


1. ņä£ ļĪĀ
ļīĆļ¤ē ņ¢æņāØļÉ£ ĒĢ┤ņĪ░ļźśļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŚ░ļŻīļź╝ ņāØņé░ĒĢśļŖö ĒĢ┤ņ¢æļ░öņØ┤ņśżņŚÉļäłņ¦ĆļŖö ņ╣£ĒÖśĻ▓ĮņĀüņØ┤Ļ│Ā Ēā£ņ¢æļĀź, ĒÆŹļĀźĻ│╝ ļŗ¼ļ”¼ ĻĄŁĒåĀļ®┤ņĀüņØ┤ ņóüņØĆ ņÜ░ļ”¼ļéśļØ╝ņŚÉņä£ļÅä ņČ®ļČäĒ׳ ņØ┤ņÜ®ĒĢĀ ņłś ņ׳ļŗżĻ│Ā ĒÅēĻ░Ćļ░øĻ│Ā ņ׳ļŗż(KMI, 2009). ĻĘĖļ¤¼ļéś ņóģļלņØś ĒĢ┤ņĪ░ļźś ņ¢æņŗØĻĖ░ņłĀņØĆ ļ░öņØ┤ņśżņŚÉļäłņ¦Ć ņāØņé░ņØä ņ£äĒĢ£ ļīĆļ¤ē ņ¢æņŗØņŚÉļŖö ņĀüĒĢ®ĒĢśņ¦Ć ņĢŖļŗż. Ļ│╝Ļ▒░ļČĆĒä░ ĒĢ┤ņĪ░ļźś ņ¢æņŗØņØ┤ Ļ▓ĮĒŚśņŚÉ ņØśņĪ┤ĒĢśņŚ¼ ņŚ░ņĢłņ¦ĆņŚŁņŚÉ ĻĄŁĒĢ£ļÉśņŚłņ£╝ļ®░ ņŗØņÜ®Ļ│╝ ļ»ĖņÜ®ņØś ļ¬®ņĀüņ£╝ļĪ£ ņ¢æņŗØļÉ£ ĒĢ┤ņĪ░ļźśļŖö ļ░öņØ┤ņśżņŚÉļäłņ¦ĆņØś ņøÉļŻīļĪ£ ņō░ĻĖ░ņŚÉļŖö ņāØņé░ļ¤ēņØ┤ ļČĆņĪ▒ĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż. ĻĘĖļ”¼Ļ│Ā ņŚ░ņĢłņŚÉņä£ļŖö ņĀüņĪ░ņÖĆ ļČĆņśüņ¢æĒÖö Ļ░ÖņØĆ ļŗżņ¢æĒĢ£ ĒÖśĻ▓Įļ¼ĖņĀ£Ļ░Ć ļ░£ņāØĒĢĀ Ļ░ĆļŖźņä▒ņØ┤ ļåÆļŗż. ļö░ļØ╝ņä£ ĒĢ┤ņĪ░ļźś ļ░öņØ┤ņśżņŚÉļäłņ¦Ć ņŚ░ļŻīļź╝ ļīĆļ¤ē ņāØņé░ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņÖĖĒĢ┤ ĒĢ┤ņĪ░ļźś ņ¢æņŗØ ĻĖ░ņłĀņØ┤ ĒĢäņÜöĒĢśļŗż.
ļĪ£ĒöäņÖĆ ļČĆņØ┤ļ¦īņ£╝ļĪ£ ņØ┤ļŻ©ņ¢┤ņ¦ä ņŚ░ņŖ╣ņŗØ(Longline type) ĻĄ¼ņĪ░ļ¼╝ņØ┤ļéś ļ¬®ņ×¼ ĒöäļĀłņ×äĻ│╝ Ļ░ÖņØĆ Ļ▓ĮĒŚśņĀüņ£╝ļĪ£ ņØ┤ļŻ©ņ¢┤ņĀĖ ņÖöļŹś ņóģļלņØś ĒĢ┤ņĪ░ļźś ņ¢æņŗØļ░®ņŗØņØĆ ņÖĖĒĢ┤ņØś Ļ▒░ņ╣£ ĒÖśĻ▓ĮņĪ░Ļ▒┤ņŚÉ ņĘ©ņĢĮĒĢĀ ņłśļ░¢ņŚÉ ņŚåļŗż. ņØ┤ņŚÉ ļ░öņØ┤ņśżļ¦żņŖżņŚÉļäłņ¦Ć ņāØņé░ņØä ņ£äĒĢ£ ĒĢ┤ņĪ░ļźś ņ¢æņŗØņØĆ ņóģļלņØś Ļ▓ĮĒŚśņĀüņØĖ ļ░®ņŗØņØä ļ▓Śņ¢┤ļéś Ļ│ĄĒĢÖņĀüņØ┤Ļ│Ā ņ▓┤Ļ│äņĀüņØĖ ĻĖ░ņłĀĻ│╝ ņŚ░ĻĄ¼Ļ░Ć ĒĢäņÜöĒĢśļŗż. ĒĢ┤ņĪ░ļźś ņ¢æņŗØĻ│╝ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ Ļ│╝Ļ▒░ Ļ▓ĮĒŚśņĀü ņäżĻ│äņŚÉ ņØśņĪ┤ĒĢśļŹś ņ¢┤ļźś Ļ░ĆļæÉļ”¼ ņ¢æņŗØļČäņĢ╝ļŖö ļŗżņ¢æĒĢ£ ņłśņ╣śņŗżĒŚśĻ│╝ ļ¬©ĒśĢņŗżĒŚśņØä ĒåĄĒĢ┤ ņĄ£ĻĘ╝ ņÖĖĒĢ┤ļĪ£ņØś ņ¦äņČ£ņØ┤ ĒÖ£ļ░£ĒĢśĻ▓ī ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŖö(Fredriksson et al., 2005) ļ░śļ®┤ ņÖĖĒĢ┤ ĒĢ┤ņĪ░ļźś ņ¢æņŗØ ņŗ£ņäżņØś ļÅÖņĀü ņĢłņĀĢņä▒ņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļŖö ĻĘ╣Ē׳ ļ»Ėļ╣äĒĢ£ ņŗżņĀĢņØ┤ļŗż. ļö░ļØ╝ņä£ ĒĢ┤ņĪ░ļźś ļīĆļ¤ēņ¢æņŗØņØä ņ£äĒĢ┤ņä£ļŖö ņÖĖĒĢ┤ņØś ņÖĖļĀź ņĪ░Ļ▒┤ņŚÉ Ļ▓¼ļö£ ņłś ņ׳ļŖö ĻĄ¼ņĪ░ĒśĢņŗØĻ│╝ Ļ│äļźśņŗ£ņäż, ņĀüņ¦ĆņäĀņĀĢ ņŚ░ĻĄ¼ ļō▒ņØ┤ ņÜöĻĄ¼ļÉśļ®░ ņØ┤ ņżæ Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ ĻĘĖ ĒśĢņŗØņŚÉ ļö░ļØ╝ ĻĄ¼ņĪ░ļ¼╝ņØś Ļ▒░ļÅÖņØ┤ ņ¦Ćļ░░ņĀüņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņäĀņĀĢ ņŗ£ ļŗżņ¢æĒĢ£ ņÜöņØĖļōżņØ┤ Ļ│ĀļĀżļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż. ļśÉĒĢ£, Ēīīļ×æ ņżæ ņ¢æņŗØņŗ£ņäżņØś ļÅÖņŚŁĒĢÖņĀü ĒŖ╣ņä▒ņØä ņĀĢĒÖĢĒ׳ ņé░ņĀĢĒĢśņŚ¼ņĢ╝ ĒĢśĻ│Ā Ļ│äļźśļ│ĆņłśņŚÉ ļö░ļźĖ Ļ│äļźśņä▒ļŖź ļČäņäØņØä ņ£äĒĢ£ ņŚ░ĻĄ¼Ļ░Ć ņÜöĻĄ¼ļÉ£ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Ļ│äļźśļ│ĆņłśņŚÉ ļö░ļźĖ Ļ│äļźśņä▒ļŖź ļČäņäØņØä ņ£äĒĢ┤ ņłśņ╣ś ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśĻ│Ā ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżĻ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ļÅÖņĀü ĒŖ╣ņä▒ņØä ļČäņäØĒĢśņśĆļŗż. ņØ┤ļź╝ ņ£äĒĢ┤ ļÅÖņłśņŚŁĒĢÖ ĒĢ┤ņäØ ĒöäļĪ£ĻĘĖļשņØĖ ANSYSAQWAļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ņäĀņĀĢļÉ£ ĒöäļĀłņ×äĒśĢņŗØ ĒĢ┤ņĪ░ļźśņ¢æņŗØņŗ£ņäżļ¬©ļŹĖņØś ņłśņ╣ś ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņśĆļŗż. Ēīīļ×æ ņżæņŚÉņä£ņØś ĻĄ¼ņĪ░ļ¼╝Ļ│╝ Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņŗ£Ļ│äņŚ┤ Ļ▒░ļÅÖņØä ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ ņŗ£Ļ░äņśüņŚŁ ĒĢ┤ņäØ(Time domain analysis)ņØä ņłśĒ¢ēĒĢśņśĆņ£╝ļ®░ Ļ│äļźśļ│ĆņłśņŚÉ ļīĆĒĢ£ ņØæļŗĄņØä ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢ┤ Ļ│äļźśļ│ĆņłśņŚÉ ļö░ļźĖ ņ╝ĆņØ┤ņŖż ĒĢ┤ņäØņØ┤ ņłśĒ¢ēļÉśņŚłļŗż. Ēīīļ×æ ņŖżĒÄÖĒŖĖļ¤╝ņØ┤ ĒÖśĻ▓ĮĒĢśņżæņ£╝ļĪ£ ņĀüņÜ®ļÉśņŚłņ£╝ļ®░ ņØ┤ņŚÉ ļéśĒāĆļé£ ļČłĻĘ£ņ╣Ö ņØæļŗĄņØä ņĀĢņä▒ņĀüņ£╝ļĪ£ ĒÅēĻ░ĆĒĢśĻĖ░ ņ£äĒĢ┤ ņŗ£Ļ│äņŚ┤ ņØæļŗĄņØä FFT(Fast fourier transform) ņĮöļō£ļź╝ ĒåĄĒĢ┤ ņŖżĒÄÖĒŖĖļ¤╝ņ£╝ļĪ£ ļ│ĆĒÖśĒĢśņŚ¼ Ļ│äļźśņä▒ļŖź ļ░Å ļÅÖņĀüĒŖ╣ņä▒ņØä ļ╣äĻĄÉ ļČäņäØĒĢśņśĆļŗż.
2. ņØ┤ļĪĀņØś ņĀĢņŗØĒÖö ļ░Å Ļ░ĆņĀĢ
2.1 ņóīĒæ£Ļ│ä ņĀĢņØś, ĻĖ░ļ│ĖĻ░ĆņĀĢ
ņĄ£ĻĘ╝, Ļ┤ĆļĀ© ņåīĒöäĒŖĖņø©ņ¢┤ņÖĆ ĒĢśļō£ņø©ņ¢┤ņØś ļ░£ļŗ¼ļĪ£ ņĀäņé░ņ£Āņ▓┤ņŚŁĒĢÖņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ┤ņ¢æĻĄ¼ņĪ░ļ¼╝ņØś ņØæļŗĄņØä ņśłņĖĪĒĢśļŖö ņŚ░ĻĄ¼Ļ░Ć Ļ░ĆņåŹĒÖö ļÉśĻ│Ā ņ׳ļŗż. ĒŖ╣Ē׳, ņØ┤ļōż ņŚ░ĻĄ¼ļŖö ņĀüņÜ®ņé¼ļĪĆļŗ©Ļ│äņŚÉņä£ļČĆĒä░ Ļ▓Ćņ”Øļŗ©Ļ│äĻ╣īņ¦Ć ļČĆņ£Āņ▓┤ņØś ļÅÖņĀüņĢłņĀĢņä▒ ĒÖĢļ│┤ņŚÉ ņ╣śņżæĒĢśĻ│Ā ņ׳ļŗż(Nam et al., 2012; Jord├Īn and Beltr├Īn-Aguedo, 2004). ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņĀäņé░ņ£Āņ▓┤ņŚŁĒĢÖ ĒöäļĪ£ĻĘĖļשņØĖ ANSYS-AQWAļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļČĆņ£Āņ▓┤ņØś ņØ╝ņóģņØĖ ĒĢ┤ņĪ░ļźśņÖĖĒĢ┤ņ¢æņŗØņŗ£ņäżņØś ļÅÖņĀü ĒŖ╣ņä▒ņØä ĒīīņĢģĒĢśĻ│Āņ×É ĒĢ£ļŗż. ņØ┤ļź╝ ņ£äĒĢ£ ņØ┤ļĪĀņØś ņĀĢņŗØĒÖöņÖĆ Ļ░ĆņĀĢņØĆ ņĢäļלņÖĆ Ļ░Öļŗż.
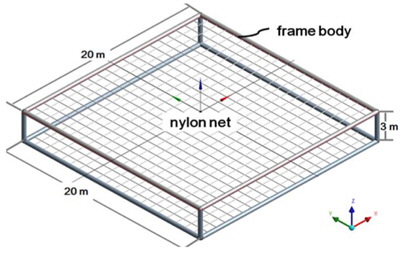
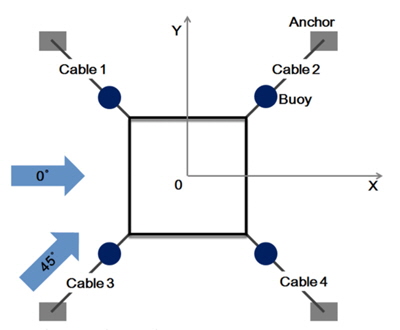
ņóīĒæ£Ļ│äļŖö Fig. 1Ļ│╝ Ļ░ÖņØĆ Ļ│ĄĻ░äĻ│ĀņĀĢņóīĒæ£Ļ│äļź╝ ņé¼ņÜ®ĒĢ£ļŗż. x-y ĒÅēļ®┤ņØ┤ ņłśļ®┤ņØä ļéśĒāĆļé┤ļ®░ +zņČĢņØ┤ ņłśņ¦ü ņāüĒ¢źņØä ļéśĒāĆļéĖļŗż. ņóīĒæ£Ļ│äņØś ņøÉņĀÉņØĆ ņĀĢņłśļ®┤ņāüņŚÉ ņ£äņ╣śĒĢśĻ│Ā ņ×Éņ£Ā ņłśļ®┤ņØĆ ļ¬©ļōĀ ļ░®Ē¢źņ£╝ļĪ£ ļ¼┤ĒĢ£ĒĢśļ®░ ņłśņŗ¼ņØĆ ņØ╝ņĀĢĒĢśļŗż. ĻĄ¼ņĪ░ļ¼╝ņØĆ ļ│ĆĒśĢņØ┤ ņŚåļŖö Ļ░Ģņ▓┤ļĪ£ Ļ│ĀļĀżļÉśņŚłņ£╝ļ®░ ĻĄ¼ņĪ░ļ¼╝ņØś ņżæņŗ¼ņØĆ x-yĒÅēļ®┤ņØś ņøÉņĀÉņŚÉ ņ£äņ╣śĒĢ£ļŗż. ĻĄ¼ņĪ░ļ¼╝ņØĆ ļ│æņ¦ä, ĒÜīņĀäņÜ┤ļÅÖņØä ĒżĒĢ©ĒĢśļŖö ļČĆņ£ĀĻĄ¼ņĪ░ļ¼╝ņØś 6ņ×Éņ£ĀļÅä ņÜ┤ļÅÖņØä ņĘ©ĒĢśļ®░ ļśÉĒĢ£, ņ£Āņ▓┤ļŖö ļ╣äĒÜīņĀäņä▒, ļ╣äņĢĢņČĢņä▒, ļ╣äņĀÉņä▒ņØä ļéśĒāĆļé┤ļŖö ņØ┤ņāüņ£Āņ▓┤ļĪ£ Ļ░ĆņĀĢĒĢśĻ│Ā ņ£ĀļÅÖņןņØĆ ņåŹļÅäĒżĒģÉņģ£ ĒĢ©ņłś ØøĘļĪ£ ņĀĢņØś ļÉĀ ņłś ņ׳ļŗż.

2.2 ņ¦Ćļ░░ļ░®ņĀĢņŗØ
ANSYS-AQWAļŖö 3ņ░©ņøÉ ņäĀĒśĢ ĒżĒģÉņģ£ņØ┤ļĪĀņØä ĻĖ░ļ░śņ£╝ļĪ£ ĒĢśĻ│Ā ņ׳ ļŗż. ņåŹļÅäĒżĒģÉņģ£ ØøĘļŖö ņŗØ (1)Ļ│╝ Ļ░ÖņØ┤ ņ×ģņé¼Ēīī(Incident wave)ņØś ņåŹļÅäĒżĒģÉņģ£ ØøĘI' ņ×ģņé¼ĒīīņØś ņé░ļ×ĆņØä ļéśĒāĆļé┤ļŖö ņé░ļ×ĆĒīī(Diffraction wave) ņåŹļÅäĒżĒģÉņģ£ ØøĘD' ĻĄ¼ņĪ░ļ¼╝ņØś ņÜ┤ļÅÖņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢśļŖö ļ░®ņé¼Ēīī (Radiation wave) ņåŹļÅäĒżĒģÉņģ£ ØøĘRņØś ņżæņ▓®ņ£╝ļĪ£ Ēæ£ĒśäļÉśļ®░ ņŗØ (1)ņØś ņåŹļÅäĒżĒģÉņģ£ ØøĘļŖö ņŗØ (2)ņØś ļ│ĄņåīĒśĢĒā£ļĪ£ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.


ņŚ¼ĻĖ░ņä£, ŽĢļŖö ļ│Ąņåī ņåŹļÅäĒżĒģÉņģ£, ╬Š0 ļŖö ņ×ģņé¼ĒīīņØś ņ¦äĒÅŁ, ŽēļŖö ņ×ģņé¼ĒīīņØś ņ¦äļÅÖņłśļź╝ ļéśĒāĆļé┤ļ®░ j = 1,2,3ņØĆ x, y, zņČĢņØś ļ│æņ¦äņÜ┤ļÅÖ ļ¬©ļō£ņØĖ ņĀäĒøäļÅÖņÜö(Surge), ņóīņÜ░ļÅÖņÜö(Sway), ņāüĒĢśļÅÖņÜö(Heave)ļź╝ Ļ░üĻ░ü ļéśĒāĆļé┤Ļ│Ā j = 4,5,6ļŖö ĒÜīņĀäņÜ┤ļÅÖ ļ¬©ļō£ņØĖ ĒÜĪļÅÖņÜö(Roll), ņóģļÅÖņÜö(Pitch), ņäĀņłśļÅÖņÜö(Yaw)ļź╝ ņØśļ»ĖĒĢ£ļŗż. Ļ░üĻ░üņØś ļ│Ąņåī ņåŹļÅäĒżĒģÉņģ£ ŽĢļŖö ņ¦Ćļ░░ļ░®ņĀĢņŗØņØĖ ļØ╝ĒöīļØ╝ņŖż ļ░®ņĀĢņŗØĻ│╝ Ļ░üĻ░üņØś Ļ▓ĮĻ│äņĪ░Ļ▒┤ņŚÉ ņØśĒĢ┤ņä£ Ļ│äņé░ļÉĀ ņłś ņ׳ļŗż.
2.3 ņÜ┤ļÅÖ ļ░®ņĀĢņŗØ
ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņŚÉ ņ×æņÜ®ĒĢśļŖö ņŻ╝ĒīīņłśņśüņŚŁ ĒĢśņżæņØä Ļ│äņé░ĒĢśņŚ¼ ņŻ╝ĒīīņłśņśüņŚŁ ņÜ┤ļÅÖ ņä▒ļŖźņØä ĒĢ┤ņäØĒĢĀ ņłś ņ׳ļŗż. ĒĢ┤ņāüņØś ļČĆņ£Ā ĻĄ¼ņĪ░ļ¼╝ņØś ņäĀĒśĢ ņÜ┤ļÅÖ ļ░®ņĀĢņŗØņØĆ ņŗØ (3)Ļ│╝ Ļ░ÖņØ┤ ļéśĒāĆļé£ļŗż(Newman, 1997; Journee and Massie, 2001).

ņŚ¼ĻĖ░ņä£, MņØĆ ĻĄ¼ņĪ░ļ¼╝ņØś ņ¦łļ¤ē(Mass), AļŖö ļČĆĻ░Ćņ¦łļ¤ē(Added mass), CļŖö Ļ░ÉņćĀĻ│äņłś(Damping coefficient), KļŖö Ļ░Ģņä▒(Stiffness), FļŖö ņ¦äĒÅŁ ╬Šaļź╝ Ļ░Ćņ¦ĆļŖö ņäĀĒśĢĒīīļ×æņØś Ļ░Ćņ¦äļĀźņØä ļéśĒāĆļéĖļŗż. Ēīīļ×æ ĒĢśņżæĻ│╝ ļ│Ćņ£äļź╝ ņŻ╝Ēīīņłś ŽēņŚÉ ļīĆĒĢ┤ ļ│Ąņåī ĒśĢĒā£ņØĖ X = X0eŌłÆiwt , F = F0╬ŠaeŌłÆiwtņ£╝ļĪ£ ņō░ļ®┤ Ēīīļ×æņŚÉ ļö░ļźĖ ĻĄ¼ņĪ░ļ¼╝ņØś ņŻ╝Ēīīņłś ņśüņŚŁ ņÜ┤ļÅÖļ░®ņĀĢņŗØņØä ļéśĒāĆļé╝ ņłśņ׳ļŗż.
ņäĀĒśĢņ×ģņé¼Ēīīļ×æņØś ņŻ╝ĒīīņłśņŚÉ ļīĆņØæĒĢśļŖö ņÜ┤ļÅÖņØæļŗĄņØä ļéśĒāĆļé┤ļŖö ņ¦äĒÅŁņØæļŗĄĒĢ©ņłśļŖö ņŗØ (4)ņÖĆ Ļ░ÖņØ┤ Ļ│äņé░ļÉ£ļŗż. ņØ┤ ņŗØņŚÉņä£ ļ│Ąņåī ņÜ┤ļÅÖņ¦äĒÅŁņØś ņĀłļīĆĻ░Æ’Į£x(Žē)’Į£ ņØĆ ņŻ╝Ēīīņłś ŽēņØĖ Ēīīļ×æņŚÉ ļīĆņØæĒĢśļŖö ņÜ┤ļÅÖņØś Ēü¼ĻĖ░ļź╝ ņØśļ»ĖĒĢ£ļŗż.

ņŗ£Ļ░äņśüņŚŁ ņÜ┤ļÅÖļ░®ņĀĢņŗØņØĆ ņŻ╝ĒīīņłśņśüņŚŁ ņÜ┤ļÅÖļ░®ņĀĢņŗØņØś ĒæĖļ”¼ņŚÉ ņŚŁļ│ĆĒÖśņØä ĒåĄĒĢ┤ ņ¢╗ņ¢┤ ņ¦ł ņłś ņ׳ļŗż. ņŗ£Ļ░äņśüņŚŁ ņÜ┤ļÅÖļ░®ņĀĢņŗØņØĆ ņŗØ (5)ņØś CumminsņØś ņŗØĻ│╝ Ļ│äņłśļōżļĪ£ Ēæ£ĒśäļÉ£ļŗż(Cummins, 1962).

 (ņ×äĒÄäņŖżņØæļŗĄĒĢ©ņłś),
(ņ×äĒÄäņŖżņØæļŗĄĒĢ©ņłś), 
3. ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś ļ¬©ļŹĖ ļ░Å ĒĢ┤ņäØ ņĪ░Ļ▒┤
3.1 ĒĢ┤ņäØ ļ¬©ļŹĖ
ANSYS-AQWAņØś ĒĢ┤ņäØņŚÉ ņé¼ņÜ®ļÉśļŖö ļ¬©ļŹĖņØĆ Design Modeler ļ¬©ļōłņŚÉņä£ ļ¬©ļŹĖļ¦üļÉ£ļŗż. ļÅÖņłśņŚŁĒĢÖ ĒĢ┤ņäØņŚÉņä£ļŖö ĻĄ¼ņĪ░ļ¼╝ņØś ļé┤ļČĆ ļČĆņ×¼ļź╝ ņĀ£ņÖĖĒĢ£ ļ®┤ņÜöņåīņÖĆ ņäĀņÜöņåīĻ░Ć ņé¼ņÜ®ļÉśļ®░ ņŚ¼ĻĖ░ņä£ ņé¼ņÜ®ļÉśļŖö ņÜöņåīņØś ĻĖ░ĒĢśĒĢÖņĀü ļŹ░ņØ┤Ēä░ļŖö ņŗżņĀ£ ņĀ£ņøÉņØä ņĀüņÜ®ĒĢ£ ļ¬©ļŹĖņØś ĻĄ¼ņĪ░ĒĢ┤ņäØņ£╝ļĪ£ ņ¢╗ņ¢┤ņ¦ä Ļ░ÆņØä ņé¼ņÜ®ĒĢĀ ņłś ņ׳ļŗż(TSNE, 2011).
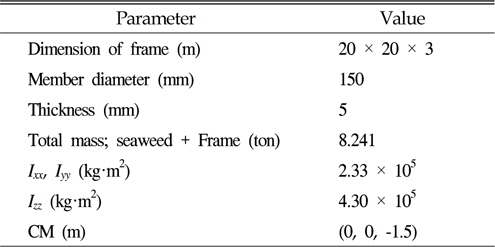
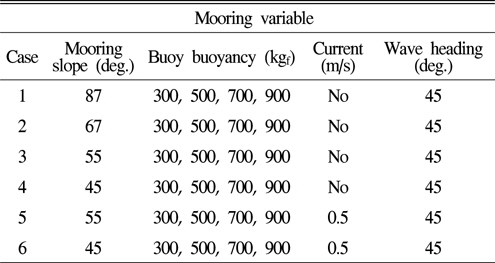
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņāüļČĆ, ĒĢśļČĆņŚÉņä£ ĒĢ┤ņĪ░ļźśļź╝ ņ¢æņāØņŗ£Ēé¼ ņłś ņ׳ļŖö ņé¼ Ļ░üĒöäļĀłņ×äņØä ļīĆņāü ĻĄ¼ņĪ░ļ¼╝ļĪ£ ņäĀņĀĢĒĢśņśĆļŗż. ņØ╝ļ░śņĀüņØĖ ĒĢ┤ņāüņØś ĒöäļĀł ņ×äĻĄ¼ņĪ░ļ¼╝ņØś Ļ▓ĮņÜ░ ņøÉĒśĢĒöäļĀłņ×äĻĄ¼ņĪ░Ļ░Ć ņé¼Ļ░üĒöäļĀłņ×äĻĄ¼ņĪ░ņŚÉ ļ╣äĒĢ┤ Ēīī ļ×æ ņżæ ļŹö ņ£Āļ”¼ĒĢ£ ļÅÖņĀüĒŖ╣ņä▒ņØ┤ ļéśĒāĆļéśņ¦Ćļ¦ī ļīĆļ¤ēņ¢æņŗØņØ┤ļØ╝ļŖö ļ¬®ņĀü ņŚÉ ļ¦×ņČ░ ĒÖĢņןņä▒ņØ┤ ļŹö ņÜ®ņØ┤ĒĢ£ ņé¼Ļ░üĒöäļĀłņ×äņØä ļīĆņāü ļ¬©ļŹĖļĪ£ ņäĀņĀĢĒĢś ņśĆļŗż. ĒöäļĀłņ×äļČĆļŖö Ļ░ĢĻ┤Ć ļČĆņ×¼ļĪ£ ĻĄ¼ņä▒ļÉśĻ│Ā ĒĢ┤ņĪ░ļźś ņ¢æņāØļČĆ(Curing unit)ļŖö Ļ▓®ņ×ÉĒśĢņŗØņØĖ ļéśņØ╝ļĪĀ ļ¦Ø(Nylon net)ņ£╝ļĪ£ ņØ┤ļŻ©ņ¢┤ņĀĖņ׳ļŗż. Fig. 2ļŖö ļīĆņāü ĻĄ¼ņĪ░ļ¼╝ņØś ļ¬©ļŹĖņØä ļéśĒāĆļé┤ļ®░ ļ¬©ļŹĖņØś ņĀ£ņøÉņØĆ Table 1Ļ│╝ Ļ░Öļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ Ļ│ĀļĀżļÉ£ ļīĆņāü ĒĢ┤ņĪ░ļźśļŖö ĒĢÖļ¬ģ Laminaria saccharina ļŗżņŗ£ļ¦łĻ│╝ņŚÉ ņåŹĒĢśļŖö ļīĆĒśĢ ĒĢ┤ņĪ░ļźśņØ┤ļ®░ ĒĢ┤ņĪ░ļźśņØś ņä▒ņן ĒøäņØś ņ¦łļ¤ēņØä ļ¬©ļŹĖņŚÉ ņĀüņÜ®ņŗ£ņ╝£ ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņśĆļŗż. ĒĢ┤ņĪ░ļźśņŚÉ ņØśĒĢ£ ļČĆĻ░Ć ņ¦łļ¤ēņØĆ Bela and Cornelia(2004)Ļ░Ć ņśłļ╣äņŗżĒŚśņŚÉņä£ ņĀ£ņŗ£ĒĢ£ ĻĖ░ļīĆņ╣śņØĖ 4kg/mņ£╝ļĪ£ Ļ│äņé░ļÉśņŚłļŗż. ļ│Ė ĒĢ┤ņäØņŚÉņä£ņØś ņĀüņÜ®ļÉ£ ĒĢ┤ņĪ░ļźśņØś ņ┤Ø ņ¦łļ¤ēņØĆ 5.12tonņØ┤ļ®░ ņĀÉ ņ¦łļ¤ē(Point mass)ņ£╝ļĪ£ ļéśļłĀ ņĀüņÜ®ĒĢśņśĆļŗż.
3.2 Ļ│äļźśņŗ£ņŖżĒģ£ ļ¬©ļŹĖ
ĒśäņłśņäĀ(Catenary) Ļ│äļźśļ░®ņŗØņØĆ Ļ░ĢĒĢ£ ņÖĖļĀźņØ┤ ņĪ┤ņ×¼ĒĢśļŖö ņÖĖĒĢ┤ņŚÉņä£ Ēü░ Ēæ£ļźśļ│Ćņ£äņŚÉ ļģĖņČ£ļÉśņ¢┤ ņ׳ņ¢┤ ĻĘĖļ¼╝ļ¦ØņØ┤ļéś ĒöäļĀłņ×äņŚÉ ļ¦łļ¬©ļÉśļŖö ļ¼ĖņĀ£ļź╝ ļ░£ņāØņŗ£Ēé¼ ņłś ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ĒĢ┤ņĪ░ļźśņ¢æņŗØņŗ£ņäżņØś Ļ│äļźśņŗ£ņŖżĒģ£ ņĀüĒĢ®ĒĢśņ¦Ć ņĢŖļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Ēæ£ļźś ļ│Ćņ£äņØś Ļ░ÉņåīņÖĆ ļČĆņ£Āņ▓┤ņØś ņÜ┤ļÅÖņØ┤ ņ£ĀņŚ░ĒĢśĻ▓ī ĒØĪņłśļÉĀ ņłś ņ׳ļŖö ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņĀüņÜ®ĒĢśņśĆļŗż. ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ ļéśņØ╝ļĪĀļĪ£Ēöäļź╝ ņØ┤ņÜ®ĒĢ┤ ĻĄ¼ņĪ░ņ▓┤ņÖĆ ļČĆņØ┤ļź╝ ņŚ░Ļ▓░ĒĢśĻ│Ā ņÖĆņØ┤ņ¢┤ļĪ£Ēöäļź╝ ņØ┤ņÜ®ĒĢ┤ ļČĆņØ┤ņÖĆ ņĢĄņ╗żļź╝ ņŚ░Ļ▓░ĒĢśļŖö ĻĄ¼ņĪ░ņØ┤ļ®░ ĒīīļĀźļ░£ņĀä, Ļ░ĆļæÉļ”¼ņÖĆ Ļ░ÖņØĆ ņżæņåīĒśĢ ĒĢ┤ņ¢æĻĄ¼ņĪ░ļ¼╝ņØä ļīĆņāüņ£╝ļĪ£ ņĀüņÜ®ļÉśņŚłļŗż(Lien et al, 1989; Lien et al, 1996; Shin and Hong, 2005; Kim et al., 2001; Kim et al.,2002).
ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņĀüņÜ®ĒĢ£ ņ¢æņŗØņŗ£ņäżņØĆ Fig. 3Ļ│╝ Ļ░ÖņØ┤ ļéśĒāĆļé╝ ņłś ņ׳ļŗż. ņłśņżæņŚÉņä£ņØś Ļ│äļźśļĪ£Ēöä ņżæļ¤ēĻ│╝ ļČĆņØ┤ņØś ļČĆļĀźņØś ņ░©ņØ┤, Ļ▓Įņé¼Ļ░üņŚÉ ņØśĒĢ┤ Ļ│äļźśļĪ£ĒöäņØś ņ┤łĻĖ░ ņןļĀźņØ┤ Ļ▓░ņĀĢļÉśļ®░ ĒĢśņżæņŚÉ ņØśĒĢ£ ĻĄ¼ņĪ░ļ¼╝ņØś ņÜ┤ļÅÖņŚÉ ļö░ļØ╝ ļĪ£ĒöäņØś ņןļĀźņØ┤ ļ│ĆĒÖöĒĢ£ļŗż. Ļ│äļźśņŗ£ņŖżĒģ£ņØś ļ¬©ļŹĖļ¦üņØĆ ANSYS-AQWAņŚÉņä£ ņłśĒ¢ēļÉśļ®░ ļ│Ė ĒöäļĪ£ĻĘĖļשņØĆ ņäĀĒśĢĒāäņä▒ņÜöņåī (Linear elastic element), ļ╣äņäĀĒśĢĒśäņłśņÜöņåī(Nonlinear catenary element), ļ╣äņäĀĒśĢļŗżĒĢŁņÜöņåī(Nonlinear polynomial element), ļ╣äņäĀĒśĢ ņÖĆņØ┤ņ¢┤ņÜöņåī(Nonlinear wire element)ņØś Ļ│äļźśņÜöņåīļź╝ ņ¦ĆņøÉĒĢ£ļŗż. ĒŖ╣Ē׳, ĒśäņłśĻ│äļźśņŗ£ņŖżĒģ£ņØś Ļ▓ĮņÜ░ ņŚ░Ļ▓░ņÜöņåī(Joint element)ļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļæÉ Ļ░Ćņ¦Ć ņØ┤ņāüņØś Ļ│äļźśļĪ£Ēöäļź╝ ņŚ░Ļ▓░ĒĢśņŚ¼ ņé¼ņÜ® ĒĢĀ ņłś ņ׳ļŗż(ANSYS, 2010).
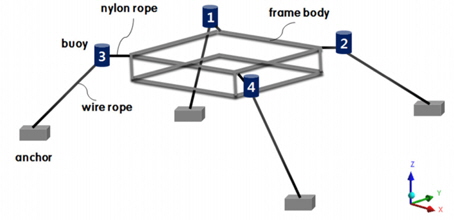
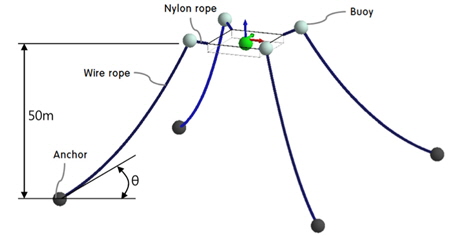
ļ│Ė ļīĆņāü ļ¬©ļŹĖņŚÉņä£ļŖö 4ņĀÉ ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØä ņĀüņÜ®ĒĢśņśĆļŗż. ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØĆ ņĢĄņ╗żņÖĆ ļČĆņØ┤, ļĪ£ĒöäļĪ£ ĻĄ¼ņä▒ļÉśļ®░ ņĢĄņ╗żņÖĆ ļČĆņØ┤ļŖö ņÖĆņØ┤ņ¢┤ļĪ£ĒöäļĪ£ ĒöäļĀłņ×äĻ│╝ ļČĆņØ┤ļŖö ļéśņØ╝ļĪĀļĪ£Ēöä(7m)ļĪ£ ņŚ░Ļ▓░ļÉśņŚłļŗż. ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØ┤ ņĀüņÜ®ļÉ£ ļ¬©ļŹĖņØĆ Fig. 4ņÖĆ Ļ░Öļŗż. 2Ļ░£ņØś ļĪ£Ēöäļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļ¬©ļŹĖļ¦ü ļÉśņŚłņ£╝ļ®░ ņŚ░Ļ▓░ļČĆņØ┤(Joint buoy)ļź╝ ņé¼ņÜ®ĒĢ┤ Ļ░üĻ░üņØś ļĪ£Ēöäļź╝ ņŚ░Ļ▓░ĒĢśņśĆļŗż. ņĢĄņ╗żļŖö ĒĢ┤ņĀĆļ®┤(ņłśņŗ¼, 50m)ņŚÉ Ļ│ĀņĀĢļÉ£ Ļ▓āņ£╝ļĪ£ ĒĢśļ®░ ņÖĆņØ┤ņ¢┤ļĪ£ĒöäņØś ĻĖĖņØ┤ļŖö Ļ│äļźśĻ░ü(Ų¤)ņŚÉ ļö░ļØ╝ ļŗ¼ļØ╝ņ¦äļŗż. ņé¼ņÜ®ļÉ£ ļĪ£ĒöäņØś ļ¼╝ņä▒ņ╣śļŖö Table 2ņÖĆ Ļ░Öļŗż.
3.3 ĒÖśĻ▓ĮĒĢśņżæņØś ņĀüņÜ®
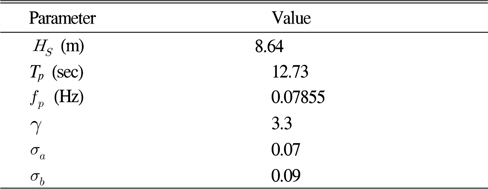
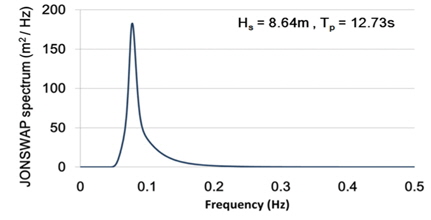
ņŗżņĀ£ ĒĢ┤ņāüņØĆ ĒīīĻ│Ā, ĒīīņןņØ┤ ļŗżļźĖ ņłśļ¦ÄņØĆ ĒīīĻ░Ć ņżæņ▓®ļÉśņ¢┤ ļČłĻĘ£ņ╣ÖĒĢ£ ņāüĒā£ņ×äņ£╝ļĪ£ Ļ░üĻ░üņØś Ēīīļ×æ ņŚÉļäłņ¦Ćļź╝ Ēīīļ×æ ņŻ╝ĒīīņłśņŚÉ ļīĆĒĢ┤ ļéśĒāĆļéĖ Ēīīļ×æ ņŖżĒÄÖĒŖĖļ¤╝ņŚÉ ņØśĒĢ┤ ņĀĢņØś ļÉ£ļŗż. ļ│Ė ĒĢ┤ņäØņŚÉņä£ļŖö ĒÅŁĒÆŹņØ┤ ļ░£ņāØĒĢ£ ĒĢ┤ņ¢æ ĒÖśĻ▓ĮņØä ļéśĒāĆļé┤ļŖö JONSWAP ņŖżĒÄÖĒŖĖļ¤╝ņØä ņé¼ņÜ®ĒĢśņśĆļŖöļŹ░ ņØ┤ļŖö ņŗØ (6)Ļ│╝ Ļ░ÖņØ┤ ņ£ĀĒÜ©ĒīīĻ│Ā HsņÖĆ ņŖżĒÄÖĒŖĖļ¤╝ņØś Ēö╝Ēü¼ ņŻ╝Ēīīņłś fp Ēś╣ņØĆ 1/TpņØś ĒĢŁņ£╝ļĪ£ Ēæ£ĒśäļÉ£ļŗż(Goda, 2000).
JONSWAP ņŖżĒÄÖĒŖĖļ¤╝ņØś Ēīīļ×æ ņĀ£ņøÉņØĆ ļé©ĒĢ┤ņĢł 50ļģä ļ╣łļÅä ņäżĻ│äĒīī (KIOST, 2005)ļź╝ ņĀüņÜ®ĒĢśņśĆņ£╝ļ®░ Table 3Ļ│╝ Ļ░Öļŗż. Ēæ£ņØś ņĀ£ņøÉņŚÉ ņØśĒĢ£ JONSWAP ņŖżĒÄÖĒŖĖļ¤╝ ĒśĢņāüņØĆ Fig. 5ņÖĆ Ļ░Öļŗż. ļśÉĒĢ£ ĒĢ┤ņĪ░ļźś ņ¢æņŗØ ņŗ£ņäżņØ┤ Ēīīļ×æĻ│╝ 45┬░ļ░®Ē¢źņ£╝ļĪ£ ņäżņ╣śļÉ£ļŗżļŖö Ļ▓āņØä Ļ░ĆņĀĢĒĢśņŚ¼ ĒīīĒ¢źņØä Fig. 6Ļ│╝ Ļ░ÖņØ┤ 45┬░ļĪ£ Ļ│ĀņĀĢĒĢśņśĆļŗż.

ņŚ¼ĻĖ░ņä£,  ,
, 
,
4. ņłśņ╣śĒĢ┤ņäØ Ļ▓░Ļ│╝
4.1 ņŗ£Ļ░äņśüņŚŁ ņÜ┤ļÅÖņØæļŗĄ ĒĢ┤ņäØ
ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś Ļ│äļźśļ│ĆņłśņŚÉ ļīĆĒĢ£ ņśüĒ¢źņØä ļČäņäØĒĢśĻĖ░ ņ£äĒĢ┤ ņŗ£Ļ░ä ņśüņŚŁ ņłśņ╣ś ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņŗ£Ļ░äņśüņŚŁ ņłśņ╣ś ņŗ£ļ«¼ļĀłņØ┤ņģśņØĆ Hydrodynamic diffraction ļ¬©ļōłņŚÉņä£ ņŻ╝ĒīīņłśņśüņŚŁĒĢ┤ņäØņØä ņłśĒ¢ēĒĢ£ Ēøä Hydrodynamic time response ļ¬©ļōłņŚÉņä£ ņŚ░ļÅÖļÉśņ¢┤ ņłśĒ¢ēļÉ£ļŗż. ņŗ£Ļ░äņśüņŚŁĒĢ┤ņäØņØĆ ļČłĻĘ£ņ╣ÖĒīīļ×æņŚÉ ļīĆĒĢ£ ņ£ĀņŚ░ļČĆņØ┤Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ņĢĄņ╗żņÖĆ ļČĆņØ┤ņØś Ļ▓Įņé¼Ļ░ü, ļČĆņØ┤ņØś ļČĆļĀźņØä ļ│ĆĒÖöņŗ£ņ╝£ ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņśĆļŗż. ĒĢśņżæņĪ░Ļ▒┤Ļ│╝ ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņŚÉ ļīĆĒĢ£ ĒĢ┤ņäØņĪ░Ļ▒┤ņØä Table 4ņŚÉ ļéśĒāĆļé┤ņŚłļŗż. ņŚ¼ĻĖ░ņä£ Ēīīļ×æ ņĀ£ņøÉņØĆ Table 3Ļ│╝ Ļ░Öņ£╝ļ®░, ļČĆņØ┤ņØś ņżæļ¤ēņØĆ ĻĖ░ņĪ┤ ņĀ£ĒÆłņØä ĻĖ░ņżĆņ£╝ļĪ£ ņäĀņĀĢĒĢśņśĆĻ│Ā, Ļ│äļźśĻ░üņØĆ 45┬░ļ│┤ļŗż Ēü¼Ļ▓ī ņäĀņĀĢĒĢ©ņ£╝ļĪ£ņŹ© ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØ┤ ĻĄ░ņ£╝ļĪ£ ņäżņ╣śļÉĀ ļĢī ņŗ£ņäżĻ░äņØś ņ×æņŚģĻ▒░ļ”¼ ĒÖĢļ│┤Ļ░Ć ņÜ®ņØ┤ĒĢśļÅäļĪØ ĒĢśņśĆļŗż. ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś Ļ│äļźśļ│ĆņłśņŚÉ ļīĆĒĢ£ ņśüĒ¢źņØä ļČäņäØĒĢśĻĖ░ ņ£äĒĢ┤ ņŗ£Ļ░ä ņśüņŚŁ ņłśņ╣ś ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņŗ£Ļ░äņśüņŚŁ ņłśņ╣ś ņŗ£ļ«¼ļĀłņØ┤ņģśņØĆ Hydrodynamic diffraction ļ¬©ļōłņŚÉņä£ ņŻ╝ĒīīņłśņśüņŚŁĒĢ┤ņäØņØä ņłśĒ¢ēĒĢ£ Ēøä Hydrodynamic time response ļ¬©ļōłņŚÉņä£ ņŚ░ļÅÖļÉśņ¢┤ ņłśĒ¢ēļÉ£ļŗż. ņŗ£Ļ░äņśüņŚŁĒĢ┤ņäØņØĆ ļČłĻĘ£ņ╣ÖĒīīļ×æņŚÉ ļīĆĒĢ£ ņ£ĀņŚ░ļČĆņØ┤Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ņĢĄņ╗żņÖĆ ļČĆņØ┤ņØś Ļ▓Įņé¼Ļ░ü, ļČĆņØ┤ņØś ļČĆļĀźņØä ļ│ĆĒÖöņŗ£ņ╝£ ĒĢ┤ņäØņØä ņłśĒ¢ēĒĢśņśĆļŗż. ĒĢśņżæņĪ░Ļ▒┤Ļ│╝ ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņŚÉ ļīĆĒĢ£ ĒĢ┤ņäØņĪ░Ļ▒┤ņØä Table 4ņŚÉ ļéśĒāĆļé┤ņŚłļŗż. ņŚ¼ĻĖ░ņä£ Ēīīļ×æ ņĀ£ņøÉņØĆ Table 3Ļ│╝ Ļ░Öņ£╝ļ®░, ļČĆņØ┤ņØś ņżæļ¤ēņØĆ ĻĖ░ņĪ┤ ņĀ£ĒÆłņØä ĻĖ░ņżĆņ£╝ļĪ£ ņäĀņĀĢĒĢśņśĆĻ│Ā, Ļ│äļźśĻ░üņØĆ 45┬░ļ│┤ļŗż Ēü¼Ļ▓ī ņäĀņĀĢĒĢ©ņ£╝ļĪ£ņŹ© ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØ┤ ĻĄ░ņ£╝ļĪ£ ņäżņ╣śļÉĀ ļĢī ņŗ£ņäżĻ░äņØś ņ×æņŚģĻ▒░ļ”¼ ĒÖĢļ│┤Ļ░Ć ņÜ®ņØ┤ĒĢśļÅäļĪØ ĒĢśņśĆļŗż.
ĒĢ┤ņäØņŚÉņä£ņØś ņŗ£Ļ░äņśüņŚŁņØĆ 1000ņ┤łņØ┤Ļ│Ā ņØæļŗĄņØś Ļ░äĻ▓®ņØĆ 0.1ņ┤łņØ┤ļŗż. ņŗ£Ļ░äņśüņŚŁĒĢ┤ņäØņØä ĒåĄĒĢ┤ ĻĄ¼ņĪ░ļ¼╝ņØś ņŗ£Ļ│äņŚ┤ ļÅÖņÜöņØæļŗĄĻ│╝ ņŗ£Ļ│äņŚ┤ ļĪ£ĒöäņןļĀźņØæļŗĄņØä Ļ│äņé░ĒĢśņśĆļŗż. ļÅÖņÜöļŖö ņ¦łļ¤ēņżæņŗ¼ņØś Ļ▒░ļÅÖņØä ņØśļ»ĖĒĢśļ®░ ļĪ£ĒöäņןļĀźņØĆ Fig. 6ņŚÉ ļéśĒāĆļéĖ 3ļ▓ł ļĪ£ĒöäņØś ņŗ£Ļ│äņŚ┤ ņØæļŗĄņØä ļéśĒāĆļéĖļŗż. ļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźņØĆ Ļ│äļźśļ│ĆņłśņØĖ ļČĆņØ┤ņØś ļČĆļĀź Ēü¼ĻĖ░, ņĢĄņ╗żņÖĆ ļČĆņØ┤ņØś Ļ▓Įņé¼Ļ░ü, ņłśņżæņŚÉņä£ņØś ļĪ£Ēöä ņżæļ¤ēņŚÉ ļīĆĒĢ┤ ņżĆņĀĢņĀüņ£╝ļĪ£ Ļ│äņé░ļÉĀ ņłś ņ׳ļŗż. Ļ│äļźśļ│ĆņłśņŚÉ ņØśĒĢ£ ņ╝ĆņØ┤ņŖż ļ│äļĪ£ ļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźņØä ļÅäņŗ£ĒĢśņśĆĻ│Ā ĻĄ¼ņĪ░ļ¼╝ņØś ļÅÖņÜöņÖĆ ļĪ£Ēöä ņןļĀźņØś ļČłĻĘ£ņ╣Ö ņŗ£Ļ│äņŚ┤ ņØæļŗĄņØä ņłśņ╣śĒĢ┤ņäØņØä ĒåĄĒĢ┤ Ļ│äņé░ĒĢśņśĆļŗż. ļśÉĒĢ£ ļČłĻĘ£ņ╣Ö ņŗ£Ļ│äņŚ┤ ļŹ░ņØ┤Ēä░ļŖö FFTļź╝ ĒåĄĒĢ┤ ņŻ╝ĒīīņłśņśüņŚŁņØś ņŖżĒÄÖĒŖĖļ¤╝ņ£╝ļĪ£ ļ│ĆĒÖśļÉśņ¢┤ ļ╣äĻĄÉļÉśņŚłļŗż. ĻĄ¼ņĪ░ļ¼╝ņØś ņŗ£Ļ│äņŚ┤ ļÅÖņÜöņØæļŗĄņØĆ ļ│æņ¦äņÜ┤ļÅÖļ¬©ļō£ņØĖ ņĀäĒøäļÅÖņÜö, ņāüĒĢśļÅÖņÜöņØś ļæÉ Ļ░£ņØś ņØæļŗĄņØ┤ Ļ│ĀļĀżļÉśņŚłļŗż. ņŚ¼ĻĖ░ņä£ ņóīņÜ░ļÅÖņÜöļŖö ņĀäĒøäļÅÖņÜöļĪ£ļČĆĒä░ ņśłņĖĪĒĢĀ ņłś ņ׳ļŗż.
4.2 ļĪ£Ēöä ņ┤łĻĖ░ņןļĀź
Fig. 7ņØĆ ĒĢ┤ņäØ ņ╝ĆņØ┤ņŖżņŚÉ ļö░ļźĖ ļĪ£ĒöäņØś ņ┤łĻĖ░ ņןļĀźņØä ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. ļČĆļĀźņØś Ēü¼ĻĖ░Ļ░Ć ņ”ØĻ░ĆĒĢĀņłśļĪØ ļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźņØĆ ņäĀĒśĢņĀüņ£╝ļĪ£ ņ”ØĻ░ĆĒĢ©ņØä ļ│┤ņØ┤ļ®░ ņØ┤ļŖö Kim et al.(2002)ņØś ņĀĢņĀüņŗżĒŚśņØä ĒåĄĒĢ£ ņןļĀź Ļ│äņĖĪ Ļ▓░Ļ│╝ņÖĆ ļČĆĒĢ®ĒĢ£ļŗż. ļśÉĒĢ£, ļéśņØ╝ļĪĀļĪ£ĒöäņןļĀźņØś ņ”ØĻ░Ć ĒÅŁļ│┤ļŗż ņÖĆņØ┤ņ¢┤ļĪ£ĒöäņןļĀźņØś ņ”ØĻ░Ć ĒÅŁņØ┤ ļŹö Ēü¼Ļ▓ī ļéśĒāĆļé£ļŗż. ņØ┤ļŖö ļČĆņØ┤ ĒĢśļČĆņŚÉ ņ׳ļŖö ņÖĆņØ┤ņ¢┤ļĪ£ĒöäĻ░Ć ļČĆņØ┤ņÖĆ ņłśĒÅēĒĢśĻ▓ī ņ£äņ╣śļÉśļŖö ļéśņØ╝ļĪĀļĪ£ĒöäņŚÉ ļ╣äĒĢ┤ ļČĆņØ┤ņØś ļČĆļĀźņŚÉ ļŹö ņ¦Ćļ░░ņĀüņ×äņØä ļéśĒāĆļéĖļŗż. ļ░śļ®┤ Ļ│äļźśĻ▓Įņé¼Ļ░üņØś ļ│ĆĒÖöņŚÉņä£ļŖö Ļ│äļźś Ļ▓Įņé¼Ļ░üņØ┤ ņÖäļ¦īĒĢ┤ņ¦łņłśļĪØ ļéśņØ╝ļĪĀļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźņØ┤ ņÖĆņØ┤ņ¢┤ļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźļ│┤ļŗż ļŹö Ēü¼Ļ▓ī ļéśĒāĆļé¼ņ£╝ļ®░ ņØ┤ļŖö Ļ│äļźśĻ▓Įņé¼Ļ░üņØ┤ ļé«ņĢäņ¦łņłśļĪØ Ļ│äļźśļĪ£ĒöäņØś ņłśĒÅēņןļĀź ņä▒ļČäņØ┤ ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ņØśļ»ĖĒĢ£ļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż.

4.3 ļÅÖņÜö ņØæļŗĄ
Fig. 8ņØĆ Ļ░üĻ░üņØś ņ╝ĆņØ┤ņŖżņØś ņŗ£Ļ│äņŚ┤ ļÅÖņÜöņØæļŗĄņŚÉņä£ ļéśĒāĆļé£ ņĄ£ļīĆ ļÅÖņÜö Ļ░ÆņØä ļéśĒāĆļéĖļŗż. Ēīīļ×æĒĢśņżæļ¦ī ņ×æņÜ®ĒĢśņśĆņØä ņŗ£(Case 1~4) ļČĆņØ┤ņØś ļČĆļĀźņØ┤ ņ”ØĻ░ĆĒĢśļŖö ļ¬©ļōĀ Ļ▓ĮņÜ░ņŚÉņä£ ĻĄ¼ņĪ░ļ¼╝ņØś ņĄ£ļīĆ ņĀäĒøäļÅÖņÜö Ļ░ÆņØĆ Ļ░ÉņåīĒĢśņśĆņ£╝ļ®░ Ļ│äļźś Ļ▓Įņé¼Ļ░üņØ┤ ņ×æņĢäņ¦ĆļŖö Ļ▓ĮņÜ░ņŚÉņä£ļÅäņĀäĒøäļÅÖņÜö Ļ░ÆņØĆ Ļ░ÉņåīĒĢśļŖö Ļ▓ĮĒ¢źņØ┤ ļéśĒāĆļé¼ļŗż. ņØ┤ļŖö Ļ░üĻ░ü ņ£ĀņŚ░ļČĆņØ┤Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ļČĆņØ┤ņØś ļČĆļĀźĻ│╝ Ļ│äļźśĻ▓Įņé¼Ļ░üņØś ļ│ĆĒÖöņŚÉ ņØśĒĢ£ ļĪ£Ēöä ņ┤łĻĖ░ņןļĀźņØś ņ”ØĻ░ĆņŚÉ ĻĖ░ņØĖĒĢśļŖö Ļ▓āņ×äņØä ņĢī ņłś ņ׳ļŗż.
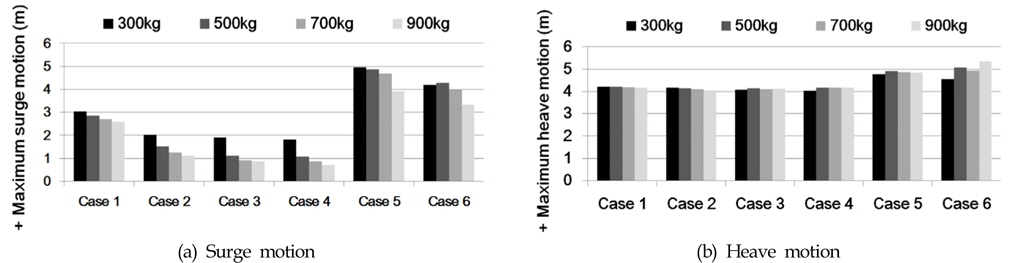
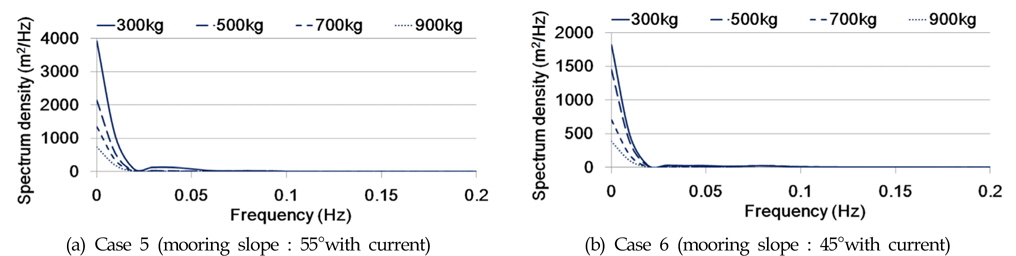
ļśÉĒĢ£ ņĪ░ļźśļź╝ Ļ│ĀļĀżĒĢśņśĆņØä ņŗ£(Case 5, 6)ņØś ņĄ£ļīĆ ņĀäĒøäļÅÖņÜö Ļ░ÆņØĆ ĻĘĖļĀćņ¦Ć ņĢŖņØĆ Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢ┤ Ēü¼Ļ▓ī ļéśĒāĆļéśļ®░ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ļČĆņØ┤ņØś ļČĆļĀźņØ┤ ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ļÅÖņÜöļŖö Ļ░ÉņåīĒĢśļŖö Ļ▓ĮĒ¢źņØä ļéśĒāĆļéĖļŗż.
ņāüĒĢśļÅÖņÜöņØś Ļ▓ĮņÜ░ Ēīīļ×æĒĢśņżæļ¦ī ņ×æņÜ®ĒĢśņśĆņØä ņŗ£(Case 1~4) Ļ│äļźśļ│ĆņłśņØĖ ļČĆņØ┤ņØś ļČĆļĀźĻ│╝ Ļ│äļźśĻ▓Įņé¼Ļ░üņØś ļ│ĆĒÖöņŚÉ ļīĆĒĢ┤ ņĄ£ļīĆļÅÖņÜö Ļ░ÆņØ┤ ņ£Āņé¼ĒĢśĻ▓ī ļéśĒāĆļé¼ņ£╝ļ®░ ņĪ░ļźś Ļ│ĀļĀż ņŗ£(Case 5, 6) ņĪ░ļźśņŚÉ ņØśĒĢ£ ņĀäĒøäļÅÖņÜöņØś Ēü░ ņ”ØĻ░ĆļĪ£ ņØĖĒĢ┤ ņāüĒĢś ļÅÖņÜö ļśÉĒĢ£ ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ļŗż.
4.4 ņÜ┤ļÅÖ ņŖżĒÄÖĒŖĖļ¤╝
ņ╝ĆņØ┤ņŖż ĒĢ┤ņäØņŚÉņä£ Ļ│äņé░ļÉ£ ņŗ£Ļ│äņŚ┤ ņÜ┤ļÅÖņØæļŗĄņØä FFT ņĮöļō£ļź╝ ĒåĄĒĢ┤ ļ│ĆĒÖśņŗ£ņ╝£ ņ¢╗ņØĆ ņŖżĒÄÖĒŖĖļ¤╝ņØä Fig. 9ņÖĆ 10ņŚÉ ļÅäņŗ£ĒĢśņśĆļŗż. ļČłĻĘ£ņ╣ÖĒĢ£ ņŗ£Ļ│äņŚ┤ ņØæļŗĄņØä ņŖżĒÄÖĒŖĖļ¤╝ņØä ĒåĄĒĢ┤ ņĀĢņä▒ņĀüņ£╝ļĪ£ ļ╣äĻĄÉĒĢśņśĆņ£╝ļ®░ Ēö╝Ēü¼ Ļ░ÆĻ│╝ ĻĘĖņŚÉ ņāüņØæĒĢśļŖö Ēö╝Ēü¼ ņŻ╝Ēīīņłśļź╝ ĒÖĢņØĖĒĢśņśĆļŗż.
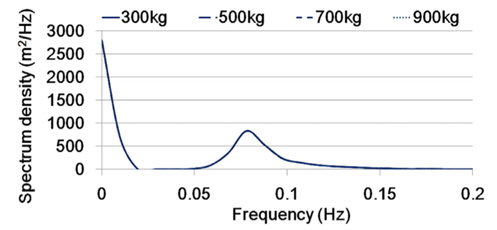

Fig. 9ļŖö ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś ņāüĒĢśļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ņØä ļéśĒāĆļéĖļŗż. ņ¢æņŗØņŗ£ņäżņØś ņāüĒĢśļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ņØĆ Ēīīļ×æņØś ņĀĆņŻ╝Ēīīņłś ņśüņŚŁ ĒĢśņżæņä▒ļČäņŚÉ ņ¦Ćļ░░ņĀüņ×äņØä ļ│╝ ņłś ņ׳ņ£╝ļ®░ Ēö╝Ēü¼ ņŻ╝ĒīīņłśļŖö 0.0781HzļĪ£ Ēīīļ×æĒĢśņżæņØś Ēö╝Ēü¼ ņŻ╝Ēīīņłś 0.0785HzņÖĆ ņ£Āņé¼ĒĢśĻ▓ī ļéśĒāĆļé¼ļŗż. ļśÉĒĢ£, ņāüĒĢśļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ņØś Ļ▓ĮņÜ░ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ļČĆļĀźņØś Ēü¼ĻĖ░ņÖĆ Ļ│äļźśĻ▓Įņé¼Ļ░üņŚÉ ļö░ļźĖ ļ¬©ļōĀ ĒĢ┤ņäØ ņ╝ĆņØ┤ņŖżņŚÉņä£ ņ£Āņé¼ĒĢ£ ņØæļŗĄņØ┤ ļéśĒāĆļé£ļŗż. ņØ┤ļŖö ņāüĒĢśļÅÖņÜöņØś Ļ▓ĮņÜ░ ļ│Ė Ļ│äļźśņŗ£ņŖżĒģ£ņØś ņśüĒ¢źņØä ļ░øņ¦Ć ņĢŖĻ│Ā ļÅģļ”ĮņĀüņ×äņØä ņØśļ»ĖĒĢ£ļŗż. ņØ┤ļŖö KIOST(2003)ņØś ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ ņä▒ļŖźĒÅēĻ░Ć ņŚ░ĻĄ¼ņŚÉņä£ņØś ņłśņ╣śņŗżĒŚś Ļ▓░Ļ│╝ņÖĆ ļČĆĒĢ®ļÉ£ļŗż.
Fig. 10ņØĆ Ēīīļ×æĒĢśņżæļ¦ī ņ×æņÜ®ĒĢśņśĆņØä ņŗ£(Case 1~4)ņØś ņĀäĒøäļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ņØä ļéśĒāĆļéĖļŗż. ņāüĒĢśļÅÖņÜöņÖĆ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ Ēö╝Ēü¼ ņŻ╝ĒīīņłśļŖö 0.781HzļĪ£ Ēīīļ×æņŖżĒÄÖĒŖĖļ¤╝ņØś Ēö╝Ēü¼ ņŻ╝ĒīīņłśņÖĆ ņ£Āņé¼ĒĢśĻ▓ī ļéśĒāĆļé£ļŗż.
Case 1(Mooring slope: 87┬░) ļČĆņØ┤ 300kgņØś Ļ▓ĮņÜ░ ņĀĆņŻ╝ĒīīņłśņśüņŚŁņŚÉņä£ņØś ņØæļŗĄņØ┤ ļ¦żņÜ░ Ēü¼Ļ▓ī ļ░£ņāØĒĢśļ®░ ļČĆņØ┤ņØś ļČĆļĀźņØś Ēü¼ĻĖ░Ļ░Ć ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ņĀĆņŻ╝ĒīīņłśņśüņŚŁņŚÉņä£ņØś ņØæļŗĄ Ēü¼ĻĖ░Ļ░Ć ĻĖēĻ▓®Ē׳ Ļ░ÉņåīĒĢśļŖö Ļ▓āņØä ļ│╝ ņłś ņ׳ļŗż. ļśÉĒĢ£, ļ¬©ļōĀ Ļ▓ĮņÜ░ņŚÉņä£ ļČĆņØ┤ņØś ļČĆļĀź ņ”ØĻ░ĆņÖĆ Ļ│äļźśĻ▓Įņé¼Ļ░üņØ┤ ļé«ņĢäņ¦ÉņŚÉ ļö░ļØ╝ ņØæļŗĄņØś Ēü¼ĻĖ░Ļ░Ć Ļ░ÉņåīĒĢ£ļŗż.
Fig. 11ņØĆ ņČöĻ░ĆņĀüņØĖ ņĪ░ļźśĒĢśņżæ Ļ│ĀļĀż ņŗ£(Case 5, 6) ņĀäĒøäļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ņØä ļéśĒāĆļé┤Ļ│Ā ņ׳ļŗż. Ļ░ÖņØĆ Ļ│äļźśņĪ░Ļ▒┤ņØĖ Fig. 10ņØś (c), (d)ņÖĆņØś ļ╣äĻĄÉ ņŗ£ ņĀĆņŻ╝ĒīīņłśņśüņŚŁņŚÉņä£ņØś ņØæļŗĄņØ┤ ļ¦żņÜ░ Ēü¼Ļ▓ī ļéśĒāĆļéśļŖö Ļ▓āņØä ĒÖĢņØĖ ĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļŖö ņŗ£ņäżņØś ņĀäĒøäļÅÖņÜöņŚÉ ņ׳ņ¢┤ņä£ ņĪ░ļźśļĪ£ ņØĖĒĢ£ ņśüĒ¢źņØ┤ Ēīīļ×æĒĢśņżæņØś ņןņŻ╝ĻĖ░ņä▒ļČäĻ│╝ ņ£Āņé¼ĒĢ£ ĒŖ╣ņä▒ņØä Ļ░Ćņ¦ĆĻ│Ā Ēīīļ×æĒĢśņżæņŚÉ ļ╣äĒĢ┤ ļŹö ņ¦Ćļ░░ņĀü ņØĖņ×Éņ×äņØä ļéśĒāĆļéĖļŗż. ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ļČĆļĀźņØś ņ”ØĻ░ĆņÖĆ Ļ│äļźś Ļ▓Įņé¼Ļ░üņØ┤ ņ×æņĢäņ¦ÉņŚÉ ļö░ļØ╝ ņØæļŗĄņØś Ēü¼ĻĖ░Ļ░Ć Ļ░ÉņåīĒĢśļŖö ĒŖ╣ņä▒ņØ┤ ļéśĒāĆļé£ļŗż.
4.5 ļĪ£Ēöä ņןļĀź ņŖżĒÄÖĒŖĖļ¤╝
Ļ│äļźśļĪ£ĒöäņØś ņŗ£Ļ│äņŚ┤ ņןļĀźņØæļŗĄņØä FFTļź╝ ĒåĄĒĢ┤ ņŖżĒÄÖĒŖĖļ¤╝ņ£╝ļĪ£ ļ│ĆĒÖśĒĢśņŚ¼ Fig. 12ņŚÉ ļÅäņŗ£ĒĢśņśĆļŗż. ļĪ£ĒöäņןļĀź ņŖżĒÄÖĒŖĖļ¤╝ņØś Ēö╝Ēü¼ ņŻ╝ĒīīņłśļŖö ņÜ┤ļÅÖņØæļŗĄ ņŖżĒÄÖĒŖĖļ¤╝Ļ│╝ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ Ēīīļ×æĒĢśņżæņØś Ēö╝Ēü¼ ņŻ╝ĒīīņłśņÖĆ ņØ╝ņ╣śĒĢ£ļŗż. ļĪ£ĒöäņןļĀź ņŖżĒÄÖĒŖĖļ¤╝ ņØæļŗĄņØś Ēü¼ĻĖ░ļŖö ļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝Ļ│╝ļŖö ļ░śļīĆļĪ£ ļČĆņØ┤ņØś ļČĆļĀźņØ┤ ņ”ØĻ░ĆņÖĆ Ļ│äļźśĻ▓Įņé¼Ļ░üņØ┤ ļé«ņĢäņ¦łņłśļĪØ ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖ ĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļŖö ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņŚÉ ņØśĒĢ£ Ļ│äļźśļĪ£ĒöäņØś ņןļĀźņØś ņ”ØĻ░ĆĻ░Ć ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś ļÅÖņÜöņØś Ļ░ÉņåīņŚÉ ņśüĒ¢źņØä ļ»Ėņ╣śĻ│Ā ņ׳ņØīņØä ņØśļ»ĖĒĢ£ļŗż.
Fig.┬Ā12
Spectral density of rope tension with respect to analysis configuration without considering the current
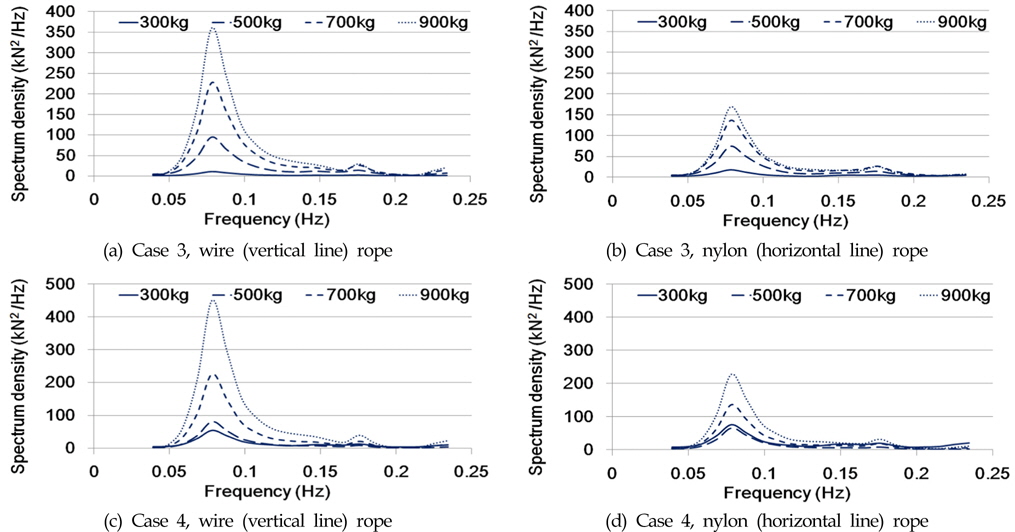
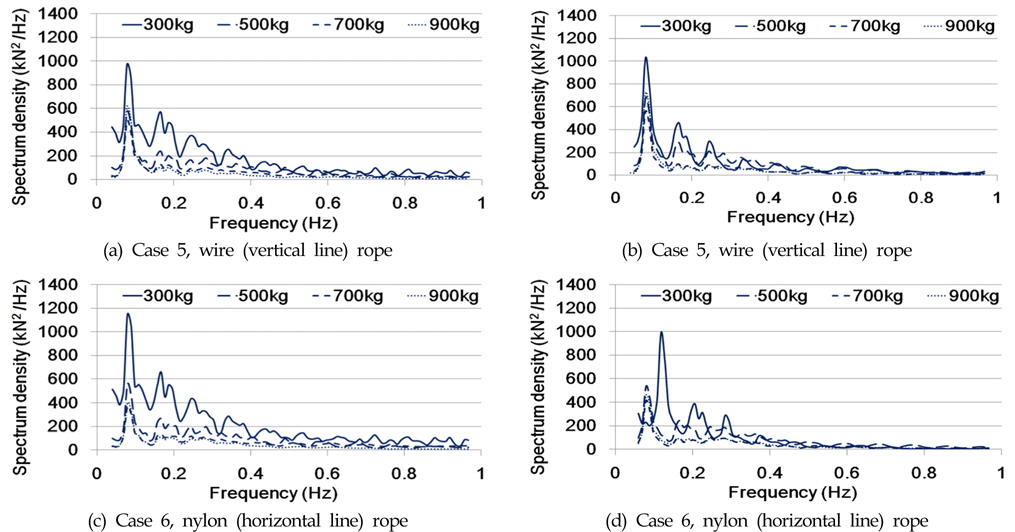
ļśÉĒĢ£, ņłśņ¦üĻ│äļźśļĪ£ĒöäņÖĆ ņłśĒÅēĻ│äļźśļĪ£ĒöäņØś ņןļĀźņØæļŗĄ ļ╣äĻĄÉ ņŗ£ ņłśņ¦ü Ļ│äļźśļĪ£ĒöäņØĖ ņÖĆņØ┤ņ¢┤ļĪ£ĒöäņØś ņןļĀź ņØæļŗĄņØ┤ ļŹö Ēü░ Ļ▓āņØä ļ│╝ ņłś ņ׳ļŗż. Fig. 13ņØĆ ņČöĻ░ĆņĀüņ£╝ļĪ£ ņĪ░ļźśĻ░Ć ņ×æņÜ®Ē¢łņØä ļĢīņØś ļĪ£ĒöäņןļĀź ņŖżĒÄÖĒŖĖļ¤╝ņØä ļéśĒāĆļéĖļŗż. Fig. 12ņØś Ēīīļ×æĒĢśņżæļ¦īņØ┤ ņĀüņÜ®ļÉśņŚłņØä Ļ▓ĮņÜ░ņÖĆļŖö ļŗ¼ļ”¼ ļŗżņłśņØś Ēö╝Ēü¼Ļ░Ć ļ░£ņāØĒĢśņśĆņ£╝ļ®░ ņĀĆņŻ╝ĒīīņłśņśüņŚŁņŚÉņä£ņØś ņØæļŗĄņØ┤ ņāüļīĆņĀüņ£╝ļĪ£ Ēü░ Ļ▓āņØä ļ│╝ ņłś ņ׳ļŗż. ņØ┤ļŖö Ēīīļ×æĒĢśņżæņØś ņןņŻ╝ĻĖ░ ņä▒ļČäĻ│╝ ņ£Āņé¼ĒĢ£ ĒŖ╣ņä▒ņØä Ļ░Ćņ¦ĆļŖö ņĪ░ļźśņŚÉ ņØśĒĢ┤ ņČöĻ░ĆņĀüņ£╝ļĪ£ ļ░£ņāØĒĢśļŖö ļÅÖņÜöņØś ņĀ£ņ¢┤ ļĢīļ¼ĖņØ┤ļØ╝ ĒīÉļŗ©ļÉśļ®░ ļČĆļĀźņØś ņ”ØĻ░ĆņŚÉ ņØśĒĢ┤ ņØæļŗĄņØś Ēü¼ĻĖ░Ļ░Ć Ļ░ÉņåīĒĢśļŖö Ļ▓ĮĒ¢źņØ┤ ļéśĒāĆļé£ļŗż.
5. Ļ▓░ ļĪĀ
ņÖĖĒĢ┤ ĒĢ┤ņĪ░ļźśņ¢æņŗØņŗ£ņäżņØś ļÅÖņĀüņØæļŗĄĒŖ╣ņä▒ņØä Ļ▓ĆĒåĀĒĢśĻĖ░ ņ£äĒĢ┤ ņłśņ╣ś ņŚ░ĻĄ¼ļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. Ļ│äļźśļ│ĆņłśņŚÉ ļö░ļźĖ ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś ļÅÖņĀü ĒŖ╣ņä▒ņØä ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢ┤ Ļ│äļźśļ│ĆņłśņŚÉ ļö░ļźĖ ņ╝ĆņØ┤ņŖż ĒĢ┤ņäØņØ┤ ņłśĒ¢ēļÉśņŚłņ£╝ļ®░ ĒÖśĻ▓ĮĒĢśņżæņØĆ Ēīīļ×æņŖżĒÄÖĒŖĖļ¤╝Ļ│╝ ņĪ░ļźśļź╝ ņĀüņÜ®ņŗ£ņ╝£ ņŗ£Ļ│äņŚ┤ ņØæļŗĄņØä ĒĢ┤ņäØĒĢśņśĆļŗż. ņ¢æņŗØņŗ£ņäżņØś ņāüĒĢśļÅÖņÜö, ņĀäĒøäļÅÖņÜö ļæÉ Ļ░Ćņ¦ĆņØś ņŗ£ Ļ│äņŚ┤ ņØæļŗĄĻ│╝ Ļ│äļźśļĪ£ĒöäņØś ņŗ£Ļ│äņŚ┤ ņןļĀźņØæļŗĄņØä ņŖżĒÄÖĒŖĖļ¤╝ņ£╝ļĪ£ ļ│ĆĒÖśĒĢśņŚ¼ ļ╣äĻĄÉĒĢśņśĆĻ│Ā ļŗżņØīĻ│╝ Ļ░ÖņØĆ Ļ▓░ļĪĀņØä ļÅäņČ£ĒĢśņśĆļŗż.
(1) ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ļČĆņØ┤ņØś ļČĆļĀźĻ│╝ Ļ│äļźśĻ▓Įņé¼Ļ░üņŚÉ ņØśĒĢ┤ Ļ│äļźśļĪ£ĒöäņØś ņ┤łĻĖ░ņןļĀźņØä Ļ▓░ņĀĢĒĢĀ ņłś ņ׳ņŚłļŗż. ņ┤łĻĖ░ņןļĀźņØ┤ ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ņ¢æņŗØņŗ£ņäżņØś ņĀäĒøäļÅÖņÜöĻ░Ć Ļ░ÉņåīĒĢśļŖö Ļ▓ĮĒ¢źņØ┤ ļéśĒāĆļé¼ņ£╝ļ®░ ņāüĒĢśļÅÖņÜöņØś Ļ▓ĮņÜ░ ļ¬©ļōĀ Ļ▓ĮņÜ░ņŚÉņä£ ņ£Āņé¼ĒĢ£ ņØæļŗĄņØ┤ ļéśĒāĆļé¼ļŗż.
(2) Ēīīļ×æņŖżĒÄÖĒŖĖļ¤╝ņŚÉ ļīĆĒĢ£ ĒĢ┤ņĪ░ļźś ņ¢æņŗØņŗ£ņäżņØś ņŗ£Ļ│äņŚ┤ ļÅÖņÜöļź╝ Ļ│äņé░ĒĢśņŚ¼ ņŖżĒÄÖĒŖĖļ¤╝ņ£╝ļĪ£ ļ│ĆĒÖśĒĢśņŚ¼ ļ╣äĻĄÉĒĢśņśĆļŗż. ļÅÖņÜö ņŖżĒÄÖĒŖĖļ¤╝ ļČäņäØ Ļ▓░Ļ│╝, ņ¢æņŗØņŗ£ņäżņØś ļÅÖņÜöļŖö ņןņŻ╝ĻĖ░ņä▒ ĒĢśņżæņŚÉ ņ¦Ćļ░░ņĀüņØ┤ņŚłņ£╝ļ®░ ņĀäĒøäļÅÖņÜöņØś Ļ▓ĮņÜ░ ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņØś Ļ│äļźśļ│ĆņłśņØĖ ļČĆņØ┤ņØś ļČĆļĀźĻ│╝ Ļ│äļźśĻ▓Įņé¼Ļ░üņŚÉ ņØśĒĢ┤ ļÅÖņÜöņØś ņĀ£ņ¢┤Ļ░Ć Ļ░ĆļŖźĒĢśņśĆļŗż. ļ░śļ®┤ ņāüĒĢśļÅÖņÜöņØś Ļ▓ĮņÜ░ ļ¬©ļōĀ Ļ│äļźśļ│ĆņłśņŚÉņä£ ņ£Āņé¼ĒĢ£ ņØæļŗĄņØ┤ ļéśĒāĆļé¼ņ£╝ļ®░ ņØ┤ļŖö ņĀäĒøäļÅÖņÜöļ¬©ļō£ņÖĆļŖö ļŗ¼ļ”¼ ņāüĒĢśļÅÖņÜöļ¬©ļō£ļŖö ņ£ĀņŚ░ļČĆņØ┤ Ļ│äļźśņŗ£ņŖżĒģ£ņŚÉ ņśüĒ¢źņØä ļ░øņ¦Ć ņĢŖĻ│Ā ļÅģļ”ĮņĀüņ×äņØä ņØśļ»ĖĒĢ£ļŗż.
(3) Ļ│äļźśļĪ£ĒöäņØś ņŗ£Ļ│äņŚ┤ ņןļĀźņØæļŗĄĻ│╝ ļĪ£ĒöäņןļĀź ņŖżĒÄÖĒŖĖļ¤╝ņØä ĒåĄĒĢ┤ Ļ│äļźśļ│ĆņłśņÖĆ ĒĢśņżæņĪ░Ļ▒┤ņŚÉ ņØśĒĢ£ Ļ│äļźśļĪ£ĒöäņØś ļÅÖņĀüĒŖ╣ņä▒ņØä ņŗØļ│äĒĢśņśĆļŗż. ļĪ£ĒöäņØś ņןļĀź ņŖżĒÄÖĒŖĖļ¤╝ ļśÉĒĢ£ ņĀĆņŻ╝ĒīīņłśņśüņŚŁņŚÉņä£ņØś ņØæļŗĄņŚÉ ņ¦Ćļ░░ņĀüņØ┤ļŗż. ņØ┤ļŖö ĒĢśņżæņØś ņĀĆņŻ╝Ēīīņłś ņä▒ļČäņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢśļŖö ļÅÖņÜöņØś ņĀ£ņ¢┤ņŚÉ ĻĖ░ņØĖĒĢśļ®░ ņ┤łĻĖ░ņןļĀźņØ┤ ņ”ØĻ░ĆĒĢĀņłśļĪØ ņØæļŗĄņØĆ Ēü¼Ļ▓ī ļéśĒāĆļé£ļŗż. ņĪ░ļźśņØś Ļ│ĀļĀż ņŗ£ ĻĘĖļĀćņ¦Ć ņĢŖņØĆ Ļ▓ĮņÜ░ņŚÉ ļ╣äĒĢśņŚ¼ ņāüļīĆņĀüņ£╝ļĪ£ ļÅÖņÜöĻ░Ć Ēü¼Ļ▓ī ļ░£ņāØĒĢśļ®░ ļĪ£Ēöä ņŖżĒÄÖĒŖĖļ¤╝ ņØæļŗĄņØś Ēü¼ĻĖ░ ņŚŁņŗ£ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ņ”ØĻ░ĆĒĢ£ļŗż. ļśÉĒĢ£, ļ¦ÄņØĆ ņłśņØś Ēö╝Ēü¼Ļ░Ć ļ░£ņāØĒĢśļ®░ Ļ│äļźśļ│ĆņłśņŚÉ ņØśĒĢ£ ļÅÖņÜöņØś Ļ░ÉņåīņŚÉ Ēö╝Ēü¼ ļ░£ņāØ ņłśņÖĆ ĻĘĖ ņØæļŗĄņØś Ēü¼ĻĖ░Ļ░Ć ņżäņ¢┤ļō£ļŖö ĒŖ╣ņä▒ņØ┤ ļéśĒāĆļé¼ļŗż.




