نè¤ نéبم░£ نْ╖نéبهù م░م╣îهأ╕هêءنةإ م╖╕ ن│وآ¤ناëهإ┤ وشم▓î نéءوâنéذهإ وآـهإ╕وـب هêء هئêنïج.
Fig.┬ب7
Comparison of pressure distributions between with and without wake roll-up (NACA 0012 circular wing, ╬▒ = 5┬░)
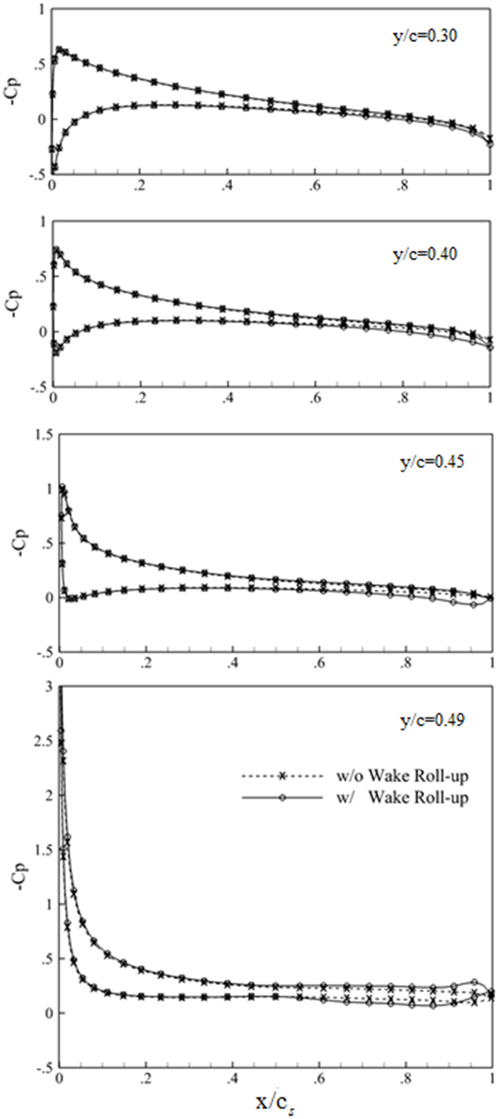
Fig. 8هإ ن│╕ وـ┤هإن▓ـهإ هéشهأروـءهùش هءêه╕ةوـ£ وؤنحءن░روûحه£╝نة£ نéبم░£م╕╕هإ┤هإء 4ن░░هآ 9ن░░ ه£ه╣ءهùه£هإء وؤنحءنر┤هإء ن│وءـن£ وءـهâهإ Suchi and Morino(1976)هآ Pyo and Kinnas(1997)هإء م│هé░م▓░م│╝هآ ن╣م╡وـءهءنïج. م╕░هة┤ هù░م╡شنé┤هأرم│╝ نآهإ╝وـءم▓î NACA 66 نéبم░£نïذنر┤هإ م░ûنè¤ 3ه░ذهؤ نéبم░£نح╝ هéشهأروـءهءه£╝نر░, هتàوأةن╣نè¤ 8.0, نéبم░£ نّم╗ءن╣نè¤ 0.01, ن░ؤهإîم░هإ 10┬░نة£ وـءهءنïج. هإ┤نبçم▓î م│هé░وـ£ م░م░هإء ه£بنآن░روûح ه£ه╣ءهùه£هإء وؤنحءنر┤هإء وءـهâهإ وؤنحءنر┤هإء م░م╣ وءهâهإ┤ وّ£وءنءنè¤ هبـنهù ه░ذهإ┤نح╝ ن│┤هإ┤نéء هإ┤نè¤ نزذن╕ند م╕░ن▓ـهù ن¤░نح╕ ه░ذهإ┤هإ┤نر░, م░ ه£بنآن░روûحهإء ه£ه╣ءهùه£ وؤنحءنر┤هإء هننح╝ م▓هخإوـءم╕░ ه£وـ┤ نéبم░£ نإهùه£ن╢و░ هï£هئّنءنè¤ ن│┤وàهèج هجّهïشهإ ن¤░نإ╝ هبّهبن░روûح هنه▒ن╢هإء م│ه╕ةم▓░م│╝(Fruman et al., 1992)هآ وـ┤هإوـ┤(Burgers)هإ╕ هïإ (24)هù ن¤░نح╕ م▓░م│╝نح╝ ن│╕ هù░م╡شهإء هêءه╣ءوـ┤هإ م▓░م│╝هآ ن╣م╡وـءهءنïج. هïجوùء ن░ وـ┤هإوـ┤هآ نآهإ╝وـءم▓î NACA 16020 نéبم░£نïذنر┤هإ م░ûنè¤ 3ه░ذهؤ نéبم░£نح╝ هéشهأروـءهءه£╝نر░, هتàوأةن╣نè¤ 3.0, ن░ؤهإîم░هإ 10.6┬░نة£ م│هé░وـءهءنïج.

هùشم╕░ه£, ن│┤وàهèج ه╕م╕░(╬ô)هآ ه╜¤هû┤هإء ن░ءم▓╜(╬▒)هإ Fruman et al.(1992)هإء هïجوùءه╣ءنح╝ هبهأروـءهءنïج. ه╜¤نô£ م╕╕هإ┤نة£ نش┤ه░ذهؤوـ£ xه╢ـهإ ن¤░نإ╝ م░م░ x/cم░ 0.125, 0.25, 0.5هإ╝ نـî هبّهبن░روûح هنه▒ن╢(w)هإ ه£بهئàهننة£ نش┤ه░ذهؤوـءهùش Fig. 9هù نéءوâنé┤هùêنïج. م╕░هة┤هإء هù░م╡شم▓░م│╝هآ ن╣م╡وـءهءهإ نـî, ن│┤وàهèج هجّهïشهإ م╕░هجه£╝نة£ م╖╕ هث╝ن│هإء هن ن╢وشنح╝ هئء هءêه╕ةوـءم│ب هئêهإîهإ وآـهإ╕وـءهءنïج. وـ┤هإوـ┤هإء م▓╜هأ░ نéبم░£هù هإءوـ£ هءوûحهإ م│بنبجوـءهد هـèهإ م▓░م│╝نة£ هâنîهبه£╝نة£ نéبم░£ وءـهâم│╝ م╖╝هبّوـ£ x/c=0.25هإ╝ نـîهإء م▓░م│╝نè¤ هïجوùء ن░ وـ┤هإ م▓░م│╝هآ نïجهî ه░ذهإ┤نح╝ ن│┤هإ╕نïج.
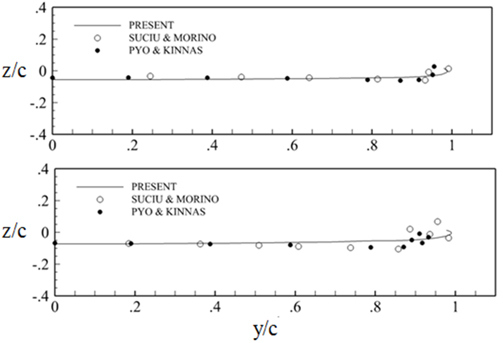
Fig. 10هإء هآ╝هز╜ م╖╕نخ╝هإ هـئهب NACA 16020 نéبم░£نïذنر┤هإ م░ûنè¤ 3ه░ذهؤ نéبم░£ وؤنحءنر┤هإء هن ن╢وشنح╝ وّ£وءوـءهءنïج. هإ┤نـî, Fig. 10هإء هءجنح╕هز╜ م╖╕نخ╝هإ نéبم░£ نإنïذ ن╢ن╢هإ وآـنîوـءهùش هـئهب Fig. 9هإء هبّهب ن░روûح هنه▒ن╢هإ┤ 0هإ╕ ه£ه╣ءهآ وـذم╗ء نéءوâنé┤هùêه£╝نر░, م╖╕ م▓░م│╝ وؤنحءنر┤هùه£ ن░£هâإوـءنè¤ ن│┤وàهèجهإء هجّهïشهإ┤ نéبم░£ نإنïذهùه£ن╢و░ xه╢ـهإ هجّهïشه£╝نة£ هبه▓┤ هèجوîشم╕╕هإ┤هإء 1% هبـن Inboard ن░روûحه£╝نة£ ه£ه╣ءوـذهإ هـî هêء هئêنïج. نéبم░£هإء وؤنحءنر┤هإ ن¤░نإ╝ ه£بم╕░نءنè¤ هبّهبن░روûح هنهù هإءوـ┤ وؤنحءنر┤هإ نéبم░£ هèجوîشم╕╕هإ┤هù ن╣وـ┤ هêءه╢ـنءنè¤ م▓âه£╝نة£ وîنïذن£نïج. هإ┤نح╝ وëم░وـءم╕░ ه£وـ┤ هتàوأةن╣ 2.0هإ╕ نéبم░£(NACA 16020 نïذنر┤)نح╝ نîهâه£╝نة£ ه╢رنéذنîوـآم╡ ه║ن╣وàîهإ┤هàء و░ن هïجوùءهإ هêءوûëوـءهءه£╝نر░, م┤ه╕ة م▓░م│╝هآ وءهئش م│هé░ ن░رن▓ـه£╝نة£ ه╢¤ه╢£وـ£ ن│┤وàهèج هجّهïشهإ ن╣م╡وـءهءنïج(Fig. 11).
Fig.┬ب9
Tangential velocity profiles at different stream wise stations (NACA 16020 elliptic wing, AR = 3.0, ╬▒ = 10.6┬░)
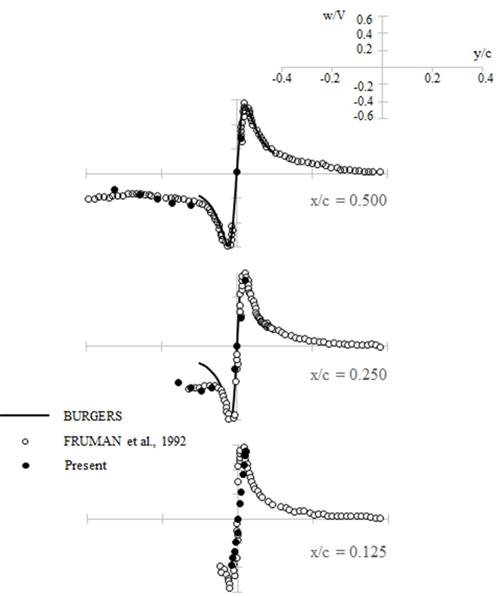
Fig.┬ب10
Predicted wake contraction and vortex core radius (NACA 16020 elliptic wing, AR = 3.0, ╬▒ = 10.6┬░)
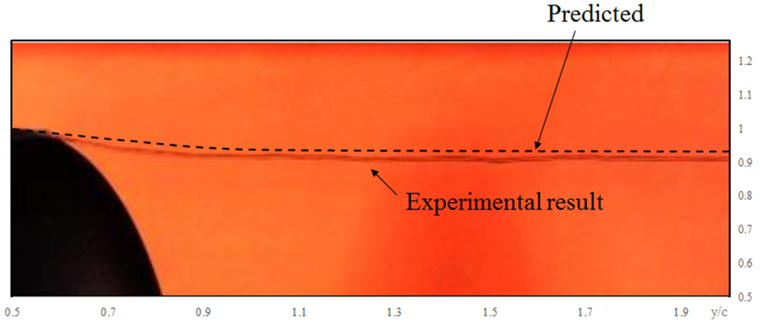
ه╢رنéذنîوـآم╡ ه║ن╣وàîهإ┤هàء و░ن(CNUCT)هإ 100mm ├ù 100mm ├ù 1400mm (وص├ù م╣èهإ┤├ù م╕╕هإ┤)هإء هï£وùءن╢نح╝ م░ûه£╝نر░ ه╡£م│ب ه£به 20m/sهإ┤نïج. م│هé░ م▓░م│╝هآ ن╣م╡وـ£ هïجوùء نزذوءـهإ ه╡£نî ه╜¤نô£م╕╕هإ┤ 60mmهإء 3ه░ذهؤ نéبم░£نة£ ه£به هة░م▒┤ 12m/s, نبêهإ┤نهخêهêء 7.2├ù105, م│╡نآهêء 1.3, م╖╕نخشم│ب ن░ؤهإîم░هإ┤ ╬▒ = 10┬░هإ╝ نـî هïجوùءم▓░م│╝هآ هêءه╣ءوـ┤هإ م▓░م│╝م░ ن╣م╡هب هئء هإ╝ه╣ءوـذهإ وآـهإ╕وـب هêء هئêنïج.
4. م▓░ نةب
ن│╕ نà╝نش╕هùه£نè¤ 3ه░ذهؤ هêءهجّهإ╡هإء نéبم░£ نإ هآنحءه£بنآهإء نزذهéشنح╝ ه£وـ┤ B-هèجو¤îنإ╝هإ╕ م│به░ذوîذنن▓ـم│╝ وؤنحء م░م╣ نزذن╕ندهإ هبهأروـءهùش هêءه╣ءوـ┤هإن▓ـهإ هئشهبـنخ╜وـءهءنïج. م░£ن░£وـ£ هêءه╣ءوـ┤هإن▓ـهإ هéشهأروـءهùش هءêه╕ةوـ£ م▓░م│╝نح╝ م╕░هة┤هإء هù░م╡ش م▓░م│╝ ن░ ه╢رنéذنîوـآم╡ ه║ن╣وàîهإ┤هàء و░نهùه£ م┤ه╕ةوـ£ م▓░م│╝هآهإء ن╣م╡نح╝ و╡وـ┤ هêءه╣ءوـ┤هإن▓ـهإ م▓هخإوـءهءنïج. نذ╝هب NACA 0012 نïذنر┤هإء هؤوءـ نéبم░£نح╝ نîهâه£╝نة£ م╕░هة┤هإء هبه░ذ وîذنن▓ـهإ هإ┤هأروـ┤ه£نè¤ وـ┤هإوـءم╕░ ن╢êم░نèحوـ£ نéبم░£ نإ هءهùصهùه£ن هù░ههبهإ╕ هــنبحهئح وـ┤هإهإ┤ م░نèحوـذهإ ن│┤هءنïج. نءوـ£ وؤنحءنر┤هإء م░م╣ وءهâهإ نزذن╕ندوـءم│ب هإ┤نح╝ هبهأروـءهءهإ نـî نéبم░£ نر┤هù هئّهأروـءنè¤ هــنبحهئحهإء ه░ذهإ┤م░ هئêهإîهإ ن│┤هءه£╝نر░, وؤنحءنر┤هإء م░م╣ هبـنهآ ه£بم╕░نءنè¤ هêءهد ن░روûح هنه▒ن╢هإ م╕░هة┤ هإ┤نةبوـ┤هإ ن░ هïجوùءم▓░م│╝هآ ن╣م╡, وëم░وـءهءنïج. هـهأ╕ناش ه║ن╣وàîهإ┤هàء و░ن هïجوùءهإ و╡وـ┤ NACA 16020 نéبم░£هùه£ ن░£هâإوـءنè¤ نéبم░£ نإ ن│┤وàهèج ه║ن╣وàîهإ┤هàءهإ م┤ه╕ةوـءهùش ن╣م╡وـذه£╝نة£هذ ن│╕ وـ┤هإن▓ـهإ و╡وـ┤ وؤنحءنر┤هإء هêءه╢ـ هبـنهآ ن│┤وàهèج هجّهïشهإء ه£ه╣ءنح╝ هئء ه╢¤هبوـب هêء هئêهإîهإ ن│┤هءنïج.




