국내 연안 카페리 차량 고박 장치 안전성에 관한 연구: 제2부 가속도 예측 방법에 따른 고박 안전도 비교 연구
Study on Structural Safety of Car Securing Equipment of Coastal Carferry: Part II Assessment of Lashing Safety according to Acceleration Prediction Approaches
Article information
Abstract
For a carferry with a displacement of 1,633 tonf, a seakeeping analysis-based direct load approach (DLA) was used in Part I of these series, where the final deliverable was the long-term probabilistic acceleration components. In Part II of these series, the tangential acceleration components are explained based on two approaches: a standard called the IMO CSS code and simple formulas with the probable maximum roll and pitch rotations. The subsequent tangential acceleration-induced external force components are also introduced for these two approaches. The lashing strength components were selected from the IMO CSS code. It was assumed that two different vehicles (a car and a truck) were stowed at the most distant locations on the main deck to assume the largest tangential acceleration components and were secured with four steel wires with longitudinal and transverse lashing angles of 45°. Four cases were considered, with different methods for predicting the acceleration components and different tools for the external loads and lashing strengths involved: cases Rule-LS (rule-based maximum probable roll and pitch angles for predicting the acceleration components in conjunction with LashingSafety), DLA-LS (seakeeping-based long-term acceleration components with LashingSafety), CSS-LC (IMO CSS code-based acceleration components using LashCon), and CSS-LS (IMO CSS code-based acceleration components using LashingSafety). In terms of the acceleration and external force components, the CSS-LC and CSS-LS results are more than two times the results of Rule-LS. Thus, when the external forces and lashing strengths are evaluated using CSS-LC and CSS-LS, the truck needs more lashing wires, while Rule-LS and DLA-LS predict that the present lashing configuration is on the safe side.
1. 서 론
본 논문의 제1부에서는 1,633톤급 국내 연안 카페리를 대상 호선으로 결정한 후, 항행 루트 분석을 통한 장기 해상 상태의 수집과 이를 적용한 직접 하중 계산(DLA, Direct load approach)을 통하여 본 호선이 경험하는 장기 가속도 성분을 추정하는 과정에 대하여 설명하였다. 비교적 높은 확률을 가지는 해상 상태를 11개 선정하였으며, 22.5도의 간격을 가지는 파향은 선박과 균일 조우 확률을 가진다고 가정하였다. 주파수 응답 해석을 위한 주파수 선정 과정을 설명하였으며, 2.5%의 비교적 작은 횡 동요 감쇠비를 적용하여 주파수 응답 해석을 실시하였다. 198회에 걸친 1시간 시간 응답 해석을 실시하였지만, 초기 불안정성을 제거하기 위하여 3,500초의 해석 시간에 대하여만 장기 가속도 산정에 사용하였다. 운동 성분의 시간 응답 분석으로부터 얻어진 운동 스펙트럼과 주파수 응답 해석에서 얻어진 운동 RAO(Response amplitude operator)의 비교를 통하여 시간 응답 해석의 정량성을 확인할 수 있었다. 최종적으로 가속도 성분의 시간 응답에 대한 파정/파저 집계법과 파정/파저의 확률밀도함수 분석을 통하여 장기 가속도를 추정할 수 있었다.
제2부에서는 다양한 가속도 추정 방법에 따른 고박 장치에 작용하는 외력을 비교 평가할 것이다. 제1편에서 도출한 DLA 기반의 가속도뿐만 아니라, IMO CSS(2011)에서 제시하는 가속도와 선급 규칙 등에서 요구하는 횡 동요각 및 종 동요각을 이용하여 가속도를 분석할 것이다. 힘의 평형에 기반한 고박 강도를 소개하고, IMO CSS에 기반한 고박 강도를 소개하고자 한다. 고박 장치에 작용하는 외력과 고박 강도를 추정하기 위하여 LashCon(DNV, 2003) 및 LashingSafety(Jo et al., 2016)를 사용하여 그 결과를 비교 분석하고자 한다.
2. 고박 안전도 평가
화물을 고정하기 위하여 사용된 고박 장치의 안전도는 고박 장치의 고박력과 화물에 작용하는 외력(관성력)을 비교하는 간단한 과정이다. 즉, 식 (1)-(3)은 외력(좌항)과 고박 강도(우항)의 비교를 나타내며, Fx , Fy , Mx 는 각각 선체 길이 방향 외력, 선체 수평 방향 외력, 선체 길이 방향 축에 관한 전도 모멘트를 나타낸다. 반면 Fcx , Fcy , Mcx 는 각각의 외력에 대응하는 고박장치의 고박 강도를 의미한다.



2.1 고박 장치에 작용하는 외력
2.1.1 IMO CSS에 기반한 외력 산정
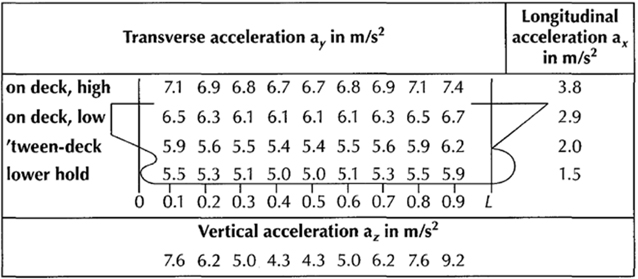
IMO CSS(2011)는 종 동요 가속도 및 횡 동요 가속도에 기인한 관성력의 길이 방향 성분(Fx)과 수평 방향 성분(Fy)에 풍압(Wind pressure, pw )과 청수(Green water)에 기인한 슬로싱압(Sea sloshing pressure, ps )을 더하여 식 (4) 및 식 (5)와 같은 외력을 사용한다. 여기서 Cx, Cy, Cz 는 각각 화물의 종 방향, 횡방향, 수직 방향 크기이다(Fig. 3 참조). 관성력의 수직 방향 성분(Fz )는 식 (6)과 같다. 식 (4) 및 식 (5)에서 가속도 성분 ax, ay은 중력 가속도를 이미 포함하고 있지만, 식 (6)에서 az 는 중력 가속도 성분을 포함하고 있지 않다. ax, ay, az는 각각 접선 가속도의 길이, 수평, 수직 방향 성분을 의미하며, Fig. 1에 나타낸 화물의 공간상 적재 위치에 따른 표로부터 가속도를 얻는다. 또한 fVL 은 선박의 속도 및 선장에 따른 수정 계수로서 식 (7)과 같이 제시된다. 여기서 V 및 LBP는 선속 및 수선간 선장을 의미한다. fBGM은 선폭(B)과 메타센터 높이(GM)와의 비(B/GM)에 의하여 결정되는 수정 계수이다. 대양을 항해하는 비교적 큰 규모의 선박은 통상 B/GM이 13을 초과하여 계수가 1.0의 값을 가지지만, B/GM이 13미만일 경우 Table 1을 이용하여 계수를 추정할 수 있다. 관성력의 수평 방향 성분(Fy)은 전도점(Tipping point)에 관하여 모멘트(Mx)를 유발하며, 이를 (8)에 나타내었다. 여기서 Gcz 는 화물의 지지점으로부터 화물의 질량 중심( Gc)까지의 수직 길이를 의미한다.
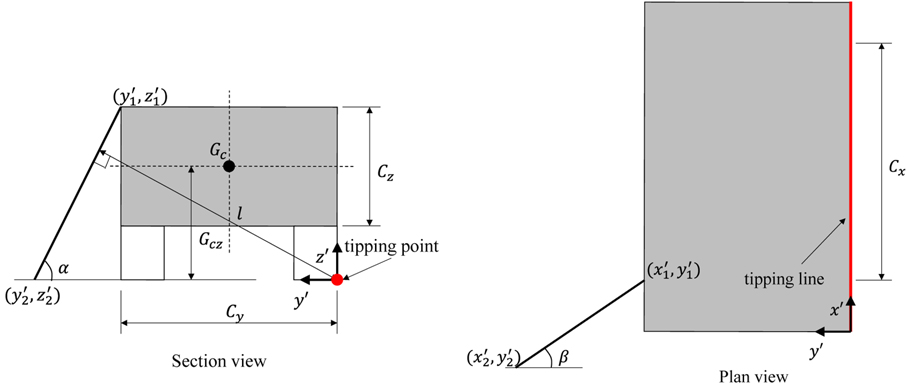
Geometry of a cargo lashing






2.1.2 힘의 평형에 기반한 외력 산정
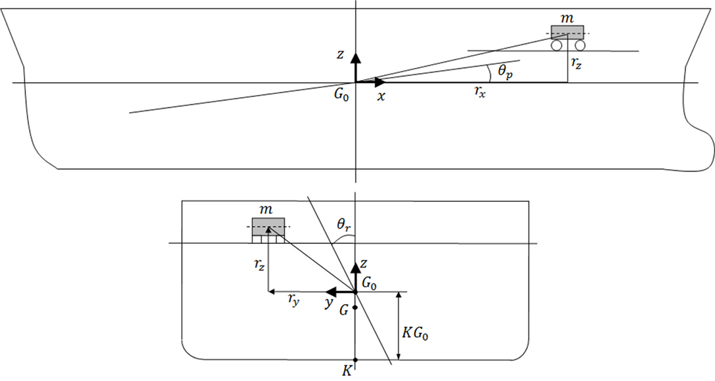
Fig. 2와 같이 선체의 횡 동요와 종 동요의 회전 중심 G0로부터  만큼 떨어진 위치에 질량이 m인 화물을 고려한다. 여기서
만큼 떨어진 위치에 질량이 m인 화물을 고려한다. 여기서  ,
,  ,
,  는 직교 좌표계(x, y, z)에 관한 거리 벡터 의 성분을 의미한다. 외력 성분은 방향성이 존재하기 때문에 거리를 벡터로 표현하는 것이 타당하지만, 외력의 크기를 고박 강도와 비교하는 개념이므로 외력 성분의 방향성은 중요하지 않다. 따라서 거리 벡터를 길이로 간주하여도 무방하다. 종 동요 및 횡 동요로 인하여 이 화물에 작용하는 접선 가속도와 중력 가속도를 고려하여 직교 좌표 방향에 작용하는 힘(관성력)의 성분(Fx, Fy, Fz)은 각각 식 (9)-(11)과 같다. 여기서 θp , Tp 는 각각 종 동요 각도와 주기를, θr , Tr 는 각각 횡 동요 각도와 주기를 의미한다. 또한 apx 와 apz는 각각 종 동요로 인한 길이 방향 및 수직 방향 접선 가속도, ary 와 arz는 횡 동요로 인한 수평 방향 및 수직 방향 접선 가속도를 의미한다. 또한 g는 중력 가속도, Gx, Gy는 각각 중력 가속도의 성분(횡 동요 및 종 동요 후 자중 성분)이다. Fry , Frz는 횡 동요로 인한 수평 방향 및 수직 방향 관성력, Fpx, Fpz 는 종 동요로 인한 길이 방향 및 수직 방향 관성력이다. 식 (11)에서 수직 방향 외력에는 상하 동요로 인한 가속도가 고려되어야 하나, 본 연구에서는 이를 미소하다고 가정하여 이를 포함하지 않았다.
는 직교 좌표계(x, y, z)에 관한 거리 벡터 의 성분을 의미한다. 외력 성분은 방향성이 존재하기 때문에 거리를 벡터로 표현하는 것이 타당하지만, 외력의 크기를 고박 강도와 비교하는 개념이므로 외력 성분의 방향성은 중요하지 않다. 따라서 거리 벡터를 길이로 간주하여도 무방하다. 종 동요 및 횡 동요로 인하여 이 화물에 작용하는 접선 가속도와 중력 가속도를 고려하여 직교 좌표 방향에 작용하는 힘(관성력)의 성분(Fx, Fy, Fz)은 각각 식 (9)-(11)과 같다. 여기서 θp , Tp 는 각각 종 동요 각도와 주기를, θr , Tr 는 각각 횡 동요 각도와 주기를 의미한다. 또한 apx 와 apz는 각각 종 동요로 인한 길이 방향 및 수직 방향 접선 가속도, ary 와 arz는 횡 동요로 인한 수평 방향 및 수직 방향 접선 가속도를 의미한다. 또한 g는 중력 가속도, Gx, Gy는 각각 중력 가속도의 성분(횡 동요 및 종 동요 후 자중 성분)이다. Fry , Frz는 횡 동요로 인한 수평 방향 및 수직 방향 관성력, Fpx, Fpz 는 종 동요로 인한 길이 방향 및 수직 방향 관성력이다. 식 (11)에서 수직 방향 외력에는 상하 동요로 인한 가속도가 고려되어야 하나, 본 연구에서는 이를 미소하다고 가정하여 이를 포함하지 않았다.
A cargo located at bow and port sides on a ship
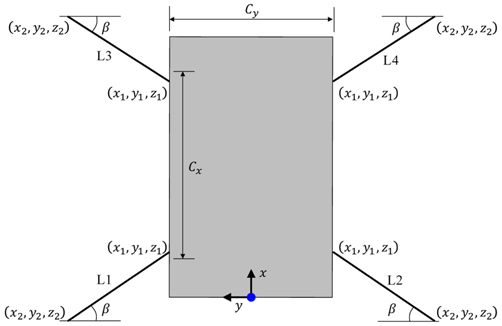
Fig. 3에서 화물의 종 방향, 횡 방향, 수직 방향 크기를 각각 Cx, Cy, Cz 라고 정의한다. 단, Cx 와 Cy 는 화물의 실제 크기가 아니라 전도를 산정하기 위한 치수이며, 화물이 차량이라고 가정하면, 차량의 종 방향 축거(Wheel base)가 Cx , 횡 방향 윤거(Tread)가 Cy 이다. 전도 모멘트(Mx)는 식 (8)을 사용한다.



2.2 고박 강도
Fig. 3은 1개의 와이어에 의하여 고박된 차량을 도식화한 것이다. 고박 장치는 단면도 및 평면도에서 화물 지지면과 α(횡 방향 고박 각도)와 β(종 방향 고박 각도)의 각도를 이루고 있다. 고박 인장력을 T라고 할 때 종 방향 및 횡 방향 고박 강도는 식 (12)-(13)과 같다. 전도 중심점부터 고박 장치가 만들어내는 인장력 벡터와의 수직 거리를 전도 모멘트 암(Arm, l)이라고 할 때 전도 고박 강도를 식 (14)와 같이 제시하였다. IMO CSS (2011)은 0.9의 안전율을 제공하고 있으며, 고박 장치가 π/4이상일 경우에만 전도 고박 강도로 인정되도록 규정하고 있다.
선원이 실제로 적용하는 고박 장치 인장력과 개수로부터 고박 강도를 산정해야 하지만, 고박 장치의 공칭 인장 강도와 개수를 통상 화물의 중량에 따라 결정하는 것이 현실이다. 고박 장치의 공칭 인장 강도는 통상 최소 파단 하중(MBL, Minimum breaking load)이나 최대 고박 인장력(MSL, Maximum securing load)를 의미한다. IMO CSS(2011)에 의하면 고박 장치 인장력 T를 식 (15)에 따라 결정할 것을 명시한다. 즉 MSL에 안전 계수 1.35를 적용하여 고박 인장력을 결정해야 한다. 또한 MSL은 MBL로부터 결정될 수 있으며, 고박 장치의 종류별 MBL을 식 (16)에 나타내었다.





3. 고박 안전도 벤치마크 연구
3.1 차량 종류에 따른 고박 시나리오
본 논문 제1편에서 정의된 두 가지 종류 차량(25톤 트럭(Truck)과 0.91톤 승용차(Car))가 선체 중심선으로부터 선측 방향 최 외측에 배치될 경우에 대하여 가속도, 고박 외력, 고박 강도, 고박 안전도를 비교 평가 하고자 한다. 이를 위하여 승용차와 트럭의 기본 제원과 고박 위치를 요약하여 Table 2에 나타내었다.
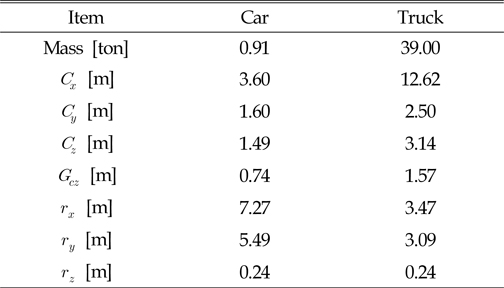
Masses, locations, and sizes of two vehicles
차량의 고박 위치를 표현하기 위하여 Fig. 4와 같이 4개의 고박 장치를 이용한 고박 플랜을 작성하였다. 또한 공간상의 고박 위치와 고박 각도를 정리하여 Table 3에 나타내었다. 이때 차량의 최 후미에 Fig. 4와 같은 국부 좌표계를 설정하였다. x, y, z는 이 국부 좌표계에 관한 위치를 나타내며, 하첨자 1과 2는 각각 차량 고박점과 선체 고박점을 의미한다. 고박 장치는 강철 와이어로 가정하였으며, MSL을 110kN으로 가정하였다.
A sketch of car lashing plan

A table of each lashing location based on vehicle local coordinate.
3.2 고박 장치에 작용하는 외력 비교
힘의 평형에 기반한 외력 산정을 위하여 동요 각도 및 동요 주기의 결정이 필요하다. 즉 식 (9)-(11)의 θr , θp , Tr , Tp의 결정이 필요하다. 일본 국토 교통성(MLIT, 2015)에 따르면 실측치가 없을 경우 로로선의 Tr과 Tp는 식 (17)과 식 (18)를 따른다고 명시되어 있다. 연근해 항행 조건(Short sea going)을 고려하여 횡 동요각 θr=25° 및 종 동요각 θp=5°를 가정하여 Tr과 Tp를 산정하였다(KR, 2016).


이렇게 결정된 4개의 변수(θr , θp , Tr , Tp)를 식 (9)-(11) 및 식 (8)에 대입하여 가속도 성분과 외력 성분을 계산하였으며, 선급 규칙에 제시된 횡 동요각 및 종 동요각을 사용하였으므로 Rule-LS 케이스라 명명하여 Table 4에 나타내었다. 여기서 LS는 LashingSafety의 약어이며, 본 계산을 위하여 LashingSafety(Jo et al., 2016)을 사용하였음을 의미한다. 또한 본 논문의 제1편에서 DLA를 통하여 얻은 만재 출항 조건 운동 가속도를 접선 가속도로 변환하여 외력을 산정하였다. 이를 LDA-LS 케이스라 명명하였다. LDA-LS 케이스에서는 횡 동요각 및 종 동요각을 식 (9) 및 식 (10)의 Fpx 및 Fry를 이용하여 다시 추정하였다. 마지막으로 IMO CSS 가속도를 사용하여 CSS-LC 케이스 및 CSS-LS 케이스를 비교하였다. 여기서 각각 케이스는 LashCon(DNV, 2003)과 LashingSafety(Jo et al., 2016)를 사용하여 계산되었다. IMO CSS 가속도 계산시 승용차와 트럭의 길이 방향 위치는 각각 “0.4L” 및 “0.6L”, 수직 방향 위치는 “Tween deck”으로 가정하였다(Fig. 1 참조). LashCon(DNV, 2003)은 IMO CSS에 기반하여 노르웨이 선급에서 개발하여 무료 배포하는 엑셀 매크로이다.
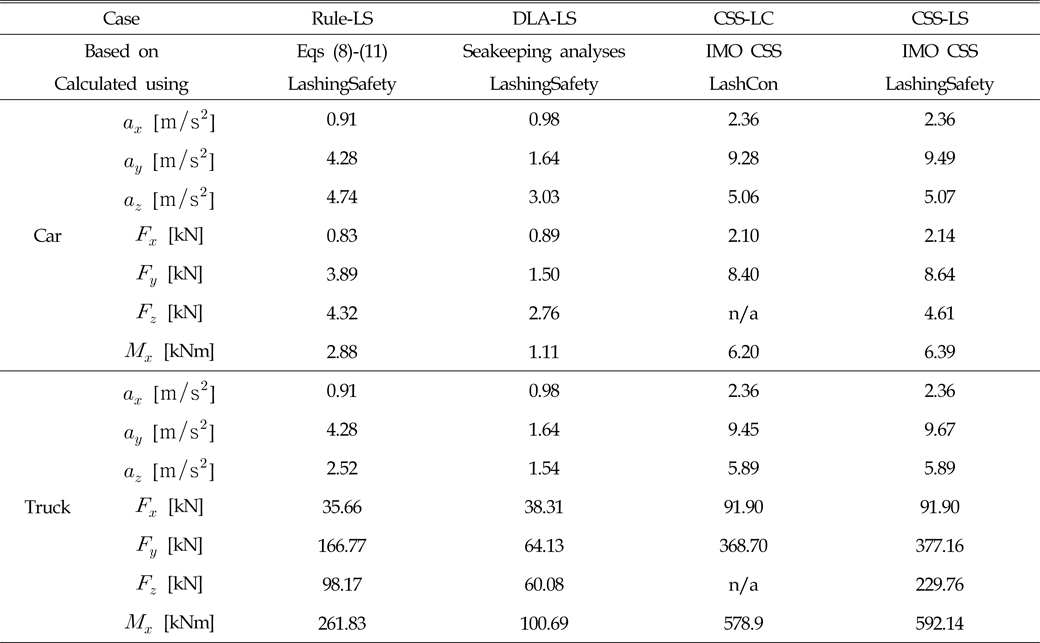
Comparison of acceleration and resulting external force components
선급 규칙에 기반하여 가속도를 추정한 케이스(Rule-LS)의 외력 성분은 DLA 결과(DLA-LS)와 비교적 큰 차이를 나타내고 있음을 확인할 수 있다. 이는 본 논문의 제1편에서 얻은 회전 가속도를 이용하여 종 동요각 및 횡 동요각을 재산정했기 때문이다. 재산정한 횡 동요각 및 종 동요각은 각각 9.4도와 5.4도로서 선급 규칙에서 제공하는 25도의 횡 동요각과는 큰 차이를 보였다.
Rule-LS 케이스 또는 DLA-LS 케이스의 종 방향, 횡 방향, 수직 방향 가속도 성분은 IMO CSS에 기반한 케이스(CSS-LC 또는 CSS-LS) 결과에 비하여 상당히 작음을 확인할 수 있다. IMO CSS가 가속도를 대략 2배 이상 크게 예측하고 있음을 확인할 수 있다. 이러한 가속도의 보수성은 3가지 외력 성분을 비례적으로 크게 산정함을 확인할 수 있다.
LashingSafety는 IMO CSS에 기반한 횡 가속도 산정시 정확한 fBGM 을 추정하기 위하여 Fig. 6와 같이 다항식 추세선을 사용하기 때문에 LashCon의 결과와 약간의 차이가 있는 것으로 추정된다. 따라서 Fy 및 Mx도 비례적으로 차이가 있음을 확인할 수 있다.
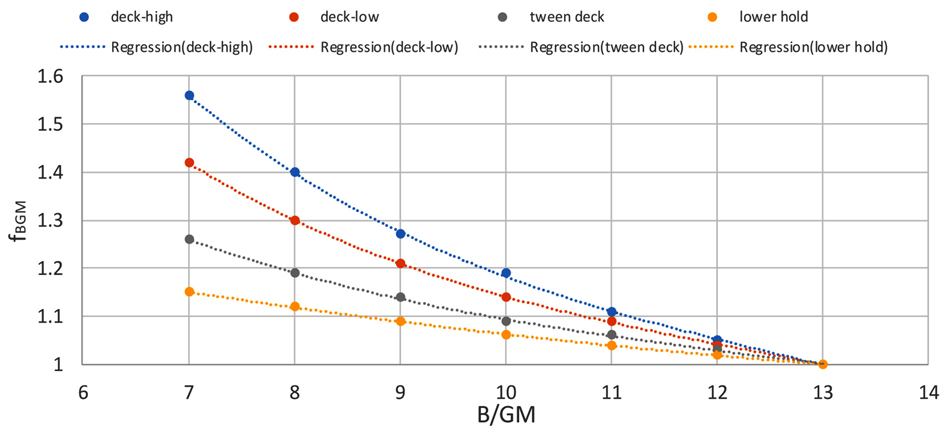
Regression results for fBGM interpolation
3.3 고박 장치 강도 및 안전도 비교
Table 5는 4개 케이스에 대한 고박 강도를 정리하여 나타낸 표이다. 고박 장치의 인장력을 110kN, 마찰 계수를 0.3으로 가정하였다. 모든 케이스에서 고박 강도는 큰 차이가 없다. 사실 Table 4와 Table 5에 제시된 케이스는 가속도 산정 방법에 따른 분류이므로, 고박 강도는 가속도 산정 방법에 관계없이 동일하게 산정되어야 한다. 단 식 (12)에 보인바와 같이 수직 외력 Fz가 포함되는 종 방향 고박 강도의 경우 케이스 간에 약간의 차이가 발생하였음을 확인할 수 있다.
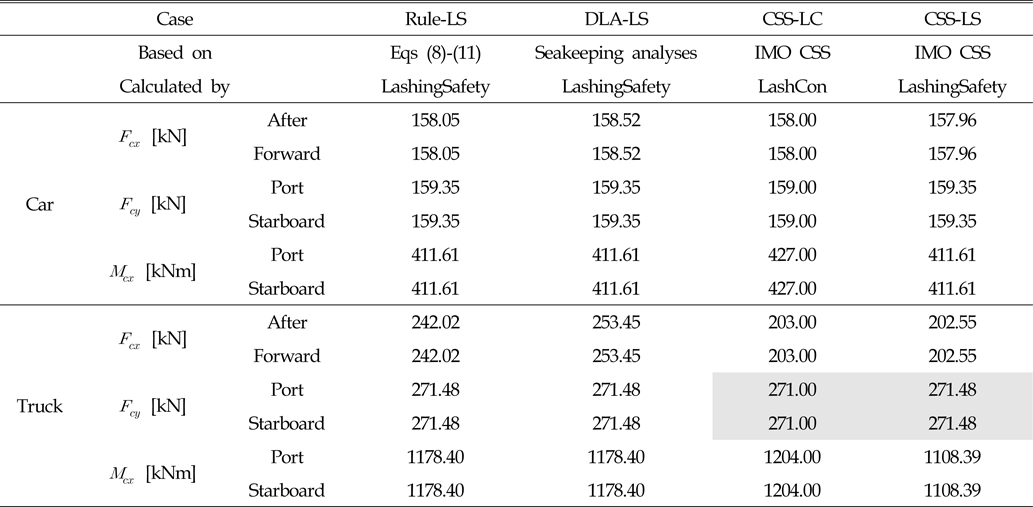
Comparison of lashing strengths
CSS-LC와 CSS-LS의 고박 강도는 차이가 전혀 없어야 하지만, Mcx가 비교적 유의미한 차이를 보이고 있다. LashCon의 경우 모멘트 암의 산정시 오류를 포함할 가능성이 크다. 모멘트 암을 산정하기 위해서는 고박 각도 α 및 β가 사용되는데, Fig. 7에 나타낸 바와 같이 횡 방향 고박 각도를 α1로 오인하는 경우가 종종 발견된다(IMO, 2011; KR, 2016). 역학적으로 횡 방향 고박 각도는 투영면에서 정의되어야 하므로 당연히 횡 방향 고박 각도는 α2 가 된다. 종 방향 고박 각도 β가 크다면 α1 은 α2와 큰 차이를 보일수 있으며, 모멘트 암의 산정 오류도 커지게 된다.

Definition of vehicle securing angles
Table 4와 Table 5를 비교하여 고박 강도가 작용 외력에 비하여 작다면 고박 안전도를 만족하지 못하는 것으로 간주되며, 이를 Table 5에 음영으로 나타내었다. 고박 장치의 개수 증가, 고박 인장력 증가, 또는 고박 장치 MBL 증가 등의 조치가 필요하다.
4. 결 론
만재 배수량 1,633톤급 연안 카페리에 0.9톤급 자동차 및 39톤급 트럭이 심각한 접선 가속도를 경험하도록 횡 방향 및 종 방향 최외곽에 배치된 상황을 가정하여, 차량에 작용하는 가속도와 외력을 평가하였다. 본 논문의 제1부에서 내항성 해석을 통하여 도출한 만재 출항 조건의 회전 가속도로부터 횡 동요 각도 및 종 동요 각도를 추정하고 이를 이용하여 접선 가속도와 외력를 도출하였다. 이를 DLA-LS 케이스라 명명하였다. 두번째 선급 규칙에 명시된 25도 및 5도 횡 동요각 및 종 동요각을 가정 고려하여 접선 가속도와 외력을 추정하였으며, 이를 Rule-LS 케이스라 정의하였다. 세 번째 IMO CSS에 정의된 접선 가속도에 기반한 외력을 두가지 다른 프로그램(LashCon 및 LashingSafety)을 이용하여 도출하였다. 이를 각각 CCS-LC 및 CCS-LS 케이스라 정의하였다. 가속도 측면에서 Rule-LS는 DLA-LS와 큰 차이를 보이지 않았다. 단 DLA-LS 케이스에서 추정한 횡 동요각이 9.4도여서 25도와는 큰 차이를 보였으며, 따라서 횡 방향 접선 가속도와 횡 방향 외력에서 큰 차이가 있었다. 가속도 측면에서 Rule-LS는 CCS-LC 및 CCS-LS 케이스 결과와는 큰 차이를 나타냈으며, IMO CCS는 대양을 항해하는 선박에 대한 가속도를 사용하기 때문으로 2배 정도 큰 가속도가 예측되었다. CCS-LC 케이스의 횡 방향 가속도는 CCS-LS 케이스의 횡 방향 가속도와 비교적 의미있는 차이를 보였으며, 이는 fBGM 적용 방법의 차이에 기인하는 것으로 추정되었다. 따라서 화물에 작용하는 가속도 또는 외력 추정을 위하여 본 연구를 통하여 다음과 같은 잠정적인 결론을 추론할 수 있다. 연안을 항행하는 여객선의 경우 IMO CSS에 기반한 외력 추정보다는 선급 규칙에서 제공하는 최대 종 동요 주기나 최대 횡 동요 주기를 이용하여 가속도와 외력을 추정하는 것이 바람직하다. 또한 항행 해역의 해상 상태를 반영할 수 있다면, DLA를 이용하는 것도 가속도 또는 외력의 추정의 정확성을 향상시킬 수 있는 방법이라 판단된다.
강철 와이어 4개가 차량을 고박하는 상황에 대하여 4가지 케이스에 대한 고박 강도를 검토하였다. 4가지 케이스는 동일한 고박 강도 공식을 준용하기 때문에 거의 동일한 강도가 계산되었다. 단, 종 방향 고박 강도의 경우 수직 방향 외력을 사용하기 때문에 케이스 별로 약간의 차이를 보였다. 가정된 고박 상황에 대한 고박 안전도를 평가한 결과 IMO CSS에 기반한 가속도를 사용할 경우 고박 강도가 고박 외력에 비하여 작아서 추가적인 고박이 요구되었지만, Rule-LS 및 DLA-LS 케이스의 경우 현재 상태로도 충분한 고박 강도를 유지할 수 있음을 확인하였다.
본 연구에서는 DLA를 통하여 도출한 가속도의 장기 분포로 부터 극한 가속도를 도출하였지만, 횡 동요 및 종 동요 각도에 대하 통계 분석을 통하여 극한 가속도를 도출하여 비교할 필요가 있을 것으로 사료된다. 또한 수직 방향 외력의 산정시 상하 동요에 의한 가속도 성분을 포함하여 외력을 산정하는 것이 좀 더 합리적일 것으로 사료된다. 향후 다양한 선박에 대한 DLA를 통하여 연안 여객선에 적합한 극한 가속도를 제시할 필요가 있을 것으로 사료된다.
Notes
It is noted that this paper is revised edition based on proceedings of KAOST 2016 in Busan.
Acknowledgements
본 논문은 선박안전기술공단의 연구비 지원으로 수행되었음을 알립니다. 또한 산업통상자원부와 한국산업기술진흥원의 “한-영 해양플랜트 글로벌 전문인력양성사업”의 지원에 감사드립니다.
References
International Maritime Organization(IMO), 2011. Code of Safe Practice for Cargo Stowage and Securing.
Code of Safe Practice for Cargo Stowage and Securing 2011.Jo, H., Choung, J., Lee, K., 2016. Force Equilibrium-Based Safety Assessment System for Cargo Securing of Car Ferries. Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece.
Jo H., Choung J., Lee K.. Force Equilibrium-Based Safety Assessment System for Cargo Securing of Car Ferries In : Proceedings of the 26th International Ocean and Polar Engineering Conference; Rhodes, Greece; 2016.Ministry of Land, Infrastructure, Transport and Tourism (MLIT), 2015. On Cargo Securig of Ocean-Going RORO ships(in Japanese). [Online] Available at: <http://www.mlit.go.jp/common/000147418.pdf> [Accessed March 2015].
On Cargo Securig of Ocean-Going RORO ships 2015. [Online] Available at: <http://www.mlit.go.jp/common/000147418.pdf>. [Accessed March 2015].Det Norske Veritas(DNV), 2003. LASHCON IMO User Guide. [Online] Available at: <http://www.dnv.com> [Accessed September 2015].
LASHCON IMO User Guide 2003. [Online] Available at: <http://www.dnv.com>. [Accessed September 2015].Korea Register of Shipping(KR), 2016. Rules for the Classification of Steel Ships Part 7 Ships of Special Service. [Online] Available at: <http://krsusa.cloudapp.net/Files/KRRules/KRRules2016/KRRulesE.html> [Accessed September 2016].
Rules for the Classification of Steel Ships Part 7 Ships of Special Service 2016. [Online] Available at: <http://krsusa.cloudapp.net/Files/KRRules/KRRules2016/KRRulesE.html>. [Accessed September 2016].