코안다 시스템이 장착된 안정기용 핀의 성능해석
Performance Analysis of Stabilizer Fin Applied Coanda System
Article information
Abstract
Stabilizer fins are installed on each side of a ship to control its roll motion. The most common stabilizer fin is a rolling control system that uses the lift force on the fin surface. If the angle of attack of a stabilizer fin is zero or the speed is zero, it cannot control the roll motion. The Coanda effect is well known to generate lift force in marine field. The performance of stabilizer fin that applies the Coanda effect has been verified by model tests and numerical simulations. It was found that a stabilizer fin that applied the Coanda effect at Cj = 0.085 and a zero angle of attack exactly coincided with that of the original fin at α = 26°. In addition, the power needed to generate the Coanda effect was not high compared to the motor power of the original stabilizer fin.
1. 서 론
파도가 있는 해역을 운항하는 선박은 6자유도 운동을 갖게되며, 이중 횡 동요 운동이 심해지면, 선박의 항해나 설치기기에 문제가 야기될 뿐만 아니라 탑승한 승객도 불편함을 느끼게 된다. 따라서 이러한 횡동요 운동을 감쇠시킬 수 있는 장치가 요구된다.
일반적으로 횡동요 운동을 감쇠시킬 수 있는 장치로 선체 양측면에 장착하는 빌지 킬(Bilge keel)과 핀 안정기(Stabilizer fin)가 대표적인 장치이다(Kim et al., 2000; Chae and Kim, 2003). 일정한 장소에서 머물러 작업하는 FPSO 등의 경우에는 감요탱크(Anti-rolling tank)등을 적용하기도 한다(Won et al., 2010; Ju et al. 2015). 또한 적용사례는 많지 않지만, 질량이동형 장치(Moving weight device), 타 안정기(Rudder stabilizer) 등이 있다(Moon et al., 2005).
이 중에서 핀 안정기는 파랑중 선박 운항 시 횡요 저감효율이 가장 효과적인 방법으로 알려져 있으며, 잘 설계된 핀 안정기는 최소 50% 이상 감쇠시킬 수 있는 것으로 알려져 있다(Cho and Lim, 2011; Seo et al. 2007).
핀 안정기는 선체로 유입되는 유동이 선체 양 측면에 설치된 날개형상의 안정기용 핀을 따라 흐르면서 양력이 발생하게 되고, 이러한 힘의 제어를 통해 선박의 횡동요를 감쇠하는 매커니즘을 갖는다. 따라서 지속적인 횡동요 제어힘을 얻기 위해서는 적당한 유속이 필수적이며, 또한 안정기용 핀의 설계에 있어, 날개 단면형상과 날개 면적 등이 주요한 인자이다.
일반적으로 일부 격납식형 핀 안정기를 제외하고는 대부분 선체의 양 측면에 돌출되어 있으며, 파랑에 의해 선박의 운동이 심해질 경우, 핀의 받음각을 변화시켜 일정한 제어힘(양력)을 통해 선박의 운동을 감쇠한다. 그러나 핀의 받음각이 실속각보다 커지면 실속에 의한 양력감소로 인해 선박의 운동을 효과적으로 감쇠하지 못하게 된다. 또한 고속운항에서는 선각과 안정기용 핀 사이의 틈에서 틈새 캐비테이션도 발생할 수 있다.
따라서 안정기용 핀 단면의 실속현상을 억제시키고, 선각과 안정기용 핀 사이의 틈새유동을 최소화 시키는 신개념 핀 안정기의 설계가 필요하다(Seo et al., 2008).
핀의 실속현상을 억제시키고, 양력을 획기적으로 증가시키는 방법에 관한 연구는 이미 항공분야에서 지속적으로 연구되어왔으며, 이 중 코안다 효과적용이 가장 우수한 방법으로 알려져있다(Seo, 2011).
코안다 효과는 곡면에 접선방향으로 분사된 제트유동이 물체의 곡면을 따라 표면에 밀착되어 흐르는 현상을 말한다(Gale, 1998). 즉 고속 제트 유동이 표면을 따라 밀착되어 흐르면서 주위 유동을 가속시키게 되며, 날개형상에 적용할 경우에는 양력을 발생시킬 수 있게 된다.
본 연구에서는 일반적으로 받음각을 변화시키는 핀 안정기의 작동원리와는 다르게, 고정된 받음각에서 핀의 뒷날에 접선방향으로 제트유동을 공급하는 것만으로도 기준핀에 해당하는 양력이 발생되는지 모형시험과 수치계산을 통해 조사하였다. 또한 공급되는 소요동력을 최소화하기 위해 효율적인 제트 모멘텀 계수를 찾고자 하였다.
2. 모형시험 및 수치계산
2.1 대상 핀 안정기
비교 대상 핀은 일반적으로 안정기용 핀에서 사용하는 미국항공자문위원회(NACA, National Advisory Committee for Aeronautics)의 NACA 0015 단면을 기반으로 하며, 받음각의 변화에 따라 양력이 변화하는 일반적인 안정기용 핀을 택하였으나, 코안다 효과를 효율적으로 발생시킬 수 있도록 기존 단면인 NACA 0015보다 두꺼운 NACA 0018형상으로 수정하여 연구를 진행하였다.
보다 자세히 기술하면, 고정식 핀 안정기 단면 설계에서 2차원 수치해석 결과를 바탕으로 코안다 효과를 효과적으로 발생시킬 수 있도록 기존 모형 핀의 형상을 Fig. 1과 같이 수정하였다. 먼저 제트유동이 분출되는 슬릿과 일정한 압력을 유지시키기 위한 플래넘 등의 코안다 장치를 안정기용 핀 내부에 설치하기 위해 기존의 NACA 0015단면 보다 두께가 큰 NACA 0018 단면을 선택하였으며, 날개단면의 코드(C, chord)길이를 기준으로 앞날로부터 거리가 0.3C이하인 부분은 NACA 0018형상을 따라가고, 0.3C이상인 부분은 뒷날의 원형부에서 노즐의 높이를 감안한 후 직선으로 연결하였다.
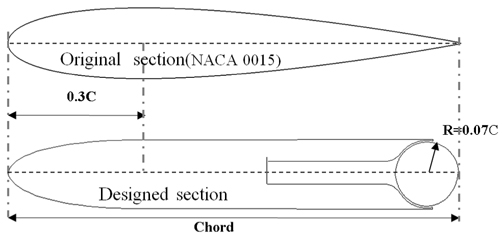
Comparison of modified fin and original fin section
코안다 효과의 발생에 주요 요인으로는 뒷날 실린더의 크기와 제트노즐의 크기이다. 뒷날 실린더의 곡률반경이 작아지면 분사된 제트 유동이 급격한 뒷날 곡면으로 인해 밀착되어 흐르지 못하게 된다. 또한 반대로 뒷날 곡률반경이 커지면, 제트 유동을 분사하지 않았을 때 뒷날에서 비대칭 보텍스가 주기적으로 발생할 가능성이 있게 된다.
본 연구에서는 2차원 수치계산을 통해 뒷날 실린더의 반경(R)은 평균 코드길이(C)의 7%가 되도록 정하고, 제트 분사 슬릿의 높이는 핀 안정기의 제작 공차 등을 고려하여 1.5mm로 택하였다. 이때 슬릿의 높이는 평균 코드로 무차원화 하면 0.005C로 항공분야에서 흔히 쓰이는 코안다 슬릿의 범위 내에 있게 된다(Park and Lee, 2000; Seo, 2011).
기존 핀과 코안다 효과를 적용한 고정식 핀의 평균 코드 및 스팬(Span)은 Table 1과 같이 각각 280mm, 150mm로 동일하며, 제트유동이 공급하는 슬릿의 높이(Hslit)는 1.5mm이다.
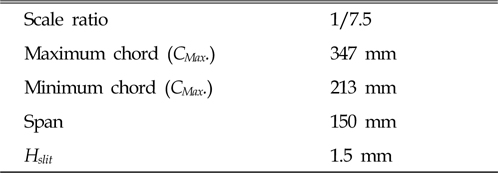
Principal particulars of modified stabilizer fin
2.2 무차원 수
모형시험에 사용된 무차원 수로 제트의 모멘텀 계수는 식 (1)과 같다.

여기서  는 질량유량(kg/s), Vjet, V∞는 슬릿을 통해 분사되는 제트 유동의 유속과 유입유속이며, S는 핀의 투영 면적이다.
는 질량유량(kg/s), Vjet, V∞는 슬릿을 통해 분사되는 제트 유동의 유속과 유입유속이며, S는 핀의 투영 면적이다.
또한 양력과 항력, 압력계수는 식 (2)와 같이 무차원화 하였다.

여기서 S는 평균 코드와 스팬의 곱으로 나타내며 ρ는 유입류의 밀도, V∞는 유입류의 유속을 나타낸다.
2.3 모형시험
Fig. 2는 모형시험에 사용된 안정기용 핀 모형을 보이고 있다. 그림과 같이 가공이 용이한 우레탄 폼을 사용하였으며, 분력계와의 취부를 위해 핀의 뿌리쪽에는 12mm의 아크릴을 사용하여 제작하였다. 또한 표면을 매끄럽게 하기 위해서 포마이카를 이용하여 코팅 처리하였다.

Stabilizer fin for model experiment
뒷날의 곡률을 주기 위한 원형 실린더는 두께 1.5mm인 PVC(Polyvinyl chloride) 파이프를 이용하여 제작하였으며, 제트유동이 분출되는 슬릿은 내부압력에 의한 변형을 억제하기 위해 세 개의 스페이서를 두어 변형을 최소화 하였다.
고정식 핀 안정기의 성능해석을 위한 모형시험은 인하대학교의 회류수조에서 이루어졌으며, 자세한 정보는 Seo(2011)을 참조한다. 고정식 핀 안정기의 모형은 1/7.5 축척이며, 안정기용 핀의 양·항력 성능을 측정하기 위해 모형의 상부에 3분력계를 설치하고, 자유수면 효과를 제거하기 위한 자유수면 막음판을 Fig. 3과 같이 구성하였다.

Photograph of the jet blowing system
또한 안정기용 핀 모형에 제트유동를 공급하기 위하여 코안다 제트 공급 시스템을 구축하였다. 이 시스템의 주요 구성은 펌프와 압력수 저장탱크, 유량계 및 압력계 등으로 구성되며, 모형의 노즐에 일정한 압력의 제트 유동을 분사하기 위해 인버터 내장용 부스터 펌프와 질소가 들어있는 100L급의 최대 압력 10bar(1MPa)의 용기를 연결하였고, 모형의 노즐로 공급되기 전의 유량을 측정하기 위해 전자식 유량계(모델명: VN-20/일본)를 추가로 장착하였다.
모형시험 조건은 유입 유동의 최대 속도와 제트 유속 및 펌프의 용량을 고려하여 Table 2와 같이 결정하였다. 모형시험 시 유입 속도는 2m/s이며 레이놀즈 수는 평균 코드를 기준으로 5.5×105이다. 이 때 다양한 제트 모멘텀을 공급하였을 경우 코안다 효과의 특성을 조사하였다. 제트 모멘텀의 변화는 총 6가지의 제트 모멘텀 계수에 대해 계측하였다.
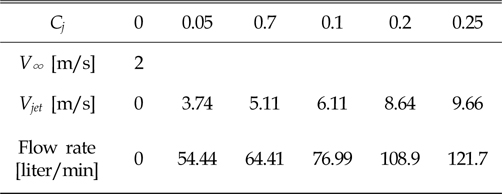
Test cases
2.4 수치계산
수치계산에 사용된 계산기는 Fluent 6.3으로 지배방정식은 유한체적법(Finite volume method)으로 차분화된다. 지배방정식은 이산화 과정을 거쳐 대수방정식으로 변환되며, 그 과정에서 확산항에는 중심 차분법, 시간에 대한 미분항에는 1차 음해법을 사용하였다. 압력방정식으로는 Rhin/Chow방법을 수정한 FLUENT의 표준 방법을 사용하였으며, 속도-압력의 연성은 SIMPLE(Semi-implicit method for pressure linked equations) 방법을 사용하였다. 또한 완화계수 값으로 압력에 대해서는 0.3, 운동량에 대해서는 0.5, 난류에 대해서는 0.5를 주었다.
Fig. 4에 보인 바와 같이 수치격자는 Gridgen Ver.15.06을 사용하여 생성하였다. 날개 뒷날 부근에서의 유동을 더욱 상세히 검토하기 위하여 3차원 계산 영역은 코드(C)로 무차원화 했을 때 -5≦X/C≦7, -4≦Y/C≦4, 0≦Z/C≦4 (X, Y, Z는 각각 Fig. 4의 좌표를 의미) 로 확장하였으며, 총 격자수는 약 10,000,000개, 슬릿 내부에는 슬릿 높이방향으로 30개의 격자를 분포시켜, 첫 노드점까지의 거리인 Y+가 1이하가 되도록 하였다.

Grid system around stabilizer fin with the Coanda effect
경계조건으로는 유입 면에서는 균일류 조건(u=1, v=w=0; u, v, w는 각각 x, y, z방향 유속)을 유출 면에서는 정압력이 일정하다는 조건을 사용하였으며 날개 표면에서는 Nonslip wall조건 (u=v=w=0)을 주었다. 또한 코안다 제트 유입구에 균일류 조건을 사용하여 슬릿에서 일정한 유량이 분사되도록 하였다.
난류 모형으로는 일반적으로 유동 박리 현상을 예측하는데 우수하고 실속 등의 성능을 정확하게 예측한다고 알려진 SST-k ⍵ 모형을 사용하였다. 격자의 대한 민감도 및 난류모형에 대해서 이전연구결과(Seo, 2011)를 참조하였다. 수치해석 조건은 실험조건과 동일하게 하여 그 결과를 직접 실험값과 비교하였다.
3. 고 찰
3.1 뒷날 형상의 영향
코안다 제트는 뒷날의 표면을 따라 흐르므로 뒷날의 형상은 코안다 효과에 큰 영향을 준다(Hong and Lee, 2004). 따라서 수치 해석은 뒷날을 다양한 형태로 설계하여 수치계산을 실시했다. 2차원 날개 단면의 뒷날 형상의 변화는 앞서 Fig. 1에서 보인바와 같이 뒷날의 형상은 단축과 장축의 비율로 정의하였다. 뒷날의 형상에 따른 양항력 성능을 비교하기 위해, 계산의 구속 조건으로 제트 모멘텀 계수는 0.1, 슬릿의 높이는 1.5mm, 받음각은 0°로 고정한 후 뒷날의 형상을 세 가지로 변경하여 수치계산을 수행하였다.
Fig. 5는 뒷날 형상에 대해 수치 계산을 수행한 한 결과이다. Fig. 5에서 보는 것과 같이 장축과 단축의 비가 1인 원형일 경우 뒷날 형상이 타원인 경우보다 양력 성능이 높은 것을 볼 수 있다. 이러한 이유는 Fig. 5의 뒷날 근처의 유선을 살펴보면 확인 할 수 있듯이 뒷날이 원형일 때, 분사된 제트유동이 뒷날의 표면을 가장 잘 따라 흘러, 날개 전체의 순환이 증가되었기 때문으로 판단된다. 따라서 본 연구에서 고정식 핀 안정기의 뒷날 형상은 원형으로 선정하였다.

Comparison of lift and drag coefficients at the various shapes of trailing edge (α = 0°, Cj = 0.1, Hslit = 0.005 C)
3.2 뒷날 실린더 반경의 영향
뒷날 실린더의 반경에 따른 코안다 효과의 영향을 조사하기 위해 계산의 구속조건으로 슬릿의 높이는 1.5mm, 뒷날의 형상은 원형, 받음각은 0°으로 고정하고, 뒷날의 반경에 따른 영향만을 알아보기 위해 추가적인 수치계산을 조사하였다. 이때 뒷날 원형 반경을 코드 길이의 3%, 5%, 7%로 변경하였다. 또한 실린더의 반경을 3%, 5%, 7%로 설정한 이유는 실린더의 반경이 너무 작을 경우 슬릿을 통해 나온 제트 유동이 실린더 표면을 잘 따라 가지 못할 것으로 판단하였다. 또한 실린더 반경이 7%를 넘어 갈 경우 실린더의 크기는 커지겠지만 뒷날이 NACA단면의 두께보다 크게 되어 코안다 제트를 분사하지 않을 경우 뒷날에서 비대칭 보텍스가 주기적으로 발생하여 기진력을 유발하게 될 것으로 판단하였다(Seo and Lee, 2011).
Fig. 6은 뒷날 실린더 반경에 대해 수치 계산 한 결과이다. 그림에서 보는바와 같이 뒷날 실린더 반경의 크기(R)를 코드 길이의 0.03C에서는 0.05C, 0.07C에 양력이 비해 낮게 나온 것을 확인 할 수 있다. 뒷날 반경이 0.03C의 경우 분사된 제트 유동의 유선을 살펴보면 뒷날 원형의 곡률을 잘 따라가지 못하고 박리되는 것을 볼 수 있다. 이로 인해 날개 전체의 순환이 크게 발생되지 못한 것을 알 수 있다.
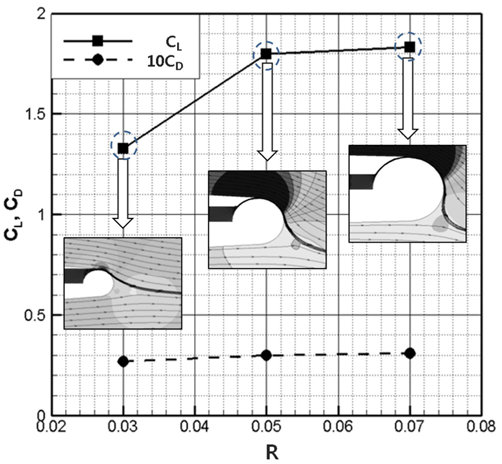
Comparison of lift and drag coefficients at the various radii of trailing edge (α = 0°, Cj = 0.1, Hslit = 0.005 C)
뒷날 반경이 0.05C와 0.07C에서는 양력과 항력이 큰 차이를 보이지 않고 수렴하는 것을 확인 할 수 있다. 따라서 본 연구에서는 제작을 위한 공차, 플래넘 및 코안다 제트 및 관로 등의 설치를 고려하여, 뒷날의 반경을 0.07C로 정하였다.
3.3 제트 모멘텀(Cj)의 영향
코안다 효과를 핀 안정기에 적용하기 위하여 제트 모멘텀의 변화에 대하여 효과적으로 양력 성능이 증가하는지 조사할 필요가 있다. 대상 모형은 2차원 수치계산을 통해 얻어진 결과를 바탕으로 뒷날의 형상은 원형으로 하였고, 뒷날 반경은 0.07C로 하여, 다양한 제트 모멘텀에 따른 양력 성능을 조사하였다. 제트 모멘텀의 범위는 0~0.4까지 다양한 영역에 대해 수치계산을 수행하였다.
Fig. 7은 다양한 제트 모멘텀을 공급하였을 때, 받음각 0°에서 발생된 양력성능을 보이고 있다. 고정식 핀 안정기의 양력성능은 제트 모멘텀 계수(Cj)가 0.1 근처에서 변화하는 것을 볼 수 있다. 이러한 경향은 타장치에 코안다 효과를 적용한 Seo(2011)의 논문에서와 같이, 제트 모멘텀이 0.1이하에서는 제트유동이 뒷날의 둥근 표면을 따라 흐르면서, 흡입면 경계층유동의 속도를 크게 증가시켜 양력이 크게 발생된 것으로 보인다. 그러나, 상대적으로 제트 모멘텀이 0.1보다 클 경우, 제트 유동의 속도가 매우 커져, 경계층 내부 유동을 효과적으로 증가시키지 못하는 것으로 나타나, 상대적으로 양력증가폭은 줄어든 것으로 보인다. 따라서 공급된 제트 모멘텀을 고려한다면, 코안다 효과의 효율은 제트 모멘텀이 0.1근처일 때 최대가 된다.

Lift coefficients at the various jet momentum (α = 0°, Cj = 0.1, Hslit = 0.005 C)
3.4 기존 핀 안정기와의 비교 검토
일반적으로 선속이 증가하면 횡 동요가 줄어들고 핀에서 발생하는 양력도 증가하기 때문에 핀 안정기의 작동범위는 Fig. 8과 같이 선속에 따라 달라진다. 연구대상의 기존 핀 안정기는 선속 15kts(7.72m/s)이하에서는 26°까지 받음각을 변화시켜 횡 동요를 제어하지만, 15kts이상으로 선속이 증가하면 핀 안정기의 받음각은 점차 감소하여 25kts(12.86m/s)에서는 9°가 되며, 30kts(15.43m/s)이상에서는 핀 안정기를 작동 시키지 않는다.

Maximum angles of attack of the stabilizer fin for various ship speeds (Seo et al., 2008)
기준 안정기용 핀은 Fig. 9와 같이 받음각 30°까지 양력성능이 선형적으로 증가하다가 실속이 발생되는 것으로 나타났다. 그러나 기준 안정기용 핀의 최대 운용 받음각은 26°이므로 실속이 발생되지 않는 범위 내에서 작동되는 것으로 보이며, 최대 운용 받음각에서 양력계수는 약 0.9정도이다.
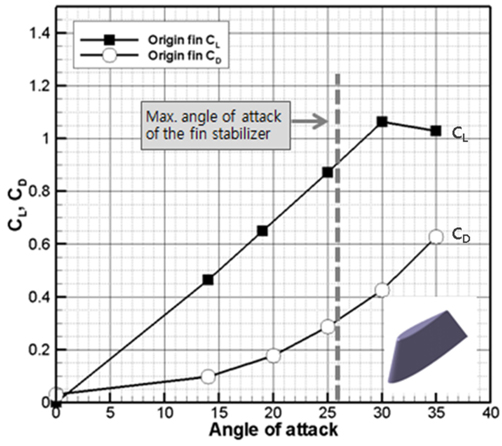
Experimental results of a original stabilizer fin at Rn = 2.1 × 106 (Seo and Lee, 2011)
Fig. 10은 본 연구의 실험 및 수치계산 결과로써, 받음 각을 변화시키는 핀 안정기와는 다르게 받음각을 0°로 고정시켜 놓고, 슬릿을 통해 분사되는 제트 모멘텀을 0에서부터 0.25까지 변화시켜 계측한 양·항력성능을 나타낸다. 그 결과 코안다 효과를 적용한 핀 안정기의 경우 받음각이 0°인 조건에서도 코안다 제트를 분사할 경우 양력이 크게 발생되는 것을 알 수 있다.

Comparison of lift and drag coefficients at the various jet momentum coefficient (Rn = 5.5 × 105, ⍺ = 0°)
받음각을 변화시키는 기존 핀 안정기와 양력성능을 비교하면, 제트 모멘텀 계수가 약 0.085근처에서 받음 각을 변화시키는 핀 안정기의 최대 작동 각(26°)에서 발생되는 양력 크기에 해당되는 것으로 나타났다. 즉 받음각을 변화시켜 횡 동요를 제어하는 핀 안정기와 달리 받음각을 고정시킨 상태에서 코안다 제트유동을 제어하는 것만으로도 동일한 횡동요 제어 성능을 가지는 것으로 나타났다. 즉 받음각 변화로 양력 성능을 변화시켜 횡동요를 감쇠시키는 핀 안정기와는 달리 코안다 효과를 이용한 핀 안정기의 경우 핀을 고정시킨 상태에서 제트 유동의 변화를 통해 양력 성능을 제어할 수 있다. 제트 모멘텀 계수인 Cj = 0.12에서 받음각을 변화시키는 핀 안정기의 최대 양력과 동일한 양력이 얻어지는 것을 확인 할 수 있다.
또한 항력을 비교해 본 결과 각각의 양력에서의 항력값이 기존 핀과 유사하거나 오히려 더 낮게 나오는 것을 확인 할 수 있다. 그러므로 제트 유동을 통하여 양력 성능도 증가하면서 항력은 기존보다 개선된다. 그리고 기존 핀 안정기는 Fig. 9에 나타난 것과 같이 받음각 30°에서 실속현상이 나타나는 것을 확인 할 수 있다. 그러나 코안다 효과를 적용한 고정식 핀 안정기는 Fig. 10에서 보는 것과 같이 Cj가 증가 하더라도 받음각을 변화시키는 핀 안정기와는 달리 양력이 지속적으로 증가하는 것을 확인 할 수 있다. 또한 최대 양력 계수는 받음각을 변화 시키는 핀 안정기의 경우 약 1.05이지만 코안다 효과를 적용 할 경우 최대 양력 계수가 약 1.25로 받음 각을 변화시키는 핀 안정기에 비해 높은 양력 성능을 나타내는 것을 확인 할 수 있다.
3.5 소요동력 추정
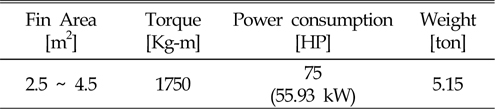
코안다 효과를 적용한 고정식 핀 안정기의 경우 슬릿을 통해 제트유동을 분사하여 양력을 발생시키는 방법이기 때문에 물을 공급할 수 있는 펌프의 동력을 계산하여, 기존 핀 안정기와의 소요마력을 비교하였다. 우선 비교 대상으로는 국내에서 상용화된 능동형 핀 안정기를 선정하였다. 상용 핀 안정기 중 핀의 투영 면적이 비슷한 핀 안정기를 기준으로 택하였으며, 핀을 구동하기 위한 소요마력은 Table 3과 같이 75HP(55.93kW)임을 확인 할 수 있다(Lee, 2014).
펌프의 소요 동력은 펌프가 가한 수두(hp)와 분사된 유량(Q)의 함수로 식 (3)과 같이 표현된다.

여기서, γ는 물의 비중량이며, Q는 공급된 제트유량, ƞT는 펌프의 효율로서 Seo(2011)을 참조하여 0.65로 정하였다.
펌프가 가한 수두(hp)는 유입구와 토출구의 정압력에 의한 수두차(z2 − z1)와 제트 유동을 공급하기 위한 동 압력차(p2 − p1), 유입구와 토출구의 중력의 영향이 고려하고, 마지막으로 관내 마찰 및 곡관 또는 관내 축소 또는 확장 등으로 표현되는 손실항(Σhl)을 포함하여, 식 (4)와 같이 계산하였다

여기서 hp는 펌프의 소요마력이며, hl은 손실수두, v는 유입유속과 제트유동의 속도이다.
코안다 효과를 이용한 핀 안정기의 경우 최대 제트 모멘텀 0.085를 기준으로 펌프의 소요 마력을 계산한 결과 약 67HP(49.96kW)로 추정되었다. 이는 기존 핀 안정기와 코안다 효과를 적용한 고정식 핀 안정기와 소요 마력을 비교해 보면, 기존 핀 안정기에 비해 소요 동력이 약 11% 감소되는 것으로 나타났다.
4. 결 론
본 연구는 받음각의 변화에 따라 횡동요를 제어할 수 있는 기존의 핀과 달리 받음각 0°에서 뒷날의 슬릿으로 공급하는 제트 모멘텀의 변화만으로 기대하는 성능이 발생되는가를 모형시험과 수치계산을 통해 조사하였으며, 기존 핀 안정기와의 소요마력을 비교분석하였다.
그 결과 뒷날에서 분사된 제트유동의 회전각은 공급된 제트 모멘텀이 증가할수록 커지는 경향이 나타났으며, 이로 인한 순환증가로 핀 안정기의 양력성능을 증가시킨 것으로 나타났다.
두 번째로, 코안다 효과를 적용한 핀 안정기의 경우 제트 모멘텀 계수가 약 0.085일 때, 기존 핀 안정기의 최대 작동각(26°)에서 발생되는 양력의 크기와 동일하게 발생되는 것으로 나타났다. 즉 받음각을 변화시키지 않고, 코안다 효과를 이용하여, 제트유량을 제어하는 것만으로도 횡 동요를 억제시킬 수 있을 것으로 보인다.
마지막으로, 국내에서 상용화된 능동형 핀 안정기와 고정식 코안다 핀안정기의 소요동력을 비교한 결과 고정식 핀안정기의 소요동력이 기존 핀 대비 약 11% 감소되는 것을 확인 하였다.
향후 PIV(Particle image velocimetry)를 이용한 유동가시화 시험을 통하여 코안다 효과를 적용한 고정식 핀안정기의 성능 향상 및 개선에 대한 연구를 수행할 예정이다.
Acknowledgements
본 연구는 정부(교육과학기술부)의 재원으로 한국연구재단 기초연구사업의 지원을 받아 수행된 연구임을 밝힙니다(NRF-2010-0025497, NRF-2014R1A1A2059291).
References
Chae, G.H., Kim, Y.B., 2003. An Experimental Study on the Rolling Motion Control of a Ship Based on LMI Approach. Journal of Ocean Engineering and Technology, 17(2), 60-66.
Chae G.H., Kim Y.B.. An Experimental Study on the Rolling Motion Control of a Ship Based on LMI Approach. Journal of Ocean Engineering and Technology 2003;17(2):60–66.Cho, C.J., Lim, K.Y., 2011. A Digital Fin Stabilizer Controller Design for Reduction of Ship Rolling in Waves. Proceedings of the KIEE Conference, 1742-1743.
Cho C.J., Lim K.Y.. A Digital Fin Stabilizer Controller Design for Reduction of Ship Rolling in Waves In : Proceedings of the KIEE Conference; 2011. p. 1742–1743.Cho, S.K., Hong, S.Y., Jang, T. S., 2004. Experiment and Simulation Study on Performance and Design of Fin-Stabilizer. Journal of the Society of Naval Architects of Korea, 41(6), 1-7.
Cho S.K., Hong S.Y., Jang T. S.. Experiment and Simulation Study on Performance and Design of Fin-Stabilizer. Journal of the Society of Naval Architects of Korea 2004;41(6):1–7.Hong, S.J., Lee, S.H., 2004. A Study on the Flow Characteristics around a Conada Control Surface. Journal of the Society of Naval Architects of Korea, 8(2), 13-19.
Hong S.J., Lee S.H.. A Study on the Flow Characteristics around a Conada Control Surface. Journal of the Society of Naval Architects of Korea 2004;8(2):13–19.Gale, M.C., 1998. Stop Abusing Bernoulli! -How Airplanes Really Fly. Regenerative Press.
Gale M.C.. Stop Abusing Bernoulli! -How Airplanes Really Fly Regenerative Press; 1998.Jin, H.Z., Yu, W., Qi, Z.G., Jin, G., 2006. Study on lift generation of Weis-Fogh Flapped Fin Stabilizer at Zero Speed. SICE-ICASE International Joint Conference. 1521-1524.
Jin H.Z., Yu W., Qi Z.G., Jin G.. Study on lift generation of Weis-Fogh Flapped Fin Stabilizer at Zero Speed In : SICE-ICASE International Joint Conference; 2006. p. 1521–1524.Ju Y., Kim Y.J., Ha, Y., 2015. Experimental Study on the Period Control of an U-tube Type Anti-Rolling Tank by using a Double Layer Duct. Journal of the Society of Naval Architects of Korea, 52(2), 135-142.
Ju Y., Kim Y.J., Ha Y.. Experimental Study on the Period Control of an U-tube Type Anti-Rolling Tank by using a Double Layer Duct. Journal of the Society of Naval Architects of Korea 2015;52(2):135–142. 10.3744/SNAK.2015.52.2.135.Kim, Y.B., Byun, J.H., Yang, J.H., 2000. An Experimental Study on the Development of the Anti-Rolling Control System for a Ship. Journal of Ocean Engineering and Technology, 14(4), 43-48.
Kim Y.B., Byun J.H., Yang J.H.. An Experimental Study on the Development of the Anti-Rolling Control System for a Ship. Journal of Ocean Engineering and Technology 2000;14(4):43–48.Lee, S.J., 2014. A Study on the Lift Augmentation of a Fixed Type Fin Stabilizer with Coanda Effect. Master’s Thesis, Inha University, Korea.
Lee S.J.. A Study on the Lift Augmentation of a Fixed Type Fin Stabilizer with Coanda Effect, Master’s Thesis Inha University; Korea: 2014.Moon, S.J., Jeong, J.A., Yoon, H.K., Lee, G.J., Ann, S.P., 2005. An Experimental Study on Mass Driving Anti-Rolling System for Ships. Journal of the Society of Naval Architects of Korea, 42(6), 666-672.
Moon S.J., Jeong J.A., Yoon H.K., Lee G.J., Ann S.P.. An Experimental Study on Mass Driving Anti-Rolling System for Ships. Journal of the Society of Naval Architects of Korea 2005;42(6):666–672. 10.3744/SNAK.2005.42.6.666.Park, J.J., Lee, S.H., 2000. A Numerical Study on a Circulation Control Foil using Coanda Effect. Journal of the Society of Naval Architects of Korea, 37(2), 70-76.
Park J.J., Lee S.H.. A Numerical Study on a Circulation Control Foil using Coanda Effect. Journal of the Society of Naval Architects of Korea 2000;37(2):70–76.Seo, D.W., Jeong, S.W., Lee, S.H., 2007. Influence of Tail Blades on the Performance of a Fin. Journal of the Society of Naval Architects of Korea, 44(2), 55-63.
Seo D.W., Jeong S.W., Lee S.H.. Influence of Tail Blades on the Performance of a Fin. Journal of the Society of Naval Architects of Korea 2007;44(2):55–63. 10.3744/SNAK.2007.44.2.055.Seo, D.W., Kim, J.H., Lee, S.H., 2008. On the Influence of End Plates upon the Tip Vortex Cavitation Characteristics of a Fin Stabilizer. Journal of the Society of Naval Architects of Korea, 45(1), 18-28.
Seo D.W., Kim J.H., Lee S.H.. On the Influence of End Plates upon the Tip Vortex Cavitation Characteristics of a Fin Stabilizer. Journal of the Society of Naval Architects of Korea 2008;45(1):18–28. 10.3744/SNAK.2008.45.1.18.Seo, D.W., Lee, S.H., 2011. A Numerical Study for Design of a Fixed Type Fin Stabilizer Utilizing the Coanda Effect. Journal of the Society of Naval Architects of Korea, 48(2), 113-120.
Seo D.W., Lee S.H.. A Numerical Study for Design of a Fixed Type Fin Stabilizer Utilizing the Coanda Effect. Journal of the Society of Naval Architects of Korea 2011;48(2):113–120. 10.3744/SNAK.2011.48.2.113.Seo, D.W., 2011. A Study on the Performance of a High Lift Marine Rudder Implementing the Coanda Effect. Doctoral Thesis, Inha University, Korea.
Seo D.W.. A Study on the Performance of a High Lift Marine Rudder Implementing the Coanda Effect, Doctoral Thesis Inha University; Korea: 2011.Won, M.C., Ryu, S.H., Choi, K.S., Jung, Y.H., Lew, J.M., Ji, Y.J., 2010. Development of Control System for Anti- Rolling Tank of Ships with Fault Detection Capability. Journal of Ocean Engineering and Technology, 24(3), 64-71.
Won M.C., Ryu S.H., Choi K.S., Jung Y.H., Lew J.M., Ji Y.J.. Development of Control System for Anti- Rolling Tank of Ships with Fault Detection Capability. Journal of Ocean Engineering and Technology 2010;24(3):64–71.