강제선회시험을 이용한 수중운동체의 유체력 미계수 추정
Prediction of Hydrodynamic Coefficients for Underwater Vehicle Using Rotating Arm Test
Article information
Abstract
In this study, hydrodynamic coefficients were obtained from a Rotating Arm (RA) test, which is one of the captive model tests used to provide accurate coefficients in the control motion equation of an underwater vehicle. The RA test was carried out at the RA facility of ADD (Agency for Defense Development), and the forces and moments acting on the underwater vehicle were measured using a six-axis waterproof gage. A multiple regression analysis was used in the analysis of the measured data. The experimental results were also verified by comparison with the theoretical values of the previous linear coefficients. In addition, the stability indices in the horizontal plane were calculated using the linear and nonlinear coefficients, and the dynamic stability of the underwater vehicle was estimated to have a good dynamic performance with a depth ratio of 6.0.
1. 서 론
일반적으로 설계 초기단계에서 6자유도 수중운동체의 안정성 및 조종성능을 예측하기 위한 기법들은 수중운동체의 유체동역학적 능력을 최적화하는데 있어 필수적인 요소가 된다. 수중운동체의 이동궤적과 조종성능을 추정하기 위한 시뮬레이션의 요구조건은 순간속도, 가속도 그리고 제어판 변위의 함수로 구성되는 수중운동체에 작용하는 유체동역학적 힘과 모멘트에 대한 정보이다. 이러한 힘과 모멘트는 수중운동체에 수평 및 수직 연성운동을 부여하는 강제동요(PMM, Planar motion mechanism) 시험과 강제선회(RA, Rotating arm) 시험 등으로부터 얻을 수 있다(Jung et al., 2014; Kim et al., 2012). 이러한 모형시험들 가운데 특히 각속도에 관련된 유체력 미계수를 정밀도 높게 구하기 위한 대표적인 방법이 강제선회시험, 즉 회전팔 시험(이하 RA 시험이라 함)으로 알려져 있다. 특히, RA 시험은 각속도와 다른 운동변수들과의 비선형 교차항을 비교적 쉽게 구할 수 있으며, 편류각 및 각속도에 대한 유체력을 동시에 획득할 수 있는 장점이 있다(Kim et al., 2000).
한편, 최근의 구속모형시험에 관한 국내 연구사례을 살펴보면, 수상선을 대상으로 한 구속모형시험(Yun and Kim, 2012; Shin and Choi, 2011)을 실시한 바가 있으며, 몰수체에 대한 대형제어형 예인전차 CPMC(Computerized planar motion carriage)를 이용한 구속모형시험(Kim et al., 2012)에 관한 연구를 수행한 바가 있다. 국외 문헌의 경우, 과거 미해군 소속 연구기관인 David Taylor Naval Ship Research and Development Center(DTNSRDC)에서 수행된 회전팔 시험에 관한 Feldman (1987)의 연구보고서가 있으며, 최근 논문으로는 SUBOFF 모델을 대상으로 RA 시험에 관한 수치 시뮬레이션을 수행하여 선회계수(Rotary derivative)를 추정한 Pan et al.(2015)의 논문을 찾아볼 수가 있다.
상기의 연구사례들을 종합해보면, 수중운동체 중 특히 잠수함을 대상으로 RA 시험을 수행한 연구는 상당히 보안을 요하는 특정한 연구기관에서 수행될 뿐 아직 보편화 되지 않은 연구분야이다. 또한 본 논문에서와 같이 잠수함 모형을 대상으로 RA 시험을 실시하여 유체력을 추정한 연구사례는 국내외적으로 찾아보기 드문 사례라 할 수 있다.
본 논문은 수중운동체 중 하나인 잠수함 모형을 대상으로 하였으며, 국내의 RA 시험 설비(국방과학연구소)를 이용하여 조종 유체력 미계수들을 추정하고자 하였다. 특히, 조종성능 해석에 필요한 선수동요(Yaw) 각속도 r에 관련된 유체력 미계수들을 RA 시험을 이용하여 정밀도 높게 추정하고자 하였다. 또한 수심에 따른 힘과 모멘트의 경향을 분석함으로써 잠수함 부상시 시뮬레이션에 적용되는 심도비(H/D)별 계수값에 대한 타당한 결과를 제시하고자 하였다. 최종적으로, 추정된 선형계수들을 이용하여 동안정성 지수를 산정함으로써 수중운동체의 직진 안정성도 함께 평가하였다.
2. RA 시험 장치 및 방법
2.1 RA 시험 설비
RA 시험은 모형을 일정 속도로 선회시키면서 모형에 가해지는 힘과 모멘트를 측정하여 유체력 미계수를 추정하는 시험이다. RA 시험 설비의 개념도는 Fig. 1과 같으며, Fig. 1(a)에서 좌측 끝단에 모형을 설치하고 상하 수심방향의 위치 조절 및 좌우 회전팔 길이 조절과 함께 선회운동을 부가하게 된다.

Conceptual diagram of RA facility
2.2 RA 시험 방법
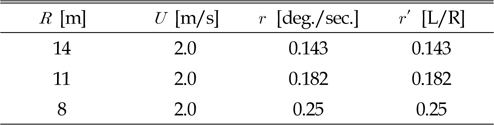
RA 시험 전 우선 분력계 센서에 대한 교정작업(Calibration)을 실시한 후 모형을 설치한다. 그리고 편류각(Drift angle)을 설정한 후, 모형을 예인하면서 일정한 속도에 도달하는 시점부터 분력계에 걸리는 힘과 모멘트를 측정한다. 힘과 모멘트는 일반적으로 모형의 시험 속도가 일정해지고 안정화되는 3사분면(시작점을 0°로 하여, 시험 구간 180°~ 270°)에서 측정한다(Fig. 1(b) 참조). 그리고 모형내의 물에 의한 원심력 보정 및 스트럿의 영향에 대한 보정도 함께 실시하여 결과해석 시 반영하였다. 이에 대한 일련의 과정을 Fig. 2에 나타내었다. 또한 접선속도는 2m/s로 고정하고, 회전팔의 길이와 편류각(Drift angle) 그리고 심도비(H/D)를 변화시켜가며 수행함으로써 총 42 케이스(Case)를 실시하였다. 회전팔 길이(R)에 따른 회전속도(r)의 변화는 Table 1에 정리하였으며, 여기서 L은 모형의 길이를 의미한다.
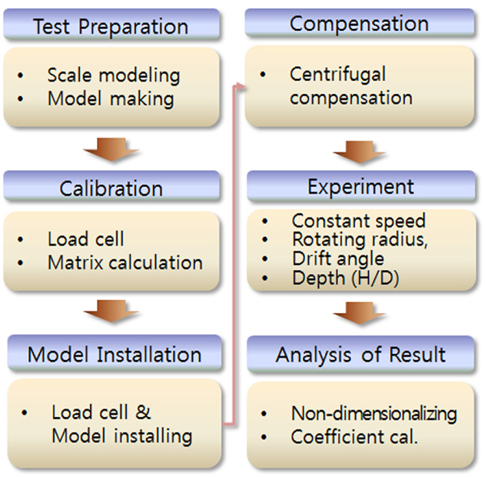
Flowchart of rotating-arm test
Test parameters
2.3 6 분력계 교정
6 분력계는 모형에 작용하는 3축에 대한 힘과 모멘트 6가지 성분을 측정하는 센서로서 모형의 내부에 장착되는 수밀형 분력계이다. 시험 전 교정 장비에서 다양한 분동(Weight)을 이용하여 각 성분별로 작용하는 힘과 모멘트를 측정한 후, 그 결과를 선형회귀분석(Linear regression analysis)함으로써 센서 전압을 힘과 모멘트로 변환하는 식을 도출한다.
즉, Fx, Fy, Fz, Mx, My, Mz 에 대하여 선형 시스템으로 모델링함으로서 변환 행렬(Kij)을 구하고 이를 이용하여 식 (1)과 같이 출력 신호행렬 {V }로부터 하중값 행렬 {F }를 산출할 수 있다

본 교정시험에서 산정된 변환행렬은 Table 2에 나타낸 바와 같으며, 본 실험에서 실제로 사용되는 힘과 모멘트는 전후동요(Surge), 좌우동요(Sway), 선수동요(Yaw)에 대한 3자유도 평면운동으로써 3분력이 사용되었다. 또한 연성이 반영된 보정 변환 행렬을 적용하여, 모형을 부착한 상태에서 3분력에 대한 하중(Weight)값과 계측값을 반복비교하였을 때 오차가 약 2%이하로 나타났다.
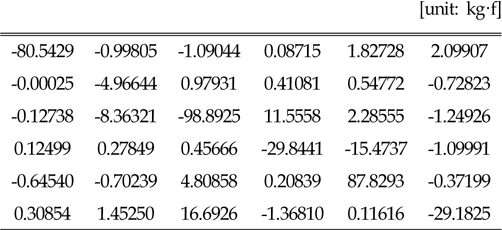
Transformation matrix [Kij]
2.4 데이터 획득 시스템
RA 시험 운동계측을 위한 데이터 획득 시스템은 2조의 PC와 무선 LAN Card를 사용한 Peer-to-peer 방식의 무선 Network 계측 시스템으로 구성되었다(Fig. 3 참조). 특히, 회전팔에 설치된 부전차(Sub-carriage)에는 PC 기반 계측 시스템을 탑재하고, 육상의 콘솔(Console)에 설치된 PC을 통해 실험 계측값을 모니터링하게 된다(Fig. 1(a) 참조). 즉, 부전차 PC로부터 계측 신호를 전송받아 화면상에서 계측과정과 데이터를 실시간으로 관측하면서 실험을 실시하였다.
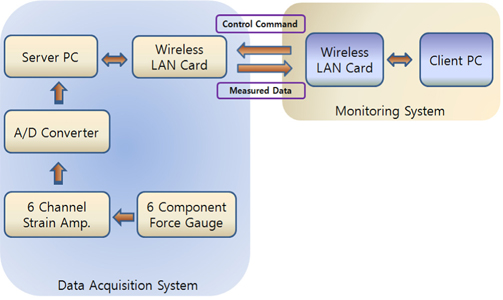
Data acquisition system
2.5 수중운동체 모형 및 설치
본 논문의 대상 모형인 수중운동체는 일반적인 잠수함 모형을 대상으로 하였고 크게 몸체와 사령탑(Conning tower) 그리고 십자형 타로 구성되어 있다. 그리고 프로펠러는 없는 상태에서 수행되었으며 시험모형의 기본제원은 Table 3과 같다.
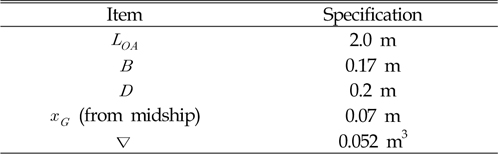
Dimension of submarine model
한편, 교정 장비를 이용하여 분력계 교정이 끝나면 스트럿을 분력계와 연결한 후, 모형 몸체 부분의 내부에 설치하고 모형의 나머지 부분도 조립함으로써 모형 전체를 완성한다. 여기서, RA 설비 3차원 입체도와 실제 수중에 잠겨있는 잠수함 모형사진을 Fig. 4 (a)와 (b)에 각각 나타내었다.

Submarine model installation
3. 수학모형 및 시험조건
3.1 조종운동 수학모형
본 실험의 좌표계는 Fig. 5와 같이 각 축에 대해 우수계를 사용하여 설정하였다.
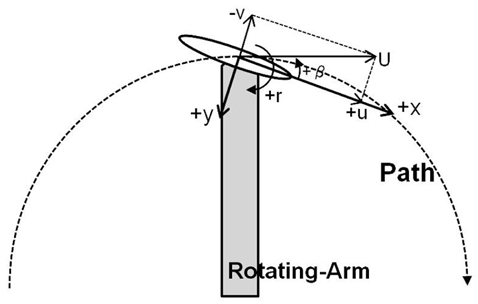
Coordinate system: right-handed system
RA 시험에 적용된 수학모형은 Gertler and Hagen(1967)이 제안한 수중운동체 표준 수학모델의 평면운동 (Surge-sway-yaw)에 관한 운동방정식이며, 식 (2)~(4)와 같이 나타내었다. 여기서 m은 모형의 질량을 의미하며, Ix, Iy, Iz는 x, y, z축에 관한 질량 관성모멘트를, xG , yG , zG 는 각각 무게중심의 x, y, z 좌표를 의미한다. 또한 u, v, w는 각각 전후동요(Surge), 좌우동요(Sway), 상하동요(Heave) 방향의 병진속도, p, q, r은 각각 횡동요(Roll), 종동요(Pitch), 선수동요(Yaw) 방향의 각속도를 의미한다. 그리고 위첨자 Dot(ㆍ) 기호는 시간미분을 나타내며, 위첨자 Prime(′) 기호는 무차원화된 계수를 의미한다. 각 계수들은 SNAME(1950)의 Prime I-system을 적용하여 무차원화하였다.



RA 시험 시 분력계에서 계측되는 힘에는 순수 유체력과 함께 모형의 질량에 의한 원심력이 포함된다. 따라서 상기의 운동방정식에서 좌변에 있는 원심력항을 우변으로 이항하여, 외력항을 다음과 같이 정리할 수 있다( 가정).
가정).



식 (5)~(7)에서 하첨자 G는 게이지(Gauge)에서 계측되는 힘과 모멘트를 의미하며, 이 식을 이용하여 회귀분석을 함으로써 유체력 미계수를 구하게 된다. 추가적으로 상기 식 (5)~(7)은 일반적인 잠수함 운동방정식인 Getler and Hagen(1967)의 수학모델에 포함된 선형계수와 비선형계수들로만 구성하여 곡선 근사화하였다.
3.2 RA 시험조건
시험은 크게 수심의 영향을 알아보기 위한 시험과 유체력 미계수 도출을 위한 시험을 구분하여 수행하였으며, 이에 대한 시험조건들은 Table 4에 함께 정리하였다. 여기서 xG는 모델의 중심으로부터 x 방향으로 무게중심의 위치를 의미한다. RA 시험에 사용된 수중운동체 모형의 경우, yG는 축에 대해 대칭이므로 무게중심의 위치는 0이 된다. 반면에 xG는 밸러스팅 결과, Midship으로부터 후방으로 0.17m로 산정되어 해석에 적용하였다. 또한 시험조건 중 심도비(H/D)의 정의는 Fig. 6에서와 같이 자유수면으로부터 수중운동체 중심까지의 길이에 대한 수중운동체 직경의 비로 나타낸다.
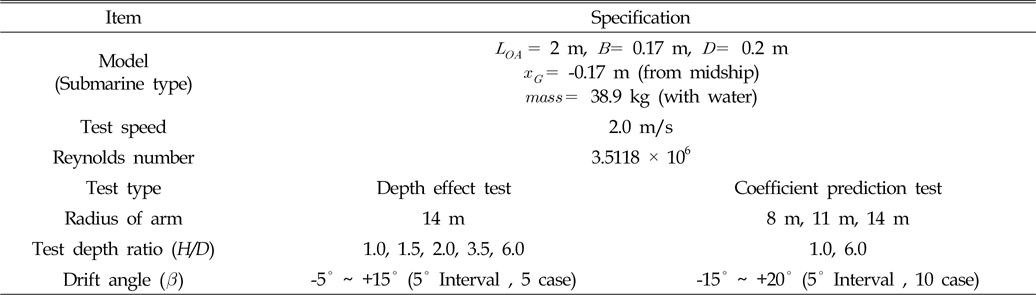
Test conditions
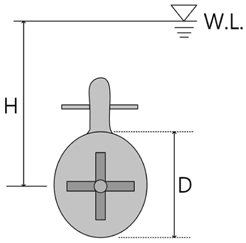
Definition of depth parameter (H/D)
4. 시험결과 및 해석
4.1 수심 영향 시험 결과 및 분석
우선 심도의 영향를 파악하기 위하여 5개의 심도와 10개의 편류각(β)에 대한 실험을 실시하였다. 회전팔 길이 R은 14m로 고정하고 선속도 U는 2.0m/s으로 설정하여 심도에 대한 경향을 분석한 후, 다음 4.2절의 계수 추정을 위한 시험에서 심도비에 대한 케이스를 정하였다.
식 (5)~(7)에 의하여 심도별 순수 유체력에 대한 실험결과를 그래프로 나타내면 Fig. 7과 같으며, 전반적으로 힘과 모멘트 결과가 심도비 3.5 이상에서 변화가 작게 나타나고 심도비 2.0 이하에서는 점점 변화가 나타나고 있다. 이를 통해 수심이 얕아질수록 자유수면의 영향을 받고 있음을 확인할 수 있다. 따라서 수중에서의 조종 시뮬레이션 수행시 수심을 심도비 3.5 이상으로 적용하는 것이 타당할 것으로 보인다.

Variation of hydrodynamic coefficient according to Depth (H/D) (R = 14 m)
한편, Fig. 7(c)에서 심도비 1.0의 경우, 모형 직경의 절반(0.1m)만 잠겨있는 상태이며, 특히 편류각이 최대인 조건(β = 15°)에서 자유수면의 영향으로 인한 계측값의 불안정성을 보여주고 있다. 따라서 유체력 미계수 도출을 위한 시험조건에서 최소 심도비 조건을 1.5로 설정함으로써 비교적 안정적인 값을 획득하여 해석에 적용하였다.
4.2 유체력 미계수 추정 결과 및 분석
본 유체력 미계수 추정 시험에서는 수심 변화가 크게 대비되는 심도비 6.0과 심도비 1.5 두 개의 실험케이스에 대한 결과를 분석하여 최종적인 유체력 미계수를 도출하였다.
Axial force 계수의 경우, 식 (5)를 이용하여 Fig. 8에서 나타낸 바와 같이 곡선 근사(Curve fitting)한 후 계수를 추정하였으며, 편류각에 따라 힘의 변화가 크게 나타남을 알 수 있다. 이는 x방향의 힘이 편류각의 변화에 따른 y방향 속도 (v)와 각속도(r)의 영향에 의한 결과로 보여진다. 따라서 외력 성분을 결정함에 있어, Gertler and Hagen(1967)이 제안한 기존 방정식에서 v, r의 고차항과 간섭항을 적용하여 무차원 유체력 미계수를 구하였다.
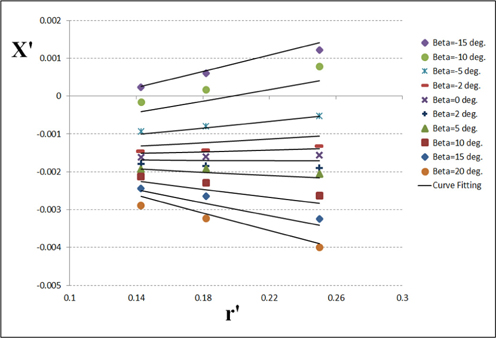
RA test results: Axial force (H/D = 6.0)
한편, Lateral force 계수의 경우, Axial force 계수 추정과 동일한 방법으로 식 (6)를 이용하여 곡선 근사한 후 계수를 추정하였으며(Fig. 9 참조), Axial force와는 달리 각각의 편류각과 회전팔 길이에 따른 무차원 각속도(r′)가 변화하여도 힘의 변화가 크지 않음을 알 수 있다. 이는 Yaw 방향 각속도(r)에 의한 영향이 작은 것으로 보이며, 반면에 편류각의 변화에 따른 유체력의 변화는 다소 크게 나타남으로 Lateral force 방향의 속도(v)에 의한 영향이 나타나는 것을 알 수 있다.
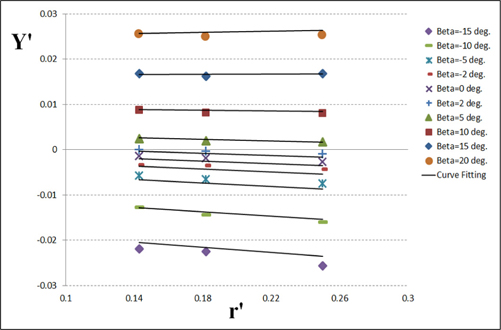
RA test results: Lateral force (H/D = 6.0)
Yawing moment의 경우, 식 (7)에 의해 곡선 근사를 하면 Fig. 10과 같이 편류각과 회전팔 길이에 따른 무차원 각속도(r′)의 변화에 따라 힘의 변화가 나타남을 보여준다. 이는 각 r′에 대해서 β가 변화하는 경우, N′가 일정하게 변화한다면, 각각의 운동이 N′에 미치는 영향이 적지 않음을 시사한다. 그리고 Yaw 방향 각속도(r)와 Lateral force 방향의 속도(v)에 의한 간섭효과는 Yv|r|′, Nv|r|′의 크기로 나타날 것이다.
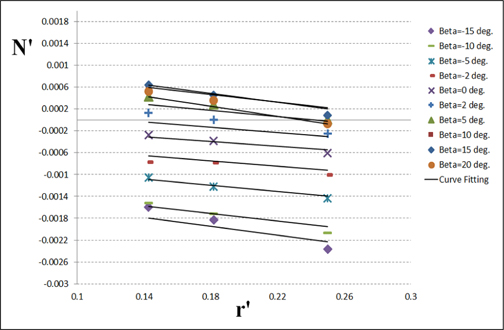
RA test results: Yawing moment (H/D = 6.0)
상기와 같이 계측된 힘과 모멘트를 다중회귀분석하여 추정된 심도별(H/D=6.0, 1.5) 유체력 미계수들을 최종적으로 Table 5에 정리하였다. 여기서 질량의 무차원값(m′)은 0.0097, x방향 중심 위치(x′G)는 –0.085를 적용하였다. Table 5로부터 두 개의 심도비에 대한 유체력의 차이가 나타나며 이는 수심 차이에 따른 자유수면의 영향으로 보인다.
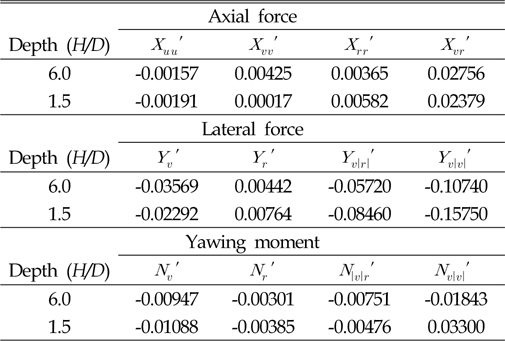
Results of hydrodynamic coefficients
Table 5에서 Xvv′의 경우, 일반적으로 어뢰와 같은 타원 형상에 대하여 음수값을 가지나, 형상에 따라 양수값을 나타내기도 한다. 본 실험과 같이 잠수함 모형의 경우, Xvv′ 가 양수의 값을 나타내고 있으며, 이것은 코닝타워에서의 양력(Lifting Force)이 앞으로 향하는 성분을 만드는 것으로 판단된다.
4.3 선형 계수 결과의 검증
본 RA 시험의 선형계수 결과에 대한 검증을 위해 계수 타당성을 평가하였다. 평가 방법은 본 논문의 잠수함 모델 형상과 유사하고 이론적 계산결과를 제시한 Shin(2007)의 결과와 비교·평가하였으며, 그 결과를 Table 6과 Fig. 11에 나타내었다. Yr′의 경우 다소 차이가 있으나 전반적으로 유사한 경향을 나타내므로 RA 시험에 의한 유체력 계수 추정결과가 타당함을 보여주고 있다.
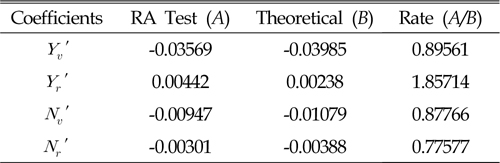
Comparison of linear coefficient results
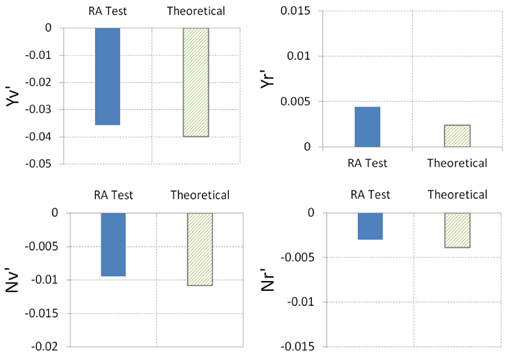
Comparison of linear hydrodynamic coefficients
5. 수평면 동안정성 해석
제어가 없는 경우의 동적 안정성(Dynamic stability)은 Sway-yaw 선형 방정식의 응답해석을 통해 수평면의 안정성 지수를 식 (8)과 같이 Gh로 표현되며, 이때의 동적 안정성은 Gh > 0을 요구한다(Feldman, 1995). 본 논문에서는 동안정성 해석을 위해 Table 5에 정리된 심도 6.0과 1.5의 선형계수 결과를 이용하여 수평면에 대한 동안정성을 평가하였다.

따라서 본 시험의 수중운동체 모형에 대한 동적 안정성 지수는 Gh가 0.36 (H/D=6.0)과 0.68 (H/D=1.5)로 산정되었다. 따라서 안정성 지수 산정결과로부터 대상 잠수함은 수평면 동적 안정성에 대한 요구조건을 만족하는 것으로 나타났다. 또한 Feldman (1995)에 의하면 잠수함에 대한 Gh값의 적정크기는 0.2~0.4이며, 심도비 6.0의 경우 Gh가 0.36으로 적정크기 범위내에 속하는 것으로 나타났다.
추가적으로 잠수함의 고유 응답은  의 조건이 만족되어야 방향 안정성(Directional stability)이 보장된다. 본 실험결과를 이용하여 방향안정성을 계산한 결과, 1.53(H/D=6.0), 5.82(H/D=1.5)로서 양의 값을 나타내었다. 따라서 본 실험을 통해 잠수함의 방향 안정성 조건도 만족하는 것으로 나타났다.
의 조건이 만족되어야 방향 안정성(Directional stability)이 보장된다. 본 실험결과를 이용하여 방향안정성을 계산한 결과, 1.53(H/D=6.0), 5.82(H/D=1.5)로서 양의 값을 나타내었다. 따라서 본 실험을 통해 잠수함의 방향 안정성 조건도 만족하는 것으로 나타났다.
6. 결 론
본 연구는 수중운동체 중 잠수함 모형을 대상으로 강제선회 시험을 실시하였고 실험결과를 통해 얻은 결론은 다음과 같다.
(1) 국내의 회전팔 시험 장비를 이용하여 잠수함의 조종 유체력 계수들을 추정하였으며, 유사 모형에 대한 이론적인 계산치와 본 실험결과를 비교·분석한 결과, 타당한 계수값임을 확인하였다.
(2) 5개의 심도별 시험을 통해 심도비 3.5~6.0 범위에서 힘과 모멘트가 일정한 값으로 나타났으며, 조종운동 시뮬레이션을 수행할 경우, 수심의 영향을 받지 않는 심도비 3.5 이상에서 추정된 유체력 미계수를 이용하는 것이 타당할 것으로 판단된다.
(3) 수중운동체가 수면으로 급부상시 조종시뮬레이션을 수행하기 위한 심도별 유체력 계수를 추정하였고 동적 안정성 지수도 산정하였다. 산정결과, 심도비 1.5, 6.0 모두 0보다 크게 나타남으로써 동적 안정성 조건을 만족하는 것으로 평가되었다. 특히 심도비 6.0에서 잠수함의 안정성 지수에 대한 적정크기 범위 내에 속하는 것으로 나타났다.
향후 심도별 유체력 추정 실험에 있어서 더욱 다양한 수심에 따른 계수를 추정할 필요가 있으며, 추정된 조종 유체력 계수는 수중운동체의 정밀도 높은 조종성능 예측 개발에 활용될 수 있을 것으로 기대된다.
Notes
It is noted that this paper is revised edition based on proceedings of KAOSTS 2015 in Jeju.
Acknowledgements
본 논문은 부산대학교 기본연구지원사업(2년)에 의하여 연구되었으며, 연구비 지원에 감사드립니다.
References
Feldman, J., 1995. Method of Perfoming Captive-Model Experiments to Predict the Stability and Control Characteristics of Submarines. Report CRDRNSWC-HD-0393-25.
Feldman J.. Method of Perfoming Captive-Model Experiments to Predict the Stability and Control Characteristics of Submarines 1995.Feldman, J., 1987. Straightline and Rotating Arm Captive-Model Experiments to Investigate the Stability and Control Characteristics of Submarine and Other Submerged Vehicles, Report DTRC/SHD-0393-20.
Feldman J.. Straightline and Rotating Arm Captive-Model Experiments to Investigate the Stability and Control Characteristics of Submarine and Other Submerged Vehicles 1987.Gertler, M., Hagen, G.R., 1967. Standard Equations of Motion for Submarine Simulation. NSRDC-Report SR 009 01 01, TASK 0102.
Gertler M., Hagen G.R.. Standard Equations of Motion for Submarine Simulation 1967.Jung, J.W., Jeong, J.H., Kim, I.G., Lee, S.K., 2014. Experimental Study on Hydrodynamic Coefficients of Autonomous Underwater Glider Using Vertical Planar Motion Mechanism Test. Journal of Ocean Engineering and Technology, 28(2), 119-125.
Jung J.W., Jeong J.H., Kim I.G., Lee S.K.. Experimental Study on Hydrodynamic Coefficients of Autonomous Underwater Glider Using Vertical Planar Motion Mechanism Test. Journal of Ocean Engineering and Technology 2014;28(2):119–125. 10.5574/KSOE.2014.28.2.119.Kim, Y.G., Yun, K.H., Kim, S.Y., Kim, D.J., 2012. Captive Model Test of Submerged Body Using CPMC. Journal of the Society of Naval Architects of Korea, 49(4), 296-303.
Kim Y.G., Yun K.H., Kim S.Y., Kim D.J.. Captive Model Test of Submerged Body Using CPMC. Journal of the Society of Naval Architects of Korea 2012;49(4):296–303. 10.3744/SNAK.2012.49.4.296.Kim, S.Y., Yang, H.J., Kim, J.W., Hong, S.W., Kang, J.S., Jun, T.B., 2000. A Description of KRISO Rotating Arm System. Journal of Ship & Ocean Engineering, 29, 155-160.
Kim S.Y., Yang H.J., Kim J.W., Hong S.W., Kang J.S., Jun T.B.. A Description of KRISO Rotating Arm System. Journal of Ship & Ocean Engineering 2000;29:155–160.Pan, Y.C., Zhou, Q.D., Zhang, H.X, 2015. Numerical Simulation of Rotating Arm Test for Prediction of Submarine Rotary Derivatives. Journal of Hydrodynamics, 27(1), 68-75.
Pan Y.C., Zhou Q.D., Zhang H.X. Numerical Simulation of Rotating Arm Test for Prediction of Submarine Rotary Derivatives. Journal of Hydrodynamics 2015;27(1):68–75. 10.1016/S1001-6058(15)60457-7.Shin, H.K., Choi, S.H., 2011. Prediction of Maneuverability of KCS Using Captive Model Test. Journal of the Society of Naval Architects of Korea, 48(5), 465-472.
Shin H.K., Choi S.H.. Prediction of Maneuverability of KCS Using Captive Model Test. Journal of the Society of Naval Architects of Korea 2011;48(5):465–472. 10.3744/SNAK.2011.48.5.465.Shin, Y.K., 2007. Prediction of Hydrodynamic Coefficients for Maneuvering of Underwater Vehicles. Doctoral Degree Dissertation, Pusan National University.
Shin Y.K.. Prediction of Hydrodynamic Coefficients for Maneuvering of Underwater Vehicles, Doctoral Degree Dissertation Pusan National University; 2007.SNAME, 1950. Nomenclature for Treating the Motion of a Submerged Body Through a Fluid. The Society of Naval Architects and Marine Engineerings, Technical and Research Bulletin, 1-5, 1-15.
Nomenclature for Treating the Motion of a Submerged Body Through a Fluid. The Society of Naval Architects and Marine Engineerings. Technical and Research Bulletin 1950;1-5:1–15.Yun, K.H., Kim, Y.G., 2012. Study on the Maneuverability of Barge by Captive Model Test. Journal of Navigation and Port Research, 36(8), 613-618.
Yun K.H., Kim Y.G.. Study on the Maneuverability of Barge by Captive Model Test. Journal of Navigation and Port Research 2012;36(8):613–618. 10.5394/KINPR.2012.36.8.613.