


1. ņä£ ļĪĀ
ņ×ÉņøÉĻ│ĀĻ░łļĪ£ ņØĖĒĢ£ ņøÉņ×Éņ×¼ Ļ░ĆĻ▓® ņāüņŖ╣ņØ┤ ņÜ░ļĀżļÉśļŖö ņāüĒÖ®ņŚÉņä£ ņłśņŗ¼ 5,000ļ»ĖĒä░ņØś ņŗ¼ĒĢ┤ ņŚ░ņĢĮņ¦Ćļ░śņŚÉ ņĪ┤ņ×¼ĒĢśļŖö ļ¦ØĻ░ä ļŗ©Ļ┤┤ļŖö ļ¦żņÜ░ Ēü░ Ļ▓ĮņĀ£ņä▒ņØä ņ¦ĆļŗłĻ│Ā ņ׳ļŗż(Hong, 2010a; Chi and Hong, 2014). ĻĄŁļé┤ņŚÉņä£ļŖö 94ļģäļČĆĒä░ ņŗ¼ĒĢ┤ņĀĆ Ļ┤æļ¼╝ņ×ÉņøÉ Ļ░£ļ░£ ņŚ░ĻĄ¼ļź╝ ņ¦ĆņåŹĒĢ┤ņś┤ņ£╝ļĪ£ņŹ© ņŗ¼ĒĢ┤ņĀĆ ņ▒äĻ┤æĻĖ░ņłĀ ļČäņĢ╝ņŚÉņä£ ņäĀļÅä ĻĖ░ņłĀ ļ│┤ņ£ĀĻĄŁņØś ņ£äņ╣śņŚÉ ņ¦äņ×ģĒĢĀ ņłś ņ׳Ļ▓ī ļÉśņŚłļŗż(Hong et al., 2006; Hong., 2010b). ņØ┤ļ¤¼ĒĢ£ ņä▒Ļ│╝ļŖö ĻĄŁņĀ£ĒĢ┤ņĀĆĻĖ░ĻĄ¼(International Sea-bed Authority, ISA) ļ░Å ĒāÉņé¼ņ▓┤ņĢĮņ×ÉļōżņŚÉĻ▓īļÅä ņØĖņĀĢļ░øĻ▓ī ļÉ©ņ£╝ļĪ£ņŹ©, Ē¢źĒøä Ļ│ĄĒĢ┤ņāü ņŗ¼ĒĢ┤ņĀĆĻ┤æļ¼╝ņ×ÉņøÉ Ļ░£ļ░£ĻĘ£ņ╣Ö(Mining Code) ņĀ£ņĀĢņŚÉ ņ׳ņ¢┤ņä£ ļīĆĒĢ£ļ»╝ĻĄŁņØś ņŻ╝ļÅäņĀüņØĖ ņ░ĖņŚ¼Ļ░Ć Ļ░ĆļŖźĒĢśĻ▓ī ļÉśņŚłļŗż. 2020ļģäĻ▓Į ņĀ£ņĀĢņØ┤ ņśłņāüļÉśĻ│Ā ņ׳ļŖö ISAņØś Ļ░£ļ░£ĻĘ£ņ╣ÖņØĆ ņŗ¼ĒĢ┤ņĀĆĻ┤æņŚģņØ┤ļ×Ć ņŗĀņé░ņŚģ Ēā£ļÅÖņØś ĻĘ╝Ļ░äņØ┤ ļÉĀ Ļ▓āņØ┤Ļ│Ā ņØ┤ļ¤¼ĒĢ£ Ļ░£ļ░£ĻĘ£ņ╣ÖņØś ņĀ£ņĀĢ Ļ│╝ņĀĢņŚÉļŖö ņ▒äĻ┤æņŗ£ņŖżĒģ£ņØś ļīĆĻĘ£ļ¬© ņŗżņ”Ø ņŗ£ĒŚśņØ┤ ņÜöĻĄ¼ļÉĀ Ļ▓āņ£╝ļĪ£ ņśłĻ▓¼ļÉśĻĖ░ņŚÉ ņäĀļÅä ĻĖ░ņłĀ ļ│┤ņ£ĀĻĄŁņ£╝ļĪ£ņä£ņØś ņŚŁĒĢĀ ņłśĒ¢ēņŚÉ ļīĆĒĢ£ ņżĆļ╣äĻ░Ć ĒĢäņÜöĒĢśļŗż. ņØ┤ņŚÉ ļīĆĒĢ£ ņżĆļ╣äļĪ£ ņäĀļ░ĢĒĢ┤ņ¢æĒöīļ×£ĒŖĖ ņŚ░ĻĄ¼ņåīņŚÉņä£ļŖö Ļ░ü ļČĆļČäņŚÉ ļīĆĒĢ£ ņśłļ╣äĒīīņØ╝ļ¤┐ ņä▒ļŖźņŗżņ”Ø ņŗ£ĒŚś(PPMT, pre-pilot mining test)ņØä Ļ│äĒÜŹ, ņŗżņ”Ø ņŗ£ĒŚś ļŗ©Ļ│äņŚÉ ņØ┤ļź┤ļĀĆļŗż(Yeu et al., 2013).
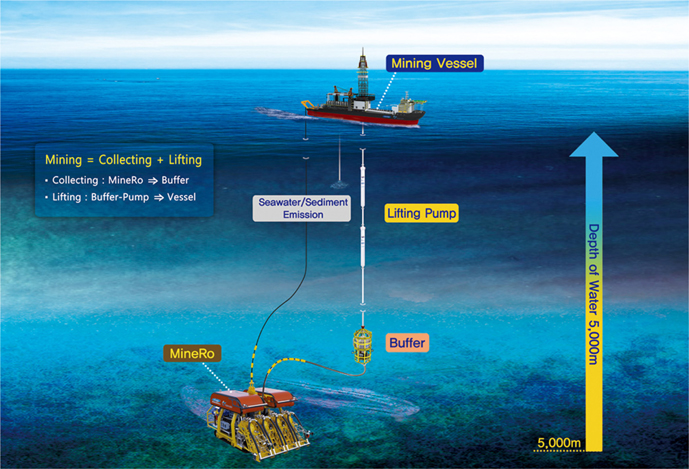
ņŗ¼ĒĢ┤ņĀĆ ļ¦ØĻ░äļŗ©Ļ┤┤ ņ▒äĻ┤æņŗ£ņŖżĒģ£ņØĆ Ļ░£ļģÉņĀüņ£╝ļĪ£ ņŗ¼ĒĢ┤ņŚÉ ļČĆņĪ┤ĒĢśļŖö ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņ¦æĻ┤æĒĢśļŖö ņ¦æĻ┤æņŗ£ņŖżĒģ£Ļ│╝ ņ¦æĻ┤æļÉ£ ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņäĀņāüĻ╣īņ¦Ć ļüīņ¢┤ņś¼ļ”¼ļŖö ņ¢æĻ┤æņŗ£ņŖżĒģ£ņ£╝ļĪ£ ĻĄ¼ļČäļÉ£ļŗż(Hong et al., 2007). ņØ┤ņŚÉ ļīĆĒĢ£ Ļ░£ļģÉļÅäļŖö Fig. 1Ļ│╝ Ļ░Öļŗż. ņ¦æĻ┤æņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļĪ£ļŖö 2007ļģä ņāüņŚģ ņ▒äĻ┤æļ¤ēņØś 1/20 ĻĘ£ļ¬©ļĪ£ ņŗ£ĒŚś ņ¦æĻ┤æĻĖ░Ļ░Ć ņĀ£ņ×æļÉśņŚłņ£╝ļ®░ 2010ļģä ļÅÖĒĢ┤ 130ļ»ĖĒä░ Ļ╣ŖņØ┤ņØś ĻĘ╝ĒĢ┤ņŚÉņä£ ņŗżņ”Ø ņŗ£ĒŚśņØä ĒåĄĒĢ┤ ņ¦æĻ┤æņä▒ļŖźņØä ĒÖĢņØĖĒĢśņśĆļŗż(Park et al., 2010). 2012ļģäņŚÉļŖö ņāüņŚģ ņ▒äĻ┤æļ¤ēņØś 1/4 ĻĘ£ļ¬©ņØś ĒīīņØ╝ļ¤┐ ņ¦æĻ┤æļĪ£ļ┤ćņØ┤ ņĀ£ņ×æļÉśņŚłņ£╝ļ®░ 2013ļģä ļÅÖĒĢ┤ 1,300ļ»ĖĒä░ Ļ╣ŖņØ┤ņØś ĻĘ╝ĒĢ┤ņŚÉņä£ ņŗżņ”Ø ņŗ£ĒŚśņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ä ļ░ö ņ׳ļŗż(Yeu et al., 2012; Yeu et al., 2013). ĒĢ£ĒÄĖ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļŖö 2009ļģä ļČłņŚ░ņåŹņĀüņ£╝ļĪ£ ņ¦æĻ┤æļÉśļŖö ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņ×äņŗ£ ņĀĆņן, ņØ╝ņĀĢĒĢ£ ņ¢æņ£╝ļĪ£ ņäĀņāüņ£╝ļĪ£ ņåĪņČ£ĒĢśĻĖ░ ņ£äĒĢ£ ņŗ£ņŖżĒģ£ņØĖ ļ▓äĒŹ╝ņŗ£ņŖżĒģ£ņØ┤ Ļ░£ļ░£ļÉśņŚłņ£╝ļ®░ 2,000ļ»ĖĒä░ņØś ņłśļæÉņŚÉ ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņåĪņČ£ĒĢĀ ņłś ņ׳ļŖö 6ļŗ© ņøÉņŗ¼ĒÄīĒöäļź╝ Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖö ņ¢æĻ┤æĒÄīĒöäĻ░Ć Ļ░£ļ░£ļÉśņŚłļŗż. ņØ┤ ļæÉ Ļ░£ņØś ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ ņłśņĪ░ņŗżĒŚśņØĆ ņŗżņŗ£ļÉśņŚłņ¦Ćļ¦ī ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ĒåĄĒĢ®ņĀüņØĖ ņŗżņ”Ø ņŗ£ĒŚśņØĆ ņĢäņ¦ü ņØ┤ļŻ©ņ¢┤ņ¦Ćņ¦Ć ņĢŖņĢśļŗż.
ļ│Ė ņŚ░ĻĄ¼ļŖö ĒīīņØ╝ļ¤┐ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņśłļ╣äĒīīņØ╝ļ¤┐ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚśņØä ņ£äĒĢ£ ņäĀņāü ņäżļ╣äņØś ņäżĻ│äĻ░Ć ļ¬®ņĀüņØ┤ļŗż. ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚśņØä ņ£äĒĢ£ ņäĀņāü ņäżļ╣äļŖö ĻĖ░ņĪ┤ ņśżņØ╝ ņŗ£ņČöļź╝ ņ£äĒĢ£ ĒĢ┤ņ¢æĒöīļ×£ĒŖĖ ņןļ╣äņÖĆļŖö ņÜ┤ņÜ® ļ¬®ņĀü, ļŗ©Ļ┤┤ ņ▓śļ”¼ ļ░®ļ▓Ģ ļō▒ņŚÉ ņ░©ņØ┤Ļ░Ć ņ׳ļŗż. ņ”ē, ņ▓śņØī ņŗ£ļÅäļÉśļŖö ņןļ╣äļōżļĪ£ņŹ© ņ×Éņ▓┤ ņäżĻ│ä, ņĀ£ņ×æļÉśĻĖ░ ļĢīļ¼ĖņŚÉ ĻĘĖ ņ£äĒŚśļÅäļŖö ļ¦żņÜ░ Ēü¼ļŗżĻ│Ā ĒĢĀ ņłś ņ׳ļŗż. ļö░ļØ╝ņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņ£äĒŚśļÅäņŚÉ ļö░ļźĖ Ļ░ü ņŗ£ņŖżĒģ£ņØś ļ░░ņ╣śļź╝ ņłśĒ¢ēĒĢśĻ│Ā FMEA(failure mode and effect analysis) ļČäņäØņØä ĒåĄĒĢ┤ Ļ░£ļģÉ ņäżĻ│äļČĆĒä░ ņĀ£ņ×æ, ņÜ┤ņÜ®Ļ╣īņ¦Ć ļ░£ņāØĒĢĀ ņłś ņ׳ļŖö Ļ│Āņןļ¬©ļō£ļź╝ ņŗØļ│äĒĢśņŚ¼ ņ£äĒŚśļÅäļź╝ ņĄ£ņåīĒÖö ĒĢĀ ņłś ņ׳ļŖö ļīĆņØæ ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢ£ļŗż. ļČäņäØ Ļ▓░Ļ│╝ ņĀ£ņŗ£ļÉ£ ļīĆņØæ ļ░®ņĢłņØĆ Ļ│Ā ņ£äĒŚśļÅä ņןļ╣äņØś ņ×Āņ×¼ļÉ£ ĻĘĖļ”¼Ļ│Ā ļ░£ņāØ Ļ░ĆļŖźĒĢ£ ņ£äĒŚśņÜöņåī ļ░Å ĻĘĖ ņøÉņØĖĻ│╝ Ļ▓░Ļ│╝ļź╝ ņ▓┤Ļ│äņĀüņ£╝ļĪ£ ļ░®ņ¦ĆĒĢĀ ņłś ņ׳ļŗż(Shafiee and Fateme, 2014).
2. ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚś ĻĄ¼ņä▒
2.1 ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚś ņżĆļ╣ä
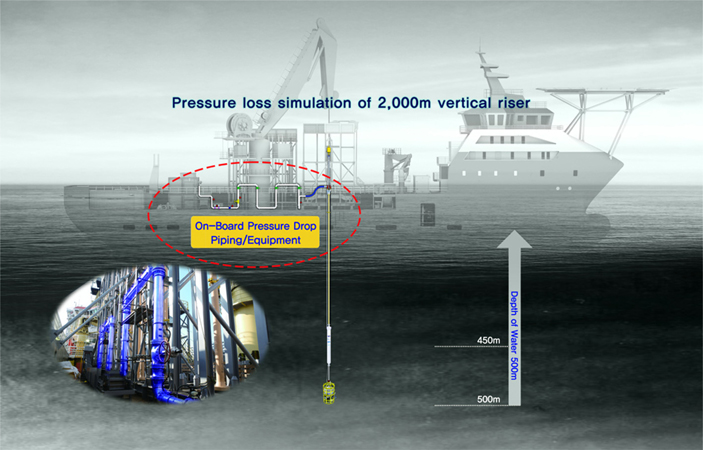
ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚśņØś ļ¬®Ēæ£ļŖö 2,000m ņłśņŗ¼ņØś ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņ¢æĻ┤æĒÄīĒöäĻ░Ć Ļ┤ĆņåÉņŗżņØä ņØ┤Ļ▓©ļé┤Ļ│Ā ņłśņāüņ£╝ļĪ£ ņ¢æņĀĢĒĢĀ ņłś ņ׳ļŖöĻ░Ćļź╝ ņŗżĒŚśĒĢśļŖö Ļ▓āņØ┤ļŗż. ĒĢśņ¦Ćļ¦ī ņŗżĒŚś ļ╣äņÜ®ņØś ĒĢ£Ļ│äļĪ£ ņ¢æĻ┤æĻ┤ĆņØä ņłśņŗ¼ 2,000mĻ╣īņ¦Ć ņäżņ╣śĒĢśļŖö Ļ▓āņØĆ ļČłĻ░ĆļŖźĒĢśņśĆļŗż. ļö░ļØ╝ņä£ ņ¢æĻ┤æĒÄīĒöäņØś ņ×æļÅÖņłśņŗ¼ņØĖ 500mņŚÉ ļ¦×ņČöņ¢┤ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØä ņäżņ╣śĒĢśĻ│Ā ņłśņŗ¼ 2,000m ļīĆļ╣ä ņ¢æĻ┤æĻ┤Ć ņČĢņåīņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢśļŖö ĒÄīĒöäņØś ņ¢æņĀĢ ļ¼ĖņĀ£ļŖö Fig. 2ņÖĆ Ļ░ÖņØ┤ ņ¢æĻ┤æĻ┤Ć ĒĢśļŗ© ĒØĪņ×ģļČĆņŚÉ ļ░ĖļĖīļź╝ ņäżņ╣śĒĢśņŚ¼ Ļ┤ĆņåÉņŗż ļ░£ņāØņØä ļ¬©ņé¼ĒĢ©ņ£╝ļĪ£ņŹ© ĒĢ┤Ļ▓░ĒĢśņśĆļŗż.
ņ¢æĻ┤æĒÄīĒöäņØś ņä▒ļŖź(ņ£Āļ¤ē, ņ¢æņĀĢ, ņŖ¼ļ¤¼ļ”¼ ņØ┤ņåĪ) ļ░Å ļ▓äĒŹ╝ņŗ£ņŖżĒģ£ņØś ņä▒ļŖź(ļŗ©Ļ┤┤ ļ│┤Ļ┤Ć, ļŗ©Ļ┤┤ Ēö╝ļö®) ņŗżņ”ØņØä ņ¦ĆņøÉĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ņŗ£ĒŚś ņäĀļ░ĢņØĆ ņČ®ļČäĒĢ£ Ēü¼ĻĖ░ņØś ļ¼ĖĒÆĆ(Moon-pool), ļŖźļÅÖņÜ┤ļÅÖļ│┤ņāüĒśĢ(AHC, acitve heave compensation) ļīĆņÜ®ļ¤ē Ēü¼ļĀłņØĖ, Ļ│Āņä▒ļŖź DPS ļō▒ņØä ĻĖ░ļ│Ė ņĀ£ņøÉņ£╝ļĪ£ Ļ░¢ņČöĻ│Ā ņ׳ļŖö OSV(offshore support vessel)ņØä ņé¼ņÜ®ĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŗ£ĒŚśņŚÉņä£ļŖö ņäĀņן 94.6m, ņäĀĒÅŁ 20m, ņ┤Ø Ēåżņłś 4,425Ēåż, DP2, AHC 100Ēåż, Moon-pool 6.5m├Ś6.5m ļō▒ņØś ņĀ£ņøÉņØä Ļ░Ćņ¦ĆļŖö OSVņØä ņ¦ĆņøÉ ņäĀļ░Ģņ£╝ļĪ£ ņäĀņĀĢĒĢśņśĆļŗż.
2.2 ņ¢æĻ┤æņŗ£ņŖżĒģ£ ĻĄ¼ņä▒
ņ¢æĻ┤æņŗ£ņŖżĒģ£ ĻĄ¼ņä▒ņØä ņé┤ĒÄ┤ļ│┤ļ®┤ Fig. 3Ļ│╝ Ļ░ÖņØ┤ ņ¢æĻ┤æĒÄīĒöä, ļ▓äĒŹ╝, ņ¢æĻ┤æĻ┤ĆņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ļ©╝ņĀĆ ņ¢æĻ┤æĒÄīĒöäļŖö Blushless ņĀäĻĖ░ļ¬©Ēä░ņÖĆ 6ļŗ© ņøÉņŗ¼ĒÄīĒöäļź╝ ņé¼ņÜ®ĒĢśļŖö ņŗ¼ņĀĢĒÄīĒöä Ļ░£ļģÉņØś ĒÄīĒöäļĪ£ņŹ© ņ£Āļ¤ē 500m3/h, ņ¢æņĀĢ 26.5bar, ņäżņ╣śņłśņŗ¼ 400m ĒåĀņČ£ņĢĢļĀź 45.3bar, ĒØĪņ×ģņĢĢļĀź 18.9bar, ņĀäĻĖ░ļ¬©Ēä░ 800kW(6.6kV, 3ņāü/4ĻĘ╣, 60Hz) ļō▒ņØś ņäżĻ│äņé¼ņ¢æņØä Ļ░¢ļŖö ĒÄīĒöäņØ┤ļŗż.
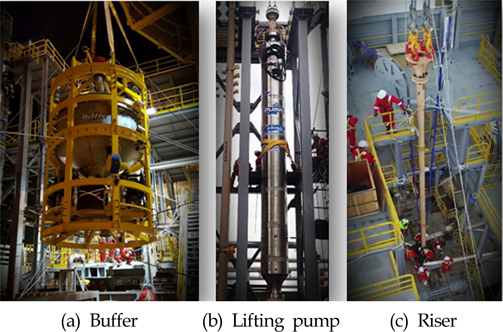
ļ▓äĒŹ╝ļŖö ņŗ£Ļ░äņĀüņ£╝ļĪ£ ļČłĻĘ£ņ╣ÖĒĢ£ ņ¦æĻ┤æĻ│ĄņĀĢĻ│╝ ņĢłņĀäņä▒ ļ░Å ĒÜ©ņ£©ņä▒ņØ┤ ņÜöĻĄ¼ļÉśļŖö ņ¢æĻ┤æĻ│ĄņĀĢņØä ņøÉĒÖ£Ē׳ ņŚ░Ļ▓░ņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ņżæĻ░äņĀĆņןĻĖ░ļŖź(ļ▓äĒŹ╝ļ¦ü)Ļ│╝ ņŖ¼ļ¤¼ļ”¼ Ļ┤Ćņ£ĀļÅÖ ļ│┤ņןĻĖ░ļŖźņØä Ļ░Ćņ¦ĆļŖö ņŗ£ņŖżĒģ£ņ£╝ļĪ£ ņäĀļ░ĢĒĢ┤ņ¢æĒöīļ×£ĒŖĖ ņŚ░ĻĄ¼ņåīņŚÉņä£ ļÅģņ×É Ļ░£ļ░£ļÉśņŚłļŗż(Yeu et al., 2012). ļ▓äĒŹ╝ļŖö ņāüļČĆņØś ņżæĻ░äņĀĆņן ĒśĖĒŹ╝(Hopper), ĒśĖĒŹ╝ ĒĢśļČĆņØś ļŗ©Ļ┤┤Ļ│ĄĻĖēņĀ£ņ¢┤ņןņ╣ś(Feeder), ņÖĖļČĆļ░░Ļ┤Ć(ņØĖņ×ģ, ĒåĀņČ£), ņĀäĻĖ░ņ£ĀņĢĢņĀ£ņ¢┤ņŗ£ņŖżĒģ£, ļ░®Ē¢źņĀ£ņ¢┤ ņČöņ¦äĻĖ░(Thruster) 2ļīĆ ļō▒ņ£╝ļĪ£ ĻĄ¼ņä▒ļÉ£ļŗż. ĒśĖĒŹ╝ļŖö ņĀĆņןņÜ®ņĀü 6m3ņ£╝ļĪ£ ņĄ£ļīĆ 7ĒåżņØś ļ¦ØĻ░äļŗ©Ļ┤┤ļź╝ ņĀĆņןĒĢĀ ņłś ņ׳ņ£╝ļ®░, FeederņØś Ļ│ĄĻĖēņÜ®ļ¤ēņØĆ ĒÅēĻĘĀ 10kg/s(ņĄ£ļīĆ 15kg/s)ņØä Ļ░¢ļÅäļĪØ ņŖżĒü¼ļźś ļ░®ņŗØņ£╝ļĪ£ Ļ░£ļ░£ļÉśņŚłļŗż. ļ▓äĒŹ╝ ņŗ£ņŖżĒģ£ņØś FeederņÖĆ ļ░®Ē¢źņĀ£ņ¢┤ ThrusterļŖö ņ£ĀņĢĢņ£╝ļĪ£ ņ×æļÅÖļÉśļ®░ ņøÉĻ▓®ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņĀ£ņ¢┤ļÉ£ļŗż.
ņ¢æĻ┤æĻ┤ĆņØĆ ĻĄŁļé┤ ļ»╝Ļ░äĻĖ░ņŚģņØś ĒŖ╣ĒŚłĻĖ░ņłĀņØĖ SAW(submerged arc welding) ļ░®ļ▓ĢņØä ņé¼ņÜ®ĒĢ┤ņä£ API 5L X80 ņ×¼ņ¦łņØś ņ¢æĻ┤ĆĻ┤ĆņØ┤ Ļ░£ļ░£ļÉśņŚłļŗż. Ēöīļ×£ņ¦Ć ĻĘ£Ļ▓®ņØĆ API 6A 6B 5000psi(ņ¢æĻ┤æĻ┤Ć)/10000psi(ņ¢æĻ┤æĒÄīĒöä) ļ░Å ASTM A182 F22 Class 3ņŚÉ ļö░ļØ╝ņä£ ĻĄŁļé┤ ņĀ£ņ×æļÉśņ¢┤ ņ¢æĻ┤æĻ┤ĆĻ│╝ ņÜ®ņĀæļÉśņŚłļŗż. ļŗ©ņ£ä ņ¢æĻ┤æĻ┤ĆņØś ĻĖĖņØ┤ļŖö 12.5m, ļé┤Ļ▓Į 202.7mm, ļæÉĻ╗ś 8.2mmļĪ£ ņĀ£ņ×æļÉśņŚłļŗż. ļ│Ė ņŗ£ĒŚśņØä ņ£äĒĢ┤ ņ┤Ø 38ļ│ĖņØś ņ¢æĻ┤æĻ┤ĆņØ┤ ņé¼ņÜ®ļÉśņŚłļŗż.
2.3 ņŗ£ĒŚśņ¦ĆņøÉņØä ņ£äĒĢ© ĒĢäņÜö ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ Ļ░£ļģÉņäżĻ│ä
ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņŗżņ”Øņŗ£ĒŚśņØś ņÜ┤ņÜ®ļÅäļŖö Fig. 4ņÖĆ Ļ░Öļŗż.
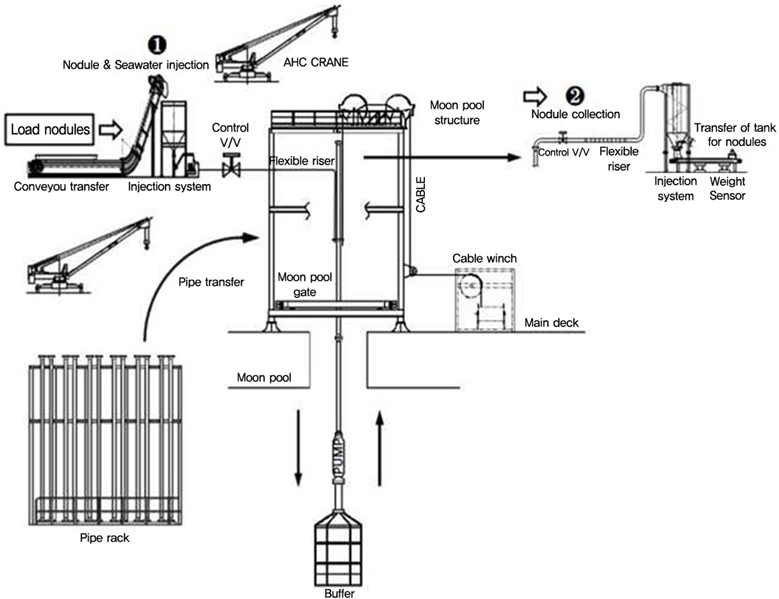
ļ│Ė ņŗ£ļéśļ”¼ņśżļŖö Ēü¼Ļ▓ī ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦ä/ĒÜīņłś ņ×æņŚģ, ļŗ©Ļ┤┤ Ēł¼ņ×ģ/ĒÜīņłśņ×æņŚģņ£╝ļĪ£ ĻĄ¼ņä▒ļÉ£ļŗż. ļ©╝ņĀĆ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņ¦ä/ĒÜīņłś ņ×æņŚģņØĆ ņäĀļ░ĢņŚÉ ņ׳ļŖö Ēü¼ļĀłņØĖņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļØ╝ņØ┤ņĀĆļ×ÖņŚÉ ņ׳ļŖö ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØä ļ¼ĖĒÆĆ ĒāĆņøīļź╝ ĒåĄĒĢ┤ ĒĢ┤ņĀĆļĪ£ ņ¦ä/ĒÜīņłś ņŗ£ĒéżļŖö ņ×æņŚģņØ┤ļŗż. ļŗ©Ļ┤┤ Ēł¼ņ×ģ/ĒÜīņłś ņ×æņŚģņØĆ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦äņłś ļÆż ņ¦äĒ¢ēļÉ£ļŗż. ņĀüņ×¼ļÉ£ ļŗ©Ļ┤┤ļź╝ ļŗ©Ļ┤┤ Ēł¼ņ×ģņŗ£ņŖżĒģ£ņ£╝ļĪ£ ļ▓äĒŹ╝ļĪ£ Ēł¼ņ×ģĒĢ£ ļÆż ļ▓äĒŹ╝ņŚÉ ņĀĆņןļÉ£ ļŗ©Ļ┤┤ļź╝ ņ¢æĻ┤æĒÄīĒöäļĪ£ ņäĀņāüņ£╝ļĪ£ ĒÜīņłśĒĢśļŖö Ļ│╝ņĀĢņØ┤ļŗż. ļśÉĒĢ£ 2000ļ»ĖĒä░ ņ¢æņĀĢņØä ļ¬©ņé¼ĒĢśĻĖ░ ņ£äĒĢ┤ Ļ░ÉņĢĢļ░░Ļ┤ĆņØä Ļ▒░ņ╣£ ļÆż ļŗ©Ļ┤┤ņÖĆ ĒĢ┤ņłśļź╝ ļČäļ”¼ĒĢśĻ│Ā ļŗ©Ļ┤┤ļŖö ņĀĆņן, ļČäļ”¼ļÉ£ ĒĢ┤ņłśļŖö ļ░░ņČ£ĒĢśļŖö ņ×æņŚģņØä ĒżĒĢ©ĒĢ£ļŗż. ņØ┤ļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØä ļ│┤Ļ┤ĆĒĢĀ ņłś ņ׳ļŖö ļØ╝ņØ┤ņĀĆļ×Ö, ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņäżņ╣ś/ĒĢ┤ņ▓┤ļź╝ ņ£äĒĢ£ ļ¼ĖĒÆĆ ĒāĆņøī, ņäĀņāüņĢĢļĀźĻ░ĢĒĢśļ░░Ļ┤Ć, ļŗ©Ļ┤┤ļČäļ”¼ĒÜīņłś ļ░Å ĒĢ┤ņłśļ░░ņČ£ ņŗ£ņŖżĒģ£ņØ┤ ĒĢäņÜöĒĢśļŗż. ļśÉĒĢ£ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņĀäņ▓┤ļź╝ ņÜ┤ņÜ®ĒĢĀ ņłś ņ׳ļŖö ņäĀņāü ĒåĄĒĢ®ņÜ┤ņÜ®ņŗ£ņŖżĒģ£, Ļ│ĀņĢĢ ņĀäļĀź Ļ│ĄĻĖēņØä ņ£äĒĢ£ ņäĀņāüļ░£ņĀäĻĖ░ ļ░Å ņŚäļ╣īļ”¼ņ╗¼-ņ£łņ╣ś(2ļīĆ, ļ▓äĒŹ╝ ļ░Å ĒÄīĒöäņÜ®), ņ¢æĻ┤æĒÄīĒöä ĻĄ¼ļÅÖ ņØĖļ▓äĒä░ ļō▒ņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ņØ┤ļź╝ ņ×ÉņäĖĒ׳ ņé┤ĒÄ┤ļ│┤ļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż.
(1) ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦ä/ĒÜīņłśļź╝ ņ£äĒĢ┤ Ēöīļ×£ņ¦Ć ņ▓┤Ļ▓░ļ░®ņŗØņØä ņäĀĒāØĒĢśņśĆļŗż. ņ▓┤Ļ▓░ņ×æņŚģņØä ņ£äĒĢ£ Ēöīļ×½ĒÅ╝ņØĖ ļ¼ĖĒÆĆ ĒāĆņøīļŖö Ēü¼ĻĖ░Ļ░Ć ņä£ļĪ£ ļŗżļźĖ ņ¢æĻ┤æņŗ£ņŖżĒģ£(ļ▓äĒŹ╝, ņ¢æĻ┤æĒÄīĒöä, ņ¢æĻ┤æĻ┤Ć)ņØä ņ¦ä/ĒÜīņłś ņŗ£Ēé¼ ņłś ņ׳ļÅäļĪØ ļ¼ĖĒÆĆ ĒāĆņøī ļ░Å ļ¼ĖĒÆĆ Ļ▓īņØ┤ĒŖĖ ļō▒ņØ┤ ņ×Éņ▓┤ ņäżĻ│ä┬ĘņĀ£ņ×æļÉśņŚłļŗż. ļ¼ĖĒÆĆ ĒāĆņøīļŖö ņĀäņ▓┤ ĒĢśņżæņØä ņ¦Ćņ¦ĆĒĢśĻ│Ā Ļ░ü ņĖĄļ¦łļŗż ņ×æņŚģ Ļ│ĄĻ░äņØ┤ ĒÖĢļ│┤ļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż. ļśÉĒĢ£ ļ▓äĒŹ╝ņØś ņ¦ä/ĒÜīņłśļź╝ ņ£äĒĢ┤ 5m ņØ┤ņāü Ļ░£ļ░®ņØ┤ Ļ░ĆļŖźĒĢ£ ļ¼ĖĒÆĆ Ļ▓īņØ┤ĒŖĖĻ░Ć ļ¦łļĀ©ļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż.
(2) 500mņØś ņłśņŗ¼Ļ╣īņ¦Ć ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦äņłśņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ņé¼ņÜ®ļÉ£ ņ¢æĻ┤æĻ┤ĆņØĆ 38ļ│ĖņØ┤ļŗż. ļö░ļØ╝ņä£ ņ¢æĻ┤æĻ┤ĆņØś ļ│┤Ļ┤Ć ņןņåīĻ░Ć ņäĀļ░Ģ ļŹ░Ēü¼ ļé┤ļČĆņŚÉ ļ¦łļĀ©ļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļŹ░Ēü¼ ļ®┤ņĀüņØś ņĀ£ĒĢ£ņ£╝ļĪ£ ņłśņ¦ü Ļ▒░ņ╣śņŗØņ£╝ļĪ£ ļØ╝ņØ┤ņĀĆ Ļ▒░ņ╣śļīĆļź╝ ņ×Éņ▓┤ ņäżĻ│ä ņĀ£ņ×æĒĢśņśĆļŗż.
(3) ņłśņ¦ü ņ¢æĻ┤æĻ┤ĆņØś ĻĖĖņØ┤ ņČĢņåī(ļŗ╣ņ┤ł 2,500m ŌåÆ ļ│ĆĻ▓Į 500m)ņŚÉ ļö░ļźĖ Ļ┤Ćļé┤ņĢĢļĀźņåÉņŗż ņ░©ņØ┤ļŖö ņäĀņāüļ░░Ļ┤ĆņØä ĒåĄĒĢ┤ņä£ ļ¬©ņé¼ĒĢśļŖö ļ░®ļ▓Ģņ£╝ļĪ£ ņŗżņ”Ø ņŗ£ĒŚśņØ┤ ņłśĒ¢ēļÉśņŚłļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö EngelmannņØś ņŚ░ĻĄ¼Ļ▓░Ļ│╝ņŚÉ ļö░ļØ╝ ļ¦ØĻ░äļŗ©Ļ┤┤Ļ░Ć ĒżĒĢ©ļÉ£ ņŖ¼ļ¤¼ļ”¼ņØś 2,000mņŚÉ ļīĆĒĢ£ ņĢĢļĀźņåÉņŗżņØä ņśłņĖĪĒĢśņśĆņ£╝ļ®░(Engelmann, 1978), ņØ┤ļź╝ ņāüĒÖ®ņŚÉ ļ¦×Ļ▓ī ņĢĢļĀźņåÉņŗżņØä ņĪ░ņĀłĒĢĀ ņłś ņ׳ļŖö ļ░ĖļĖī ļ░Å Ļ│ĀņĀĢņĀüņ£╝ļĪ£ Ēü░ ņĢĢļĀźņåÉņŗżņØ┤ Ļ░ĆļŖźĒĢ£ ņśżļ”¼Ēö╝ņŖżļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļ░░Ļ┤ĆņäżĻ│äļź╝ ņłśĒ¢ēĒĢśņśĆļŗż.
(4) ĒÜīņłśļÉ£ ļ¬©ņĪ░ļŗ©Ļ┤┤ļź╝ ĒĢ┤ņłśņÖĆ ļČäļ”¼ ĒÜīņłśĒĢśļŖö ņןņ╣śņÖĆ ņØ╝ņĀĢņŗ£Ļ░ä ļÅÖņĢłņØś ņ¢æĻ┤æļ¤ē ņĀĆņן ņĖĪņĀĢĒĢśļŖö ņןņ╣śļź╝ ņäżĻ│ä┬ĘņĀ£ņ×æĒĢśņśĆļŗż. ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņŗżņ”Øņŗ£ĒŚśņŚÉņä£ ļ¬®Ēæ£ļĪ£ ĒĢśļŖö ļŗ©Ļ┤┤ņŖ¼ļ¤¼ļ”¼ ņ£Āļ¤ēņØ┤ 500m3/hrņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņØ┤ļź╝ ņ▓śļ”¼ĒĢĀ ņłś ņ׳ļÅäļĪØ ņäżĻ│äļÉśņ¢┤ņĢ╝ ĒĢśļ®░ ļČäļ”¼ļÉ£ ļŗ©Ļ┤┤ļŖö ņØ┤ņåĪ ļ░Å ņĀĆņןĒĢśĻ│Ā ĒĢ┤ņłśļŖö ņäĀļ░Ģ ļ░¢ņ£╝ļĪ£ ļ░░ņČ£ļÉĀ ņłś ņ׳ļÅäļĪØ ņäżĻ│äĒĢśņśĆļŗż. Ļ│äĒÜŹļÉ£ ļŗ©Ļ┤┤ļåŹļÅäļŖö ņĢĮ 3vol%ļĪ£ ņĢĮ 485m3/hrņØś ĒĢ┤ņłśņ£Āļ¤ēņØä ņäĀļ░Ģ ļ░¢ņ£╝ļĪ£ ļ░░ņłśĒĢśĻĖ░ ņ£äĒĢ┤ ņŖ¼ļ¤¼ļ”¼ĒÄīĒöäņÖĆ ņ×ÉņŚ░ļ░░ņłśĻ┤ĆņØä ņŚ░Ļ▓░ĒĢśļŖö ļ░®ņŗØņØä ņäĀņĀĢĒĢśņśĆļŗż.
(5) ļ▓äĒŹ╝ ņŗ£ņŖżĒģ£Ļ│╝ ņ¢æĻ┤æĒÄīĒöä ņ×æļÅÖņØä ņ£äĒĢśņŚ¼ Ļ░üĻ░üņØś ņŚäļ╣īļ”¼ņ╗¼/ņ£łņ╣ś(2ĻĖ░)ļź╝ ņŻ╝ļ¼Ė ņäżĻ│ä┬ĘņĀ£ņ×æĒĢśņśĆļŗż.
(6) ļ▓äĒŹ╝-ņ¢æĻ┤æĒÄīĒöä ĒåĄĒĢ®ņÜ┤ņÜ®, ņäĀņāüļ░░Ļ┤Ć ņ£Āļ¤ē/ņĢĢļĀź ņĖĪņĀĢ ļ░Å ņ¢æĻ┤æņŖ¼ļ¤¼ļ”¼ ņżæļ¤ē ņĖĪņĀĢ ļō▒ņØś ĒåĄĒĢ®ņÜ┤ņÜ®ļ¬©ļŗłĒä░ļ¦üņØä ļŗ┤ļŗ╣ĒĢśļŖö ĒåĄĒĢ®ņÜ┤ņÜ®ņŗ£ņŖżĒģ£(H/W, S/W)ņØ┤ ņ×Éņ▓┤ Ļ░£ļ░£ļÉśņŚłļŗż.
3. ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņä▒ļŖź ņŗ£ĒŚśņØä ņ£äĒĢ£ ņ£äĒŚśļÅä ĻĖ░ļ░ś ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ ņäżĻ│ä
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņ£äĒŚśļÅäļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ ļ░░ņ╣ś ļ░Å ņäżĻ│äļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. ņłśĒ¢ē ņĀłņ░©ļŖö ļ©╝ņĀĆ ņĢ× ņĀłņŚÉņä£ ņĀĢņØśļÉ£ Ļ░ü ņŗ£ņŖżĒģ£ņØś ņ£äĒŚśļÅäņÖĆ ĻĖ░ļŖźņØä Ļ│ĀļĀżĒĢśņŚ¼ ņäĀņāü ļ░░ņ╣śļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. ĻĘĖ ļÆż FMEA ļČäņäØņØä ĒåĄĒĢ┤ Ļ░£ļģÉ ņäżĻ│äļČĆĒä░ ņĀ£ņ×æ, ņÜ┤ņÜ®Ļ╣īņ¦Ć ļ░£ņāØĒĢĀ ņłś ņ׳ļŖö Ļ│Āņןļ¬©ļō£ļź╝ ņŗØļ│äĒĢśņŚ¼ Ēü░ ņ£äĒŚśņÜöņåīņŚÉ ļīĆĒĢ┤ņä£ ņ£äĒŚśļÅä ņĀĆĻ░ÉņØä ņ£äĒĢ£ Ļ░£ņäĀņäżĻ│ä ļ░Å ļīĆņØæļ░®ņĢłņØä ļ¦łļĀ©ĒĢśņśĆļŗż. ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņāüņäĖņäżĻ│äļź╝ ņłśĒ¢ēĒĢśņŚ¼ ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ņØä ņĀ£ņ×æĒĢśņśĆļŗż.
3.1 ņ£äĒŚśļÅä ļ░Å ĻĖ░ļŖźņØä Ļ│ĀļĀżĒĢ£ ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ ļ░░ņ╣ś
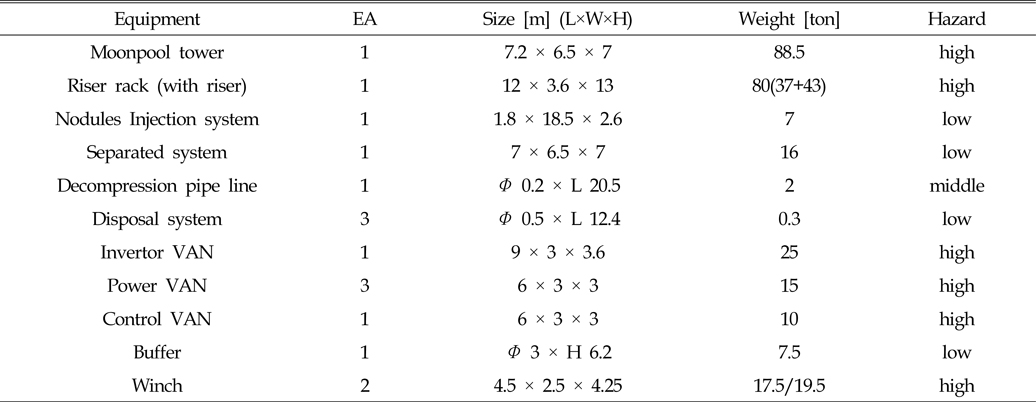
ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ņØś ļ░░ņ╣śļŖö ņÜ┤ņÜ®ņĀüņØĖ ņĖĪļ®┤ļ┐Éļ¦ī ņĢäļŗłļØ╝ ņäĀļ░Ģ ĒĢśļČĆņØś ĻĄ¼ņĪ░, ņ£äĒŚśļÅäĻ╣īņ¦Ć ļÅÖņŗ£ņŚÉ Ļ│ĀļĀżļÉśņ¢┤ņĢ╝ ĒĢśļŖö ļ¦żņÜ░ ņżæņÜöĒĢ£ ņäżĻ│ä ņÜöņåīņØ┤ļŗż. ĻĖ░ņĪ┤ ĒĢ┤ņ¢æĒöīļ×£ĒŖĖ FPSO(Floating production storage offloading) ļ░░ņ╣ś ņäżĻ│ä ņŚŁņŗ£ ņżæņÜöĒĢ£ ņÜöņåīļĪ£ Ļ░äņŻ╝ļÉśņ¢┤ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉ£ ļ░ö ņ׳ļŗż(Ku et al., 2014). ļ│Ė ņŗżņ”Øņŗ£ĒŚśņØä ņ£äĒĢ┤ ņäĀļ░ĢņŚÉ ņĀüņ×¼ĒĢ┤ņĢ╝ĒĢśļŖö ņןļ╣ä ļ¼┤Ļ▓īļŖö ņĢĮ 280Ēåżņ£╝ļĪ£ ņןļ╣ä ļ¼┤Ļ▓īņÖĆ ņןļ╣äņØś ņ£äĒŚśļÅäļŖö Table 1Ļ│╝ Ļ░Öļŗż. Ļ│ĀņĢĢ ļ░Å ĒÖöņ×¼ ĒÅŁļ░£ ņ£äĒŚśņØ┤ ļö░ļź┤ļŖö ļ░£ņĀäĻĖ░ ļ░Å Ļ│ĀņĢĢņØĖ ļ▓äĒä░ VanņØĆ ņ×æņŚģ Ļ│ĄĻ░ä ļ░Å ņé¼ļ×īņØ┤ ļ░Ćņ¦æĒĢ£ Ļ││Ļ│╝ Ļ░Ćņן ļ®Ćļ”¼ ļ¢©ņ¢┤ņ¦ä ņäĀļ░Ģ ņäĀļ»Ė ļČĆļČäņŚÉ ņ£äņ╣śĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļśÉĒĢ£ ļ░£ņĀäĻĖ░-Ļ│ĀņĢĢņØĖļ▓äĒä░-ņŚäļ╣īļ”¼ņ╗¼/ņ£łņ╣ś ņŗ£ņŖżĒģ£ņ£╝ļĪ£ ņØ┤ņ¢┤ņ¦Ćļ»ĆļĪ£ ņĀäņäĀņØś Ļ╝¼ņ×äņØ┤ ļ░£ņāØĒĢśņ¦Ć ņĢŖļÅäļĪØ ļ░░ņ╣śļź╝ Ļ▓░ņĀĢĒĢ┤ņĢ╝ ĒĢ£ļŗż. Ļ│Ā ņ£äĒŚśļÅä ĻĄ░ņŚÉ ĒżĒĢ©ļÉśļŖö ņŚäļ╣īļ”¼ņ╗¼/ņ£łņ╣ś ņŗ£ņŖżĒģ£ņØś Ļ▓ĮņÜ░ ņäĀļ»ĖņŚÉ ļ░░ņ╣śĒĢ┤ņĢ╝ ĒĢśļéś ļ¼ĖĒÆĆ ĒāĆņøīĻ╣īņ¦Ć Ļ▒░ļ”¼Ļ░Ć ĻĖĖņ¢┤ņ¦ĆĻ│Ā ņé¼ļ×īņØś ĒåĄĒ¢ēņØ┤ ņ׳ļŖö Ļ││ņØä ņ¦Ćļéśņ╣Ā Ļ▓ĮņÜ░ ņ╝ĆņØ┤ļĖöņØś ņåÉņāüņØ┤ ļŹö Ēü░ ņ£äĒŚśļÅäļź╝ ļ░£ņāØņŗ£Ēé©ļŗż. ļö░ļØ╝ņä£ ļ¼ĖĒÆĆ ĒāĆņøīņŚÉ Ļ░ĆĻ╣ØĻ│Ā ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦ä/ĒÜīņłś ņāüĒÖ®ņØä ļ░öļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŖö ļČĆļČäņŚÉ ļ░░ņ╣śņŗ£ņ╝░ļŗż.
ĻĖ░ļŖźņĀüņ£╝ļĪ£ļŖö ļ╣ĀļźĖ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņäżņ╣śļź╝ ņ£äĒĢ┤ ļØ╝ņØ┤ņĀĆļ×ÖņØĆ ļ¼ĖĒÆĆ ĒāĆņøī ņĖĪļ®┤ņŚÉ ņäżņ╣śĒĢśņśĆņ£╝ļ®░, ņĢłņĀäņØä ņ£äĒĢ┤ ļ®öņØĖ Ēü¼ļĀłņØĖņØś ņØ┤ļÅÖ ļ░śĻ▓ĮĻ│╝ ņé¼ļ×īņØś ļÅÖņäĀņØ┤ Ļ▓╣ņ╣śņ¦Ć ņĢŖļÅäļĪØ Ļ│ĀļĀżĒĢśņŚ¼ ļ░░ņ╣śĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā Ļ░ÉņĢĢļ░░Ļ┤ĆņØś Ļ▓ĮņÜ░ ļØ╝ņØ┤ņĀĆļ×Ö ĻĖ░ļæźņŚÉ Ļ│ĀņĀĢĒĢśņŚ¼ ņäżņ╣śĒĢśņśĆļŗż. Ļ░ÉņĢĢļ░░Ļ┤ĆņØĆ ņżæ ņ£äĒŚśļÅäņŚÉ ņåŹĒĢśļ»ĆļĪ£ ņé¼ļ×īņØś ĒåĄĒ¢ēņØ┤ ņĀ£ĒĢ£ļÉśļŖö Ļ││ņŚÉ ļ░░ņ╣śĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŗżņ”Øņŗ£ĒŚśņŚÉņä£ļŖö ļŗ©Ļ┤┤ Ēł¼ņ×ģĻ│╝ ĒÜīņłśļź╝ ņŚ░ņåŹņĀüņ£╝ļĪ£ ĒĢśņ¦Ć ņĢŖĻĖ░ ļĢīļ¼ĖņŚÉ ļŗ©Ļ┤┤ Ēł¼ņ×ģ ņŗ£ņŖżĒģ£ņØ┤ ņ£äņ╣śĒĢ£ ļČĆļČäĻ│╝ Ļ░ÉņĢĢņןņ╣śļź╝ Ļ░ÖņØ┤ ņ£äņ╣śņŗ£ņ╝£ Ēł¼ņ×ģĒĢĀ ļĢīļŖö ņé¼ļ×īņØ┤ ņ¦ĆļéśļŗżļŗłļŖö Ļ│ĄĻ░äņ£╝ļĪ£ ĒÜīņłśĒĢĀ ļĢīļŖö ņé¼ļ×īņØś ņČ£ņ×ģņØä ņĀ£ĒĢ£ĒĢśļÅäļĪØ ļ░░ņ╣śĒĢśņśĆļŗż. ĒÜīņłśņŗ£ņŖżĒģ£ņØĆ Ēü░ ņåīņØīņØ┤ ļ░£ņāØĒĢśĻ│Ā ļ¦ÄņØĆ ņ¢æņØś ļ¼╝ņØ┤ ļ░£ņāØĒĢśņŚ¼ ņé¼ļ×īņØ┤ ļ»Ėļüäļ¤¼ņ¦ł ņłś ņ׳ņ£╝ļ»ĆļĪ£ ņāüļīĆņĀüņ£╝ļĪ£ ņäĀļ»Ė ņ¦ĆņŚŁņŚÉ ļ░░ņ╣śĒĢśņśĆļŗż. ĒĢśņ¦Ćļ¦ī ĒĢ┤ņłśĻ░Ć ļ░£ņĀäĻĖ░, Ļ│ĀņĢĢņØĖļ▓äĒä░ņŚÉ ņ╣©Ēł¼ĒĢśņ¦Ć ņĢŖļÅäļĪØ ļæÉ ņŗ£ņŖżĒģ£Ļ░äņØś ņØ┤Ļ▓® Ļ▒░ļ”¼ ļ░Å ļČäļ”¼ļīĆļź╝ ņäżņ╣ś, ļ░£ņĀäĻĖ░ ļ░Å Ļ│ĀņĢĢņØĖļ▓äĒä░ļź╝ ļåÆņŚ¼ņä£ ņäżņ╣śĒĢśļÅäļĪØ ĒĢśņŚ¼ ņ£äĒŚśļÅäļź╝ ņĀ£Ļ▒░ĒĢśņśĆļŗż. ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ Control VanņØĆ ĻĖ┤ĻĖē ņāüĒÖ® ņŗ£ ņé¼ļ×īņØ┤ ļ╣©ļ”¼ ņ¦äņ×ģĒĢĀ ņłś ņ׳ņ¢┤ņĢ╝ ĒĢśļ®░ ļ¬©ļōĀ ņŗ£ņŖżĒģ£ņØä ņĀ£ņ¢┤ĒĢ┤ņĢ╝ ĒĢśļ»ĆļĪ£ Ļ░Ćņן Ļ░ĆĻ╣īņÜ┤ A ļŹ░Ēü¼ņŚÉ ņäżņ╣śĒĢśņśĆļŗż. ņäĀļ░Ģ ņ£äņŚÉ ņäżņ╣śļÉśļŖö ļ¬©ļōĀ ņŗ£ņŖżĒģ£ņØĆ ĒĢśņżæĻ│╝ ņäĀļ░Ģ ĒĢśļČĆņØś ļ®öņØĖ ĒöäļĀłņ×äĻ░äņØś ņĢłņĀĢņä▒ņØä Ļ│ĀļĀżĒĢśņŚ¼ ņĀĢĒÖĢĒĢ£ ņ£äņ╣śļź╝ Ļ▓░ņĀĢĒĢśņśĆĻ│Ā DNV-GL(Det Norske Veritas/Germanischer Lloyd)ņØś ņŖ╣ņØĖņØä ļ░øņĢä ņ¦äĒ¢ēĒĢśņśĆļŗż. ņØ┤ņŚÉ ļö░ļźĖ ņĀäņ▓┤ ļ░░ņ╣śļÅäļŖö Fig. 5ņÖĆ Ļ░Öļŗż.

3.2 FMEA ļČäņäØ
ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņŗżņ”Ø ņŗ£ĒŚśņØä ņ£äĒĢ£ ņäĀņāü ņäżļ╣äļŖö ņ×Éņ▓┤ Ļ░£ļ░£, ņĀ£ņ×æļÉśļŖö ļČĆļČäņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņ£äĒŚśļÅä ĒÅēĻ░ĆĻ░Ć ĒĢäņłśņĀüņØ┤ļŗż. ņ£äĒŚśļÅä ĒÅēĻ░ĆļŖö ļ©╝ņĀĆ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ĒåĄĒĢ® ņÜ┤ņÜ®ņŚÉņä£ ļ░£ņāØĒĢĀ ņłś ņ׳ļŖö Ļ│Āņןļ¬©ļō£ļź╝ ļČäņäØĒĢśĻ│Ā, ņØ┤Ļ▓āņØś ļ░£ņāØ ļ╣łļÅäņÖĆ ļ░£ņāØņŚÉ ļö░ļźĖ ņåÉņāü/Ēö╝ĒĢ┤ ņĀĢļÅäļź╝ Ļ░ØĻ┤ĆņĀüņ£╝ļĪ£ ļČäņäØĒĢśļŖö Ļ▓āņØ┤ļŗż. ļŗżņØīņ£╝ļĪ£ļŖö ļČäņäØļÉ£ Ļ│Āņןļ¬©ļō£ņØś Ēö╝ĒĢ┤ļź╝ ņĄ£ņåīĒÖö ĒĢĀ ņłś ņ׳ļŖö ļīĆņØæ ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśĻ│Ā, ņØ┤ļź╝ ĒåĄĒĢ┤ ļ░£ņāØļ╣łļÅäņÖĆ ņåÉņāü/Ēö╝ĒĢ┤ņØś ņĀĆĻ░É ņĀĢļÅäļź╝ ņśłņĖĪĒĢśļŖö Ļ▓āņØ┤ļŗż.
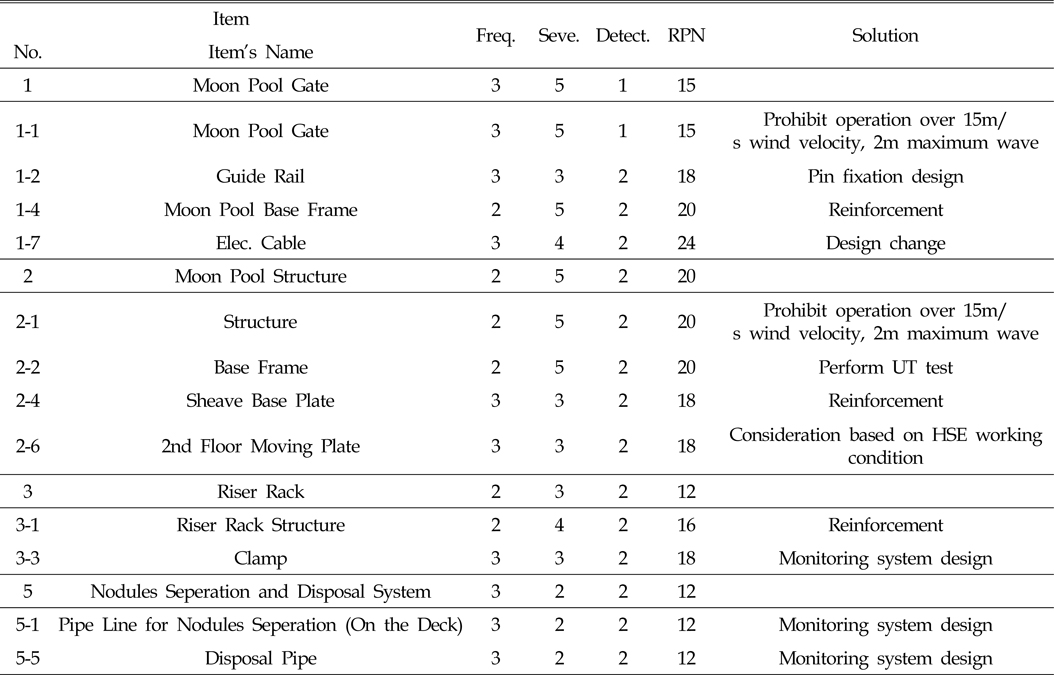
FMEA ļČäņäØņØĆ ļīĆņāü ņŗ£ņŖżĒģ£ņŚÉ ņ×Āņ×¼ļÉ£ ĻĘĖļ”¼Ļ│Ā ļ░£ņāØ Ļ░ĆļŖźĒĢ£ Ļ│Āņןļ¬©ļō£ ļ░Å ĻĘĖ ņøÉņØĖĻ│╝ Ļ▓░Ļ│╝ļź╝ ņ▓┤Ļ│äņĀüņ£╝ļĪ£ ļ╣Āņ¦ÉņŚåņØ┤ ņŗØļ│äĒĢĀ ņłś ņ׳ņ£╝ļ®░, FMEA ņżæņŚÉ ļģ╝ņØśļÉśĻ│Ā Ļ▓░ņĀĢļÉ£ ņ£äĒŚśļÅä ņ¦Ćņłśļź╝ ĒåĄĒĢ┤ ļīĆņāüņŗ£ņŖżĒģ£ņØś ņĀäļ░śņĀüņØĖ ņĢłņĀäņä▒ ņłśņżĆņØä ņĀĢņä▒ņĀü(Qualitative) ļśÉļŖö ņżĆņĀĢļ¤ēņĀü(Semi-quantitative)ņ£╝ļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņŗØļ│äļÉ£ ņ£äĒŚśņÜöņåīļōżņØś ņøÉņØĖĻ│╝ Ļ▓░Ļ│╝ļź╝ ņĀüņĀłĒ׳ ņĀ£ņ¢┤ĒĢśņŚ¼ ĒĢ┤ļŗ╣ ņ£äĒŚśļÅäļź╝ Ļ░Éņåīņŗ£ĒéżĻĖ░ ņ£äĒĢ£ ļīĆņØæ ļ░®ņĢł, ņ”ē ņĢłņĀäņŗ£ņŖżĒģ£ņØä ĒĢ®ļ”¼ņĀüņØ┤Ļ│Ā ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ļÅäņČ£ĒĢ┤ ļāäņ£╝ļĪ£ņŹ© ļīĆņāü ņŗ£ņŖżĒģ£ņØä ļ│┤ļŗż ņĢłņĀäĒĢśĻ│Ā ņŗĀļó░ĒĢĀ ņłś ņ׳ļŖö ņłśņżĆņ£╝ļĪ£ Ļ░£ļ░£ĒĢĀ ņłś ņ׳Ļ▓ī ĒĢśļŖö Ļ▓ā ļśÉĒĢ£ FMEAņØś ņżæņÜöĒĢ£ ņŚŁĒĢĀņØ┤ņ×É ļ¬®ņĀüņØ┤ļØ╝ ĒĢĀ ņłś ņ׳ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļ░£ņŻ╝ņ▓ś, ņäżĻ│ä, ņĀ£ņ×æ ļ░Å Ļ░Éņé¼ ņŚģņ▓┤ļōżņØä ĒżĒĢ©ĒĢśņŚ¼ FMEA ĻĘĖļŻ╣ņØä ĻĄ¼ņä▒ĒĢśņśĆĻ│Ā 3ļ▓łņØś ĒÜīņØśņŚÉ Ļ▒░ņ│É FMEA ļČäņäØņØä ņŗżņŗ£ĒĢśņśĆļŗż. ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņŗżņ”Øņŗ£ĒŚśņØä ņ£äĒĢ£ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņłśņżæ ņ¦ä/ĒÜīņłś ņäżņ╣ś, ĻĖ░ļÅÖ ļ░Å ņ¢æĻ┤æ, ņäĀņāüļČäļ”¼ ļ░Å ņ▓śļ”¼Ļ│╝ņĀĢ ņāüĒÖ®ņŚÉņä£ņØś ļ¬©ļōĀ Ļ│Āņןļ¬©ļō£ļź╝ ņŗØļ│äĒĢśņśĆļŗż. Ļ░ü Ļ│Āņןļ¬©ļō£ņØś ļ╣łļÅä, ņśüĒ¢ź ņĀĢļÅäļź╝ Table 3ņŚÉ ņāüņäĖĒ׳ Ēæ£ĻĖ░ĒĢśņśĆļŗż. ĒŖ╣Ē׳, ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņ¦ä/ĒÜīņłś ņ×æņŚģ ņżæ ņןļ╣ä ņČ®ļÅī, ļ¼ĖĒÆĆ Ļ▓īņØ┤ĒŖĖ ļĀłņØ╝ ņØ┤Ēāł, ĒĢśņżæņŚÉ ņØśĒĢ£ ĒīīņåÉ ļ░Å ļ│ĆĒśĢ, ļŗ©Ļ┤┤ ĒÜīņłś ņŗ£ņŖżĒģ£ņØś ļ¦łņ░░ ļ░Å ņØ┤ļ¼╝ņ¦łļĪ£ ņØĖĒĢ£ ļłäņłś ļśÉļŖö ņ×æļÅÖ ļČłļŖźņØ┤ ņ£äĒŚśļÅäĻ░Ć ļ¦żņÜ░ ļåÆņØĆ Ļ▓āņ£╝ļĪ£ ĒīīņĢģļÉśņŚłļŗż. ĒŖ╣Ē׳ ļŗ©Ļ┤┤ ĒÜīņłś ņŗ£ņŖżĒģ£ņØś Ļ▓ĮņÜ░ ņāüļīĆņĀüņ£╝ļĪ£ ļåÆņ¦Ć ņĢŖņØĆ Ļ│Āņןļ¬©ļō£ņØ┤ņ¦Ćļ¦ī Ļ▓©ņÜĖņ▓Ā ņŗżĒŚśņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ Ļ▓░ļ╣Ö, ņ×æņŚģņ×ÉņØś ņāüĒĢ┤ļź╝ Ļ│ĀļĀżĒĢśņŚ¼ ņäĀņĀĢĒĢśņśĆļŗż. ņŗØļ│äļÉ£ ļåÆņØĆ Ļ│Āņןļ¬©ļō£ļŖö ņÜ┤ņÜ® ĒÖśĻ▓Į Ļ░ĆņØ┤ļō£ļØ╝ņØĖ ĻĄ¼ņČĢ, ĻĄ¼ņĪ░ ļ│ĆĻ▓Į, ĻĄ¼ņĪ░ ļČłļ¤ē Ļ▓Ćņé¼ ņŗ£ņŖżĒģ£ ĻĄ¼ņČĢ, ņ£äĒŚś Ļ░Éņ¦Ć ĒöäļĪ£ņäĖņŖż ņČöĻ░Ć ļ░Å ņ×æņŚģņ×ÉņØś Ļ░Éņŗ£ ļśÉļŖö Ļ░üļ│äĒĢ£ ņŻ╝ņØś ļō▒ņØś ĒśĢĒā£ļĪ£ ļ░®ņĢłņØ┤ ļ¦łļĀ©ļÉśņŚłļŗż. ņØ┤ļŖö Table 2ņŚÉ Ēæ£ĻĖ░ļÉśņ¢┤ ņ׳ļŗż.

4. ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ ņāüņäĖ ņäżĻ│ä ļ░Å ņäżņ╣ś, ņÜ┤ņÜ®


5. Ļ▓░ ļĪĀ
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ĒīīņØ╝ļ¤┐ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņśłļ╣äĒīīņØ╝ļ¤┐ ņä▒ļŖź ņŗżņ”Øņŗ£ĒŚś(PPMT)ņØä ņ£äĒĢ┤ Ļ░£ļģÉ ņäżĻ│ä ļŗ©Ļ│äņŚÉņä£ ņÜ┤ņÜ® ņŗ£ļéśļ”¼ņśżņŚÉ ļö░ļØ╝ ĒĢäņÜöĒĢ£ ņäĀņāü ņŗ£ņŖżĒģ£ņØä ņĀĢņØśĒĢśĻ│Ā ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņäĀņāü ņäżļ╣äņØś ļ░░ņ╣śņÖĆ ņäżĻ│äļź╝ ņ£äĒĢ┤ FMEA ļČäņäØņØä ĒåĄĒĢśņŚ¼ ņ×Āņ×¼ļÉ£ Ļ│Āņןļ¬©ļō£ļź╝ ņŗØļ│äĒĢśĻ│Ā ņ£äĒŚśļÅäļź╝ ņĄ£ņåīĒÖö ĒĢĀ ņłś ņ׳ļŖö ļīĆņØæ ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśņśĆļŗż. ņ×ÉņäĖĒĢ£ ļé┤ņÜ®ņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.
(1) ņÜ┤ņÜ® ņŗ£ļéśļ”¼ņśżņŚÉ ļö░ļźĖ ĒĢäņÜöĒĢ£ ņäĀņāü ņŗ£ņŖżĒģ£ņØĆ ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØä ļ│┤Ļ┤ĆĒĢĀ ņłś ņ׳ļŖö ļØ╝ņØ┤ņĀĆļ×Ö, ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņäżņ╣ś/ĒĢ┤ņ▓┤ļź╝ ņ£äĒĢ£ ļ¼ĖĒÆĆ ĒāĆņøī, ņäĀņāüņĢĢļĀźĻ░ĢĒĢśļ░░Ļ┤Ć, ļŗ©Ļ┤┤ļČäļ”¼ĒÜīņłś ļ░Å ĒĢ┤ņłśļ░░ņČ£ ņŗ£ņŖżĒģ£ņØ┤ļŗż. ļśÉĒĢ£ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņĀäņ▓┤ļź╝ ņÜ┤ņÜ®ĒĢĀ ņłś ņ׳ļŖö ņäĀņāü ĒåĄĒĢ®ņÜ┤ņÜ®ņŗ£ņŖżĒģ£, Ļ│ĀņĢĢ ņĀäļĀź Ļ│ĄĻĖēņØä ņ£äĒĢ£ ņäĀņāüļ░£ņĀäĻĖ░ ļ░Å ņŚäļ╣īļ”¼ņ╗¼-ņ£łņ╣ś(2ļīĆ, ļ▓äĒŹ╝ ļ░Å ĒÄīĒöäņÜ®), ņ¢æĻ┤æĒÄīĒöä ĻĄ¼ļÅÖ ņØĖļ▓äĒä░Ļ░Ć ĒĢäņÜöĒĢśļŗż. ņØ┤ņŚÉ ļīĆĒĢ£ ņĀüņĀłĒĢ£ ņĀ£ņøÉĻ│╝ ņÜöĻĄ¼ ņé¼ĒĢŁļōżņØä ņĀĢņØśĒĢśņśĆļŗż.
(2) ņäĀņāü ņŗ£ņŖżĒģ£ļōżņØś ņ£äĒŚśļÅä ļ░Å ĻĖ░ļŖźņØä ĻĖ░ļ░śņ£╝ļĪ£ ņäĀļ░Ģ ļé┤ ļ░░ņ╣śļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. ĒÖöņ×¼, ĒÅŁļ░£ ļō▒ņØś ņ£äĒŚśļÅäĻ░Ć Ēü░ ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ┤ņä£ļŖö ņäĀļ»ĖņŚÉ ļ░░ņ╣śĒĢśĻ│Ā ĻĖ░ļŖźņĀüņ£╝ļĪ£ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņ¦ä/ĒÜīņłśņÖĆ Ļ┤ĆļĀ©ļÉ£ ĻĖ░ļŖźņØä ļ¼ĖĒÆĆ ņŻ╝ļ│ĆņŚÉ ļ░░ņ╣śĒĢśņśĆļŗż. ļśÉĒĢ£ ņ×æņŚģņ×ÉņØś ļÅÖņäĀĻ│╝ ņ×æņŚģņŗ£ļéśļ”¼ņśż ņāü ļÅÖņŗ£ņŚÉ ļ░£ņāØĒĢśņ¦Ć ņĢŖļŖö ņŗ£ņŖżĒģ£ļōżņØä ļ░░ņ╣śĒĢśņŚ¼ ņ£äĒŚśļÅäļź╝ ņĄ£ņåīĒÖö ĒĢśņśĆļŗż.
(3) FMEA ĻĘĖļŻ╣ņØä ĻĄ¼ņä▒ĒĢśĻ│Ā ĒÜīņØśļź╝ ĒåĄĒĢ┤ ņ¢æĻ┤æņŗ£ņŖżĒģ£ ņŗżņ”Øņŗ£ĒŚśņØä ņ£äĒĢ£ ļ¬©ļōĀ Ļ│Āņןļ¬©ļō£ļź╝ ņŗØļ│äĒĢśņśĆļŗż. FMEA ļČäņäØ Ļ▓░Ļ│╝, ņ¢æĻ┤æņŗ£ņŖżĒģ£ņØś ņ¦ä/ĒÜīņłś ņ×æņŚģ ņżæ ņןļ╣ä ņČ®ļÅī, ļ¼ĖĒÆĆ Ļ▓īņØ┤ĒŖĖ ļĀłņØ╝ ņØ┤Ēāł, ĒĢśņżæņŚÉ ņØśĒĢ£ ĒīīņåÉ ļ░Å ļ│ĆĒśĢ, ļŗ©Ļ┤┤ ĒÜīņłś ņŗ£ņŖżĒģ£ņØś ļ¦łņ░░ ļ░Å ņØ┤ļ¼╝ņ¦łļĪ£ ņØĖĒĢ£ ļłäņłś ļśÉļŖö ņ×æļÅÖ ļČłļŖźņØś Ļ│Āņןļ¬©ļō£Ļ░Ć ļ░£ņāØ ĒÖĢļźĀņØ┤ ļåÆņØĆ Ļ▓āņ£╝ļĪ£ ĒīīņĢģļÉśņŚłļŗż. ļåÆņØĆ ĒÖĢļźĀņØś Ļ│Āņןļ¬©ļō£ņŚÉ ļīĆĒĢ┤ņä£ļŖö ņÜ┤ņÜ® ĒÖśĻ▓Į Ļ░ĆņØ┤ļō£ļØ╝ņØĖ ĻĄ¼ņČĢ, ĻĄ¼ņĪ░ ļ│ĆĻ▓Į, ĻĄ¼ņĪ░ ļČłļ¤ē Ļ▓Ćņé¼ ņŗ£ņŖżĒģ£ ĻĄ¼ņČĢ, ņ£äĒŚś Ļ░Éņ¦Ć ĒöäļĪ£ņäĖņŖż ņČöĻ░Ć ļ░Å ņ×æņŚģņ×ÉņØś Ļ░Éņŗ£ ļśÉļŖö Ļ░üļ│äĒĢ£ ņŻ╝ņØś ļō▒ņØś ĒśĢĒā£ļĪ£ ļ░®ņĢłņØ┤ ļ¦łļĀ©ļÉśņŚłĻ│Ā ņØ┤ļź╝ ņāüņäĖ ņäżĻ│äņŚÉ ļ░śņśüĒĢśņśĆļŗż.
ļ│Ė ņŚ░ĻĄ¼ Ļ▓░Ļ│╝ļź╝ ļ░öĒāĢņ£╝ļĪ£ 2015ļģä 11ņøöņŚÉ ņä▒ļŖź ņŗżņ”Ø ņŗ£ĒŚśņØä ņ£äĒĢ£ ņäĀņāü ĻĄ¼ņĪ░ļ¼╝ņØ┤ ņĀ£ņ×æļÉśņŚłĻ│Ā ņØĖļ¬ģ ņé¼Ļ│Ā ļ░Å ņŗ£ņŖżĒģ£ņØś Ļ▓░ĒĢ© ņŚåņØ┤ ņŗ£ĒŚśņØä ņä▒Ļ│ĄņĀüņ£╝ļĪ£ ņłśĒ¢ēĒĢśņśĆļŗż. ņØ┤ļŖö ņĄ£ĻĘ╝ ĒĢ┤ņ¢æĒöīļ×£ĒŖĖ ņé░ņŚģņŚÉņä£ ņżæņÜöņŗ£ ļÉśĻ│Ā ņ׳ļŖö ņĀäļŗ©ņäżĻ│ä(FEED, front engineering end design) Ļ░£ļģÉņØ┤ļ®░ ņĢäņ¦ü ņĀĢļ”ĮļÉśņ¦Ć ņĢŖņØĆ ņāłļĪ£ņÜ┤ ņŗ£ņŖżĒģ£ņØä ņäżĻ│äĒĢśļŖö ļ░®ļ▓ĢļĪĀņ£╝ļĪ£ ņĀüĒĢ®ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ĻĘĖ ĒÜ©ņÜ®ņä▒ņØ┤ Ēü¼ļŗż. ļśÉĒĢ£ ļ│Ė ņäżĻ│äņÖĆ ņÜ┤ņÜ® Ļ▓ĮĒŚśņØĆ Ē¢źĒøä ņŗĀņé░ņŚģņØ┤ ļÉĀ ĒĢ┤ņ¢æĻ┤æļ¼╝Ēöīļ×£ĒŖĖņØś ņé░ņŚģĒÖö Ļ░£ļ░£ņŚÉ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ļŗżĻ│Ā ĒīÉļŗ©ļÉ£ļŗż.




