


1. ņä£ ļĪĀ
ņĢłņĀäņÜ┤ĒĢŁņśüņŚŁņØĆ ņÜ┤ļÅÖņ▓┤Ļ░Ć ņĢłņĀäĒĢśĻ▓ī ņÜ┤ĒĢŁĒĢĀ ņłś ņ׳ļŖö ņśüņŚŁņØä ņØśļ»ĖĒĢśĻ│Ā ĒĢŁĻ│ĄĻĖ░ļéś ņ×ĀņłśĒĢ© ļō▒ņØś ļŗżņ¢æĒĢ£ ņÜ┤ļÅÖņ▓┤ņŚÉ ļīĆĒĢśņŚ¼ ņĀüņÜ® Ļ░ĆļŖźĒĢ£ Ļ░£ļģÉņØ┤ļŗż. ņ×ĀņłśĒĢ©ņØś Ļ▓ĮņÜ░ ņĢłņĀäņÜ┤ĒĢŁņśüņŚŁņØĆ ņäĀņåŹ, ņŗ¼ļÅä, ņóģļÅÖņÜöĻ░üņŚÉ ņØśĒĢ┤ņä£ ņĀĢņØśļÉ£ļŗż. Ļ╣Ŗņ¢┤ņ¦łņłśļĪØ ņ”ØĻ░ĆĒĢśļŖö ņłśņĢĢņ£╝ļĪ£ ņØĖĒĢśņŚ¼ ļ░£ņāØĒĢĀ ņłś ņ׳ļŖö ņäĀņ▓┤ņØś ņåÉņāüņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ ņĄ£ļīĆņĢłņĀäņŗ¼ļÅäĻ░Ć ņäżņĀĢļÉśĻ│Ā, ņłśļ®┤ ĻĘ╝ņ▓śņŚÉņä£ ņÜ┤ĒĢŁĒĢśļŖö Ļ▓ĮņÜ░ Ēīī Ļ░ĢņĀ£ļĀź ļ░Å ĒØĪņ×ģļĀźņ£╝ļĪ£ ņØĖĒĢ┤ ņäĀņ▓┤Ļ░Ć ņłśļ®┤ņ£äļĪ£ ļüīļ”¼ļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņĄ£ņåīņĢłņĀäņŗ¼ļÅäĻ░Ć ņäżņĀĢļÉ£ļŗż. Ļ│╝ļÅäĒĢ£ ņóģļÅÖņÜöĻ░üņ£╝ļĪ£ ņØĖĒĢ┤ ņČöņ¦äĻ│äĒåĄņØ┤ ņåÉņāüņØä ļ░øĻ▓ī ļÉśĻ▒░ļéś ļŗżļźĖ ņśłĻĖ░ņ╣ś ļ¬╗ĒĢ£ ņåÉņāüņØä ņ×ģņØä Ļ░ĆļŖźņä▒ņØ┤ ņ׳ņ£╝ļ»ĆļĪ£ ņØ┤ļź╝ ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ ņóģļÅÖņÜöĻ░ü ņĀ£ĒĢ£ņØ┤ ņäżņĀĢļÉ£ļŗż. ņØ┤ļ¤¼ĒĢ£ ņĀ£ĒĢ£ņØä ļ▓Śņ¢┤ļéśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņåŹļÅä ļ│ä ņÜ┤ĒĢŁĻ░ĆļŖź ņŗ¼ļÅäņŚÉ ļīĆĒĢ£ ņĢłņĀäņÜ┤ĒĢŁņśüņŚŁ ļÅäĒæ£ļź╝ ņ×æņä▒ĒĢśĻ│Ā ņĪ░ĒāĆņłśņŚÉĻ▓ī ņĀäļŗ¼ ļ░Å ņłÖņ¦Ć ņŗ£ĒéżĻ▒░ļéś, ņŗ¼ļÅäļ│ĆĻ▓Į ņŗ£ ņÖäļ¦īĒĢ£ ņŗ¼ļÅäĻ▓ĮļĪ£ļź╝ ņāØņä▒ ĒĢ£ Ēøä ņØ┤ļź╝ ņČöņóģĒĢśļÅäļĪØ ņ×ĀņłśĒĢ©ņØä ņĀ£ņ¢┤ĒĢśļŖö ļ░®ņŗØņ£╝ļĪ£ ņóģļÅÖņÜöĻ░üņØä ļ│┤ĒśĖĒĢśļŖö ļō▒ņØś ļŗżņåī ņłśļÅÖņĀüņØĖ ļ░®ļ▓Ģņ£╝ļĪ£ ņĀ£ĒĢ£ļÉ£ ļ│Ćņłś(ĒĢ£Ļ│äļ│Ćņłś)ļōżņØä ļ│┤ĒśĖĒĢśĻ│Ā ņ׳ļŗż.
ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ņÜ┤ļÅÖņ▓┤ņØś ĻĄ¼ņĪ░ņĀü ĒĢ£Ļ│ä, ļÅÖņŚŁĒĢÖņĀü ĒĢ£Ļ│ä, ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢśņ¦Ć ņĢŖĻ│Ā Ļ│Āņ£ĀņØś ņÜ┤ĒĢŁņśüņŚŁ ļé┤ņŚÉņä£ ņ×Éņ£ĀļĪŁĻ▓ī ņÜ┤ĒĢŁĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢśļŖö ņŗ£ņŖżĒģ£ņØ┤ļŗż(Shin et al., 2010). ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ļ│┤ņłśņĀüņ£╝ļĪ£ ņĀæĻĘ╝ĒĢĀ ņłś ļ░¢ņŚÉ ņŚåļŖö ņÜ┤ĒĢŁ ņśüņŚŁņØś Ļ▓ĮĻ│äļź╝ ļäśņ¦Ć ņĢŖļÅäļĪØ ļ│┤ņןĒĢ©ņ£╝ļĪ£ņŹ© ņÜ┤ĒĢŁņé¼Ļ│Āļź╝ ņżäņØ╝ ņłś ņ׳Ļ│Ā, ņśüņŚŁņØś Ļ▓ĮĻ│äļź╝ ņČ®ļČäĒ׳ ĒÖ£ņÜ®ĒĢ£ ĒÜ©ņ£©ņĀüņØĖ ņ×äļ¼┤ņłśĒ¢ēņØä Ļ░ĆļŖźĒĢśĻ▓ī ĒĢ£ļŗż. ļśÉĒĢ£ ņĀ£ĒĢ£ļÉśņ¢┤ņĢ╝ ĒĢśļŖö ņāüĒā£ļōżņØä ļ¬©ļŗłĒä░ļ¦ü ĒĢśĻ│Ā ņĀ£ņ¢┤ĒĢ┤ņĢ╝ ĒĢśļŖö ņĪ░ņóģņé¼ņØś ņŚģļ¼┤ļČĆļŗ┤ņØä Ļ▓ĮĻ░Éņŗ£Ēé¼ ņłś ņ׳ļŗż.
ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļŖö ņŻ╝ļĪ£ ĒĢŁĻ│ĄļČäņĢ╝ņŚÉņä£ ĒÖ£ļ░£ĒĢśĻ▓ī ņØ┤ļŻ©ņ¢┤ņĪīļŗż. ņĪ░ņóģļ®┤ņØ┤ ņ£ĀņĢĢņןņ╣śļź╝ ĒåĄĒĢ┤ ņŚ░Ļ▓░ļÉśņ¢┤ ņ׳ļŖö ļ░®ņŗØņØ┤ņŚłļŹś 1980ļģäļīĆ ņØ┤Ēøä ņĀäĻĖ░ņĀü ņŗĀĒśĖļĪ£ ņĪ░ņóģļ®┤ņØä ņĀ£ņ¢┤ĒĢśļŖö Fly-by-wire ļ░®ņŗØņ£╝ļĪ£ ļ░öļĆ£ņŚÉ ļö░ļØ╝ ņ×ÉļÅÖņĀ£ņ¢┤ ļ░Å ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŚÉ ļīĆĒĢ£ Ļ░£ļģÉņØ┤ ņżæņÜöĒĢśĻ▓ī ļČĆĻ░üļÉśņŚłļŗż. ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖ ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£ļŖö Fixed horizon prediction, ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”ś, Peak response estimation, Non-iterative adaptive limit estimation ļō▒ņØ┤ ņ׳ļŗż(Sahani, 2005). Fixed horizon predictionņØĆ ĒĢ£Ļ│äļ│ĆņłśņØś ņ¢┤ļ¢ĀĒĢ£ ņŗ£Ļ░äĻ░äĻ▓® ĒøäņØś Ļ░ÆņØä ņśłņĖĪĒĢśļŖö ļ░®ļ▓ĢņØ┤ļŗż(Bateman, 1998). ļ»ĖļלņØś ĒĢ£Ļ│äļ│Ćņłś Ļ░ÆņØä ņśłņĖĪĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ĒĢ£Ļ│äļ│ĆņłśņÖĆ ņĀ£ņ¢┤ņ×ģļĀź, ĻĘĖļ”¼Ļ│Ā ņŗ£Ļ░äĻ░äĻ▓®Ļ░äņØś Ļ┤ĆĻ│äņŗØņØ┤ ĒĢäņÜöĒĢśļŗż. ņØ┤ ņĢīĻ│Āļ”¼ņ”śņØĆ 1ņ┤ł ļé©ņ¦ōĒĢ£ ļ»ĖļלņØś Ļ░Æļ░¢ņŚÉ ņśłņĖĪĒĢĀ ņłś ņŚåļŗżļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż. ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņØĆ Horn et al.(1998)ņØ┤ ņĀ£ņĢłĒĢ£ Ļ░£ļģÉņ£╝ļĪ£, ņżĆ ņĀĢņāüņāüĒā£ņŚÉ ļīĆĒĢ£ Ļ░£ļģÉņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ£Ļ│äļ│ĆņłśĻ░Ć ĒĢ£Ļ│äņĀÉņØä ņ┤łĻ│╝ĒĢśĻ▓ī ļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØä ņČöņĀĢĒĢśļŖö ļ░®ņŗØņØ┤ļŗż. ļŗżņ¢æĒĢ£ ņÜ┤ĒĢŁ ņĪ░Ļ▒┤ņŚÉļÅä ņĀüņØæĒĢĀ ņłś ņ׳ļŖö on-line training ļ░®ņŗØņØś ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØņØä ņØ┤ņÜ®ĒĢ£ adaptive ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņØ┤ Horn et al.(2002), Unnikrishnan et al.(2003), Yavrucuk et al.(2002), Yavrucuk(2003)ņŚÉ ņØśĒĢśņŚ¼ ņĀ£ņĢłļÉśņŚłļŗż. Peak response estimationņØĆ Ļ│╝ļÅäņØæļŗĄņØä Ļ░¢ļŖö ļÅÖņŚŁĒĢÖņŚÉ ņĀüĒĢ®ĒĢ£ ņĢīĻ│Āļ”¼ņ”śņØ┤ļŗż. ņØ┤ ņĢīĻ│Āļ”¼ņ”śņØĆ ņĀ£ņ¢┤ņ×ģļĀźņ£╝ļĪ£ ņØĖĒĢ┤ ņ”ēĻ░ü ļ░£ņāØĒĢśļŖö Ļ│╝ļÅäņØæļŗĄņØś Ļ│ĀņĀÉņØä ņČöņĀĢĒĢśļŖö ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£, ļĪ£Ēä░ ĒŚłļĖī(Rotor hub) ļ¬©ļ®śĒŖĖņÖĆ Ēöīļ×®ĒĢæ(Flapping)ņØś ĒĢ£Ļ│äļź╝ Ēö╝ĒĢśĻĖ░ ņ£äĒĢ£ ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£ ņé¼ņÜ®ļÉśņŚłļŗż(Horn and Sahani, 2004). Non-iterative adaptive limit estimationņØĆ adaptive ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņŚÉņä£ ĒĢäņÜöļĪ£ ĒĢśļŖö ļ░śļ│ĄĻ│äņé░ņØä ņĀ£Ļ▒░ĒĢ£ ņĢīĻ│Āļ”¼ņ”śņ£╝ļĪ£, Gursoy and Yavrucuk(2015)ņŚÉ ņØśĒĢ┤ņä£ Ļ░£ļ░£ļÉśņŚłļŗż. ņ£äņÖĆ Ļ░ÖņØĆ ņĢīĻ│Āļ”¼ņ”śņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäżĻ│äļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØ┤ Ļ│ĀņĀĢņØĄ ĒĢŁĻ│ĄĻĖ░, ĒÜīņĀäņØĄ ĒĢŁĻ│ĄĻĖ░, ļ¼┤ņØĖĒĢŁĻ│ĄĻĖ░ ļō▒ ļŗżņ¢æĒĢ£ ĒĢŁĻ│ĄĻĖ░ņŚÉ ņĀüņÜ®ĒĢ£ ņé¼ļĪĆĻ░Ć ļ¼ĖĒŚīņŚÉ ļŗżņłś ļ│┤Ļ│ĀļÉśĻ│Ā ņ׳ļŗż(Yavrucuk et al., 2009; Shin et al., 2011; Falkena et al., 2011; Gursoy and Yavrucuk, 2013). ņĢ×ņä£ ņäżļ¬ģĒĢ£ ĒĢŁĻ│ĄļČäņĢ╝ņÖĆ Ļ░ÖņØ┤ ļŖźļÅÖņĀüņØĖ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ ņäżĻ│ä ļ░Å ņĀüņÜ®ņŚÉ Ļ┤ĆĒĢ£ ņé¼ļĪĆļŖö ņ×ĀņłśĒĢ©ņØś ņĪ░ņóģ ļ░Å ņĀ£ņ¢┤ņŚÉ Ļ┤ĆļĀ©ļÉ£ ļ¼ĖĒŚīņŚÉ ļ│┤Ļ│ĀļÉ£ ļ░ö ņŚåļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņóģļÅÖņÜöĻ░üņŚÉ ļīĆĒĢ£ ņ×ĀņłśĒĢ©ņØś ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØä ņäżĻ│äĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņóģļÅÖņÜö ņÜ┤ļÅÖņØä ļ¬©ņé¼ĒĢśĻĖ░ ņ£äĒĢ£ ņČöņĀĢļ¬©ĒśĢņØä ļ¦īļōżĻ│Ā ņśżņ░© ļ░®ņĀĢņŗØņØä ĻĄ¼ņä▒ĒĢśņśĆļŗż. ņśżņ░© ļ░®ņĀĢņŗØņØä ņĢłņĀĢĒÖö ņŗ£ĒéżĻĖ░ ņ£äĒĢ£ ņäĀĒśĢļ│┤ņāüĻĖ░ļŖö Linear quadratic regulator(LQR)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäżĻ│äĒĢśņśĆļŗż. ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØņØä ņØ┤ņÜ®ĒĢ£ ņĀüņØæņĀ£ņ¢┤ĻĖ░ļź╝ ņäżĻ│äĒĢśņśĆļŗż. ĒĢ£Ļ│äņśłņĖĪ ņĢīĻ│Āļ”¼ņ”śņØĆ ņĀ£ĒĢ£ĒĢśĻ│Āņ×É ĒĢśļŖö ļ│ĆņłśņØś ņÜ┤ļÅÖĒŖ╣ņä▒ņØä Ļ│ĀļĀżĒĢśņŚ¼ ņäżĻ│äĒĢśņŚ¼ņĢ╝ ĒĢ£ļŗż. ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöļŖö ņØ╝ņĀĢĒĢ£ ņäĀļ»ĖņĀ£ņ¢┤ĒīÉĻ░üņŚÉ Ļ│╝ļÅäņØæļŗĄņØä Ļ░¢ņ¦Ć ņĢŖĻ│Ā ņĀĢņāüņāüĒā£ļĪ£ ņłśļĀ┤ĒĢśļŖö Ļ▓ĮĒ¢źņØä Ļ░¢Ļ│Ā ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ņØ┤ļ¤¼ĒĢ£ ņÜ┤ļÅÖĒŖ╣ņä▒ņŚÉ ņĀüĒĢ®ĒĢ£ ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ£Ļ│äņśłņĖĪ ņĢīĻ│Āļ”¼ņ”śņØä ņ×æņä▒ĒĢśņśĆļŗż. ņ×ĀņłśĒĢ©ņØś ņŗ¼ļÅäņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģśņŚÉ ņäżĻ│äļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØä ņĀüņÜ®ņŗ£ņ╝£ ĻĘĖ ņä▒ļŖźņØä ĒÖĢņØĖĒĢśņśĆļŗż.
2. ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ ņäżĻ│ä
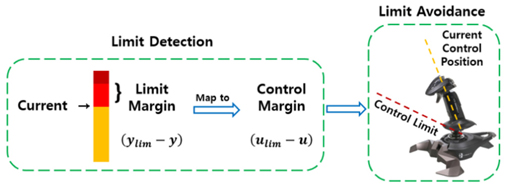
ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ĒĢ£Ļ│äņśłņĖĪĻ│╝ ĒĢ£Ļ│äĒÜīĒö╝ļĪ£ ĻĄ¼ņä▒ĒĢĀ ņłś ņ׳ļŗż. ĒĢ£Ļ│äņśłņĖĪņØĆ ņ×ĀņłśĒĢ©ņØś ņāüĒā£ņÖĆ ņĀ£ņ¢┤ņ×ģļĀźņØä ļ░öĒāĢņ£╝ļĪ£ ņÜ┤ĒĢŁņśüņŚŁ Ļ▓ĮĻ│äļź╝ ļ▓Śņ¢┤ļéśņ¦Ć ņĢŖļÅäļĪØ ĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│ä ļ░Å ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Ā(Margin)ļź╝ Ļ│äņé░ĒĢ£ļŗż. ĒĢ£Ļ│äĒÜīĒö╝ļŖö ĒĢ£Ļ│äņśłņĖĪņŚÉņä£ Ļ│äņé░ļÉ£ ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢśņ¦Ć ņĢŖļÅäļĪØ ĒĢśļŖö Ļ│╝ņĀĢņØä ņØśļ»ĖĒĢ£ļŗż. Hard ņÜ┤ĒĢŁņśüņŚŁļ│┤ĒśĖ(Hard envelope protection) ļ░®ņŗØņØĆ ņŻ╝ļĪ£ ņśżĒåĀĒīīņØ╝ļ¤┐ņ£╝ļĪ£ ņÜ┤ļÅÖņ▓┤ļź╝ ņĀ£ņ¢┤ĒĢśļŖö Ļ▓ĮņÜ░ņŚÉ ņé¼ņÜ®ļÉśļŖö ļ░®ļ▓Ģņ£╝ļĪ£, ņŗ¼ļÅäņĀ£ņ¢┤ĻĖ░ņÖĆ Ļ░ÖņØĆ ĒĢśņ£äņĀ£ņ¢┤ĻĖ░(Low level controller)ņŚÉņä£ ņČ£ļĀźļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀź ņŗĀĒśĖņŚÉ ņĀ£ĒĢ£ņØä Ļ▒Ėņ¢┤ņŻ╝ļŖö ļ░®ļ▓Ģņ£╝ļĪ£ ĒĢ£Ļ│äļź╝ ĒÜīĒö╝ĒĢśļŖö ļ░®ļ▓ĢņØ┤ļŗż. Soft ņÜ┤ĒĢŁņśüņŚŁļ│┤ĒśĖ(Soft envelope protection) ļ░®ņŗØņØĆ ņĪ░ņóģņé¼Ļ░Ć ņłśļÅÖņ£╝ļĪ£ ņÜ┤ļÅÖņ▓┤ļź╝ ņĀ£ņ¢┤ĒĢśļŖö Ļ▓ĮņÜ░ņŚÉ ņé¼ņÜ®ļÉśļŖö ļ░®ļ▓Ģņ£╝ļĪ£, ĒĢ£Ļ│äņśłņĖĪņŚÉņä£ Ļ│äņé░ļÉ£ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Āļź╝ ļ░öĒāĢņ£╝ļĪ£ ņŖżĒŗ▒ņØä ĒåĄĒĢ£ ņ¦äļÅÖņŗĀĒśĖļéś ņŗ£Ļ░ü ļ░Å ņ▓ŁĻ░üņĀüņØĖ ņŗĀĒśĖļź╝ ĒåĄĒĢ┤ Ļ▓ĮĻ│Āļź╝ ĒĢśņŚ¼ ņĪ░ņóģņé¼Ļ░Ć ņŖżņŖżļĪ£ ņĀ£ĒĢ£ņØä ļ▓Śņ¢┤ļéśņ¦Ć ņĢŖļÅäļĪØ ĒĢśļŖö ļ░®ņŗØņØ┤ļŗż. ļö░ļØ╝ņä£ soft ņÜ┤ĒĢŁņśüņŚŁļ│┤ĒśĖļ░®ņŗØņØś ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ĒĢ£Ļ│äņśłņĖĪ ņĢīĻ│Āļ”¼ņ”ś ņäżĻ│äĻ╣īņ¦Ćļź╝ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ ņäżĻ│äļØ╝Ļ│Ā ņĀĢņØśĒĢĀ ņłś ņ׳ļŗż. ļ│Ė ņŚ░ĻĄ¼ļŖö ņĪ░ĒāĆņłśĻ░Ć ņłśļÅÖņ£╝ļĪ£ ņ×ĀņłśĒĢ©ņØä ņĀ£ņ¢┤ĒĢ£ļŗżĻ│Ā Ļ░ĆņĀĢĒĢśĻ│Ā Soft ņÜ┤ĒĢŁņśüņŚŁļ│┤ĒśĖļ░®ņŗØņØś ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØä ņäżĻ│äĒĢśņśĆļŗż. Fig. 1ņŚÉ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØś Ļ░£ļģÉļÅäļź╝ ļÅäņŗ£ĒĢśņśĆļŗż.
2.1 ņČöņĀĢļ¬©ĒśĢ ļ░Å ņśżņ░©ļ░®ņĀĢņŗØ
ĒĢ£Ļ│äņśłņĖĪņØä ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ņĀ£ĒĢ£ĒĢśĻ│Āņ×É ĒĢśļŖö ļ│ĆņłśņØś ņŗżņĀ£ļÅÖņŚŁĒĢÖņØä ņČöņĀĢĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ĒĢ£ĒĢśĻ│Āņ×É ĒĢśļŖö ļ│ĆņłśļŖö ņóģļÅÖņÜöĻ░üņØ┤ļŗż. ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöļŖö ļŗżņØīĻ│╝ Ļ░ÖņØĆ ņØ╝ļ░śņĀüņØĖ ļ╣äņäĀĒśĢ ĒĢ©ņłśļĪ£ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.

ņŚ¼ĻĖ░ņä£, ╬ĖļŖö ņóģļÅÖņÜöĻ░ü, xļŖö ņóģļÅÖņÜöņŚÉ ņśüĒ¢źņØä ļ»Ėņ╣śļŖö ņāüĒā£ļ▓ĪĒä░, ╬┤eļŖö ņäĀļ»ĖņĀ£ņ¢┤ĒīÉĻ░üņ£╝ļĪ£ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜö ņÜ┤ļÅÖņØś ņĀ£ņ¢┤ņ×ģļĀźņØä ņØśļ»ĖĒĢ£ļŗż. ņŗØ (1)ņŚÉņä£ Ēæ£ĒśäļÉ£ ļ╣äņäĀĒśĢ ĒĢ©ņłśļŖö ļ¬©ļŹĖļ¦ü ļÉ£ ĒĢŁĻ│╝ ļ¬©ļŹĖļ¦ü ļÉśņ¦Ć ņĢŖņØĆ ĒĢŁņ£╝ļĪ£ ļéśļłī ņłś ņ׳ļŗż. ļ¬©ļŹĖļ¦ü ļÉ£ ĒĢŁņØä ņäĀĒśĢļÅÖņŚŁĒĢÖņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśĻ│Ā ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä Ōłå(x,╬┤e)ļØ╝ ņĀĢņØśĒĢśļ®┤ ņŗØ (1)ņØĆ ņŗØ (2)ņÖĆ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.

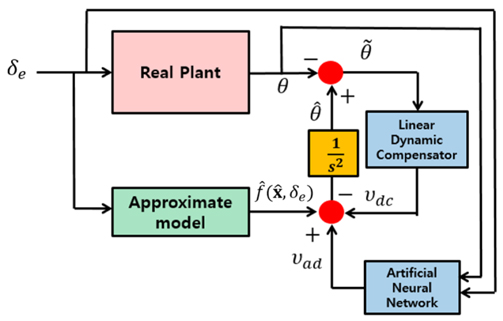
ņŗØ (2)ņØś a1, a2, bļØ╝Ļ│Ā Ēæ£ĒśäļÉ£ Ļ│äņłśļŖö ņ×ĀņłśĒĢ© ņóģļÅÖņÜö ņÜ┤ļÅÖņØś ņäĀĒśĢ ņ£Āņ▓┤ļĀź ļ»ĖĻ│äņłśņÖĆ Ļ┤ĆļĀ©ļÉ£ļŗż. ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöļź╝ ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼, ņŗØ (2)ņØś ļ¬©ļŹĖļ¦ü ļÉ£ ĒĢŁņ£╝ļĪ£ Ēæ£ĒśäļÉ£ ņäĀĒśĢļÅÖņŚŁĒĢÖņØä ĻĘ╝ņé¼ĒĢ©ņłś  ļĪ£ ņäżņĀĢĒĢśĻ│Ā ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖ vdcņÖĆ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖ vadļź╝ ļŹöĒĢ┤ņŻ╝ņ¢┤ ņČöņĀĢļ¬©ĒśĢņØä ĻĄ¼ņä▒ĒĢśļ®┤ ņŗØ (3)Ļ│╝ Ļ░Öļŗż.
ļĪ£ ņäżņĀĢĒĢśĻ│Ā ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖ vdcņÖĆ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖ vadļź╝ ļŹöĒĢ┤ņŻ╝ņ¢┤ ņČöņĀĢļ¬©ĒśĢņØä ĻĄ¼ņä▒ĒĢśļ®┤ ņŗØ (3)Ļ│╝ Ļ░Öļŗż.
ļĪ£ ņäżņĀĢĒĢśĻ│Ā ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖ vdcņÖĆ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖ vadļź╝ ļŹöĒĢ┤ņŻ╝ņ¢┤ ņČöņĀĢļ¬©ĒśĢņØä ĻĄ¼ņä▒ĒĢśļ®┤ ņŗØ (3)Ļ│╝ Ļ░Öļŗż.
ņŚ¼ĻĖ░ņä£,  ļŖö ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢśĻ│Ā,
ļŖö ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢśĻ│Ā,  ļŖö
ļŖö  ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (3)ņŚÉņä£ ņŗØ (2)ļź╝ ļ╣╝ņŻ╝ļ®┤ ņŗØ (4)ņÖĆ Ļ░ÖņØĆ ņśżņ░©ļÅÖņŚŁĒĢÖņØä ĻĄ¼ņä▒ĒĢĀ ņłś ņ׳ļŗż.
ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (3)ņŚÉņä£ ņŗØ (2)ļź╝ ļ╣╝ņŻ╝ļ®┤ ņŗØ (4)ņÖĆ Ļ░ÖņØĆ ņśżņ░©ļÅÖņŚŁĒĢÖņØä ĻĄ¼ņä▒ĒĢĀ ņłś ņ׳ļŗż.
ļŖö ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢśĻ│Ā, ļŖö ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (3)ņŚÉņä£ ņŗØ (2)ļź╝ ļ╣╝ņŻ╝ļ®┤ ņŗØ (4)ņÖĆ Ļ░ÖņØĆ ņśżņ░©ļÅÖņŚŁĒĢÖņØä ĻĄ¼ņä▒ĒĢĀ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£  ļŖö ņČöņĀĢļ¬©ĒśĢĻ│╝ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░ü Ļ░äņØś ņśżņ░©ļĪ£
ļŖö ņČöņĀĢļ¬©ĒśĢĻ│╝ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░ü Ļ░äņØś ņśżņ░©ļĪ£  ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (4)ļź╝ Ē¢ēļĀ¼ņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (5)ņÖĆ Ļ░Öļŗż.
ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (4)ļź╝ Ē¢ēļĀ¼ņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (5)ņÖĆ Ļ░Öļŗż.
ļŖö ņČöņĀĢļ¬©ĒśĢĻ│╝ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░ü Ļ░äņØś ņśżņ░©ļĪ£ ļź╝ ņØśļ»ĖĒĢ£ļŗż. ņŗØ (4)ļź╝ Ē¢ēļĀ¼ņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (5)ņÖĆ Ļ░Öļŗż.
ņŚ¼ĻĖ░ņä£,

ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖ vadĻ░Ć ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ Ōłå(x,╬┤e)ļź╝ ņÖäļ▓ĮĒĢśĻ▓ī ļ│┤ņāüĒĢśĻ│Ā ņäĀĒśĢļ│┤ņāüĻĖ░ vdcĻ░Ć ņśżņ░©ļ░®ņĀĢņŗØņØä ņĢłņĀĢĒÖö ņŗ£ĒéżļÅäļĪØ ņäżĻ│äĻ░Ć ļÉśņ¢┤ņ׳ļŗżļ®┤ ņśżņ░©ļŖö 0ņ£╝ļĪ£ ņłśļĀ┤ĒĢśĻ▓ī ļÉśĻ│Ā, Ļ▓░Ļ│╝ņĀüņ£╝ļĪ£ ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØ┤ ņŗżņĀ£ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░üņØä ņל ņČöņĀĢĒĢśĻ▓ī ļÉ£ļŗż. ņ×ĀņłśĒĢ©ņØś ņŗżņĀ£ļÅÖņŚŁĒĢÖņØä ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢ£ ņĢīĻ│Āļ”¼ņ”śņØä ļĖöļĪØņäĀļÅäļĪ£ Ēæ£ĒśäĒĢśļ®┤ Fig. 2ņÖĆ Ļ░Öļŗż.
2.2 ņäĀĒśĢļ│┤ņāüĻĖ░
ņäĀĒśĢļ│┤ņāüĻĖ░ļŖö ņŗØ (5)ņŚÉ Ēæ£ĒśäļÉśņ¢┤ ņ׳ļŖö ņśżņ░©ļ░®ņĀĢņŗØņØä ņĢłņĀĢĒÖöņŗ£ĒéżĻĖ░ ņ£äĒĢśņŚ¼ ĒĢäņÜöĒĢśļŗż. ļ¦īņĢĮ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖĻ░Ć ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä ņל ņČöņĀĢĒĢ£ļŗżĻ│Ā Ļ░ĆņĀĢĒĢśļ®┤, ņŗØ (5)ļŖö ņĢäļלņÖĆ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.

ņäĀĒśĢļ│┤ņāüĻĖ░ņØś ņä▒ļŖźņØĆ ņŗØ (6)ņŚÉņä£ Ēæ£ĒśäļÉ£ ņśżņ░©ļ▓ĪĒä░ņÖĆ ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖņØś Ēü¼ĻĖ░ļĪ£ ĒīÉļ│äĒĢĀ ņłś ņ׳ļŗż. ņĄ£ņåīĒÖö ņŗ£ņ╝£ņĢ╝ ĒĢśļŖö ļæÉ ļ│Ćņłśļź╝ ņØ┤ņ░©ņŗØ ĒśĢĒā£ļĪ£ Ēæ£ĒśäĒĢ£ ņä▒ļŖźņ¦Ćņłśļź╝ ņŗØ (7)Ļ│╝ Ļ░ÖņØ┤ ņäżņĀĢĒĢ┤ ļ│┤ņ×É.

QņÖĆ RņØĆ Ļ░üĻ░ü ņśżņ░©ļ▓ĪĒä░ņÖĆ ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖņØś Ļ░Ćņżæņ╣ś Ē¢ēļĀ¼ņØ┤ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņ£äņÖĆ Ļ░ÖņØĆ ņØ┤ņ░©ņŗØ ĒśĢĒā£ņØś ņä▒ļŖźņ¦Ćņłśļź╝ ņĄ£ņåīĒÖö ņŗ£Ēé¼ ņłś ņ׳ļŖö ņĀ£ņ¢┤ņ×ģļĀźņØä ļÅäņČ£ĒĢśļŖö ņĢīĻ│Āļ”¼ņ”śņØĖ LQRņĀ£ņ¢┤ĻĖ░ļ▓ĢņØä ņé¼ņÜ®ĒĢśņŚ¼ ņäĀĒśĢļ│┤ņāüĻĖ░ļź╝ ņäżĻ│äĒĢśņśĆļŗż. ņä▒ļŖźĒÅēĻ░ĆĒĢ©ņłś JĻ░Ć ņĄ£ņåīĻ░Ć ļÉśļÅäļĪØ ĒĢśļŖö ņäĀĒśĢļ│┤ņāüĻĖ░ņŗĀĒśĖļŖö ņŗØ (8)ņŚÉ Ēæ£ĒśäļÉ£ Ricattiļ░®ņĀĢņŗØņØä ĒÆĆņ¢┤ņä£ Ē¢ēļĀ¼ P1ņØä Ļ│äņé░ĒĢśĻ│Ā, ņØ┤ļź╝ ņŗØ (9)ņŚÉ ļīĆņ×ģĒĢśņŚ¼ ĻĄ¼ĒĢĀ ņłś ņ׳ļŗż.


2.3 ņĀüņØæņĀ£ņ¢┤ĻĖ░
ņĀüņØæņĀ£ņ¢┤ĻĖ░ļŖö ņśżņ░©ļ░®ņĀĢņŗØņŚÉņä£ Ēæ£ĒśäļÉśņ¢┤ ņ׳ļŖö ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņé¼ņÜ®ļÉ£ļŗż. ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØņØĆ ĻĄ¼ņĪ░ļź╝ ņĢī ņłś ņŚåļŖö ĒĢ©ņłśļź╝ ņŻ╝ņ¢┤ņ¦ä ņ×ģļĀź ļ│Ćņłśļōż Ļ░ä ļ╣äņäĀĒśĢ ņĪ░ĒĢ®ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĻĘ╝ņé¼ĒÖö ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņśłņĖĪļŖźļĀźņØ┤ ņÜ░ņłśĒĢśļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Park et al.(2015)ņØś ņŚ░ĻĄ¼ļź╝ ņ░ĖĻ│ĀĒĢśņŚ¼ ļŗ©ņØ╝ņØĆļŗēņĖĄ(Single hidden layer)ņØä Ļ░¢ļŖö ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØņØä ņé¼ņÜ®ĒĢśņŚ¼ ņĀüņØæņĀ£ņ¢┤ĻĖ░ļź╝ ņäżĻ│äĒĢśņśĆļŗż. ņĀüņØæņĀ£ņ¢┤ĻĖ░ņØś ņČ£ļĀźņØĖ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖļŖö ņŗØ (10)Ļ│╝ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.

ņŚ¼ĻĖ░ņä£ ╬╝ļŖö ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØņØś ņ×ģļĀźĻ░ÆņØä ņØśļ»ĖĒĢśļ®░, ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØ┤ ņ¢┤ļ¢ż ļ│ĆņłśļōżņØś ĒĢ©ņłśĻ░Ć ļÉĀņ¦Ć Ļ│ĀļĀżĒĢśņŚ¼ ņäżņĀĢĒĢ┤ ņŻ╝ņ¢┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņŗ¼ļÅäļ│ĆĻ▓Į ņżæ ņłśĒÅēļ®┤ ļ░®Ē¢ź ņÜ┤ļÅÖņØĆ Ļ▒░ņØś ņŚåļŗżĻ│Ā Ļ░ĆņĀĢņØä ĒĢśņŚ¼ ņóģļÅÖņÜö ņÜ┤ļÅÖņŚÉ ņśüĒ¢źņØä ļ»Ėņ╣śļŖö ļ│Ćņłśļź╝ ņŗØ (11)Ļ│╝ Ļ░ÖņØ┤ ņäżņĀĢĒĢśņśĆļŗż.

ŽāļŖö ĒÖ£ņä▒ĒÖö(Activation) ĒĢ©ņłśļź╝ ņØśļ»ĖĒĢśļ®░ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņŗ£ĻĘĖļ¬©ņØ┤ļō£ ĒĢ©ņłśĻ░Ć ņé¼ņÜ®ļÉśņŚłļŗż.  ļŖö ņ×ģļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä,
ļŖö ņ×ģļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä,  ļŖö ņČ£ļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä ņØśļ»ĖĒĢśļ®░ ļ”¼ņĢ╝ĒöäļģĖĒöä ņĢłņĀĢņä▒ ņØ┤ļĪĀņØä ĻĖ░ļ░śņ£╝ļĪ£ ņ£ĀļÅäļÉ£ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ĒåĄĒĢśņŚ¼ ļ¦ż ņŗ£Ļ░äļ¦łļŗż ņŚģļŹ░ņØ┤ĒŖĖļÉ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Yavrucuk et al.(2002)ņØś ņŚ░ĻĄ¼ļź╝ ņ░ĖĻ│ĀĒĢśņŚ¼ ņŗØ (12), (13)Ļ│╝ Ļ░ÖņØĆ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
ļŖö ņČ£ļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä ņØśļ»ĖĒĢśļ®░ ļ”¼ņĢ╝ĒöäļģĖĒöä ņĢłņĀĢņä▒ ņØ┤ļĪĀņØä ĻĖ░ļ░śņ£╝ļĪ£ ņ£ĀļÅäļÉ£ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ĒåĄĒĢśņŚ¼ ļ¦ż ņŗ£Ļ░äļ¦łļŗż ņŚģļŹ░ņØ┤ĒŖĖļÉ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Yavrucuk et al.(2002)ņØś ņŚ░ĻĄ¼ļź╝ ņ░ĖĻ│ĀĒĢśņŚ¼ ņŗØ (12), (13)Ļ│╝ Ļ░ÖņØĆ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
ļŖö ņ×ģļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä, ļŖö ņČ£ļĀźĻ░ĆņżæĒ¢ēļĀ¼ņØä ņØśļ»ĖĒĢśļ®░ ļ”¼ņĢ╝ĒöäļģĖĒöä ņĢłņĀĢņä▒ ņØ┤ļĪĀņØä ĻĖ░ļ░śņ£╝ļĪ£ ņ£ĀļÅäļÉ£ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ĒåĄĒĢśņŚ¼ ļ¦ż ņŗ£Ļ░äļ¦łļŗż ņŚģļŹ░ņØ┤ĒŖĖļÉ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Yavrucuk et al.(2002)ņØś ņŚ░ĻĄ¼ļź╝ ņ░ĖĻ│ĀĒĢśņŚ¼ ņŗØ (12), (13)Ļ│╝ Ļ░ÖņØĆ ņĀüņØæņĀ£ņ¢┤ļ▓Ģņ╣ÖņØä ņé¼ņÜ®ĒĢśņśĆļŗż.

ņŚ¼ĻĖ░ņä£ ╬╗ļŖö ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖĻ░Ć ļ░£ņé░ĒĢśļŖö Ļ▓āņØä ļ░®ņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ ņé¼ņÜ®ļÉśļŖö Ļ░ÉņćĀĻ│äņłśņØ┤ļŗż. ╬ōVļ░Å ╬ōWļŖö ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖņØś ņØ┤ļōØņØ┤ļŗż. ŽāzļŖö Žāļź╝ ĒÖ£ņä▒ĒÖöĒĢ©ņłśņØś ļ│ĆņłśļĪ£ ĒÄĖļ»ĖļČä ĒĢ£ Ļ░ÆņØ┤ļŗż. P2ļŖö ņŗØ (14)ņŚÉ Ēæ£ĒśäļÉ£ ļ”¼ņĢ╝ĒöäļģĖĒöä ļ░®ņĀĢņŗØņØś ĒĢ┤ļź╝ ņØśļ»ĖĒĢ£ļŗż.

2.4 ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”ś
ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņØĆ ņżĆ ņĀĢņāüņāüĒā£ņŚÉ ļīĆĒĢ£ Ļ░£ļģÉņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņĀ£ĒĢ£ļÉśņ¢┤ņĢ╝ ĒĢśļŖö ļ│ĆņłśĻ░Ć ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢśņ¦Ć ņĢŖļÅäļĪØ ĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØä ņČöņĀĢĒĢśļŖö ļ░®ņŗØņØ┤ļŗż. ņżĆ ņĀĢņāüņāüĒā£ņŚÉņä£ļŖö ņóģļÅÖņÜöĻ░üņØś ņŗ£Ļ░äņŚÉ ļīĆĒĢ£ ļ»ĖļČäĻ░ÆņØ┤ ļ¬©ļæÉ 0ņØ┤ ļÉ£ļŗż. ņØ┤ļź╝ ņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (15)ņÖĆ Ļ░Öļŗż.

ņŗØ (15)ņÖĆ Ļ░ÖņØĆ Ļ░ĆņĀĢņØä ņČöņĀĢļ¬©ĒśĢņØś ļÅÖņŚŁĒĢÖņØä Ēæ£ĒśäĒĢ£ ņŗØ (3)ņŚÉ ņĀüņÜ®ĒĢśļ®┤ ņŗØ (16)ņØä ņ¢╗ņØä ņłś ņ׳ļŗż.

ņŚ¼ĻĖ░ņä£  ļŖö ļÅÖņĀü ĒŖĖļ”╝ Ļ░ĆņĀĢņØä ņĀüņÜ®ĒĢ£ ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢ£ļŗż. ņĀĢņØśņŚÉ ļö░ļź┤ļ®┤ ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äļŖö ļÅÖņĀü ĒŖĖļ”╝ņØś ļ░śņØæņØ┤ ņäżņĀĢļÉ£ ĒĢ£Ļ│äņ╣śņÖĆ Ļ░ÖņĢäņ¦ł ļĢīņØś ņĀ£ņ¢┤ņ×ģļĀźĻ░ÆņØä ņØśļ»ĖĒĢ£ļŗż. ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆņØä
ļŖö ļÅÖņĀü ĒŖĖļ”╝ Ļ░ĆņĀĢņØä ņĀüņÜ®ĒĢ£ ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢ£ļŗż. ņĀĢņØśņŚÉ ļö░ļź┤ļ®┤ ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äļŖö ļÅÖņĀü ĒŖĖļ”╝ņØś ļ░śņØæņØ┤ ņäżņĀĢļÉ£ ĒĢ£Ļ│äņ╣śņÖĆ Ļ░ÖņĢäņ¦ł ļĢīņØś ņĀ£ņ¢┤ņ×ģļĀźĻ░ÆņØä ņØśļ»ĖĒĢ£ļŗż. ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆņØä  , ĒĢśĒĢ£Ļ░ÆņØä
, ĒĢśĒĢ£Ļ░ÆņØä  ļĪ£ ņĀĢņØśĒĢśņ×É. ņŗØ (16)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆĻ│╝ ĒĢśĒĢ£Ļ░ÆņŚÉ ņāüņØæĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ņāüĒĢ£Ļ░Æ
ļĪ£ ņĀĢņØśĒĢśņ×É. ņŗØ (16)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆĻ│╝ ĒĢśĒĢ£Ļ░ÆņŚÉ ņāüņØæĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ņāüĒĢ£Ļ░Æ  Ļ│╝ ĒĢśĒĢ£Ļ░Æ
Ļ│╝ ĒĢśĒĢ£Ļ░Æ  ņØä Ēæ£ĒśäĒĢśļ®┤ ņŗØ (17), (18)Ļ│╝ Ļ░Öļŗż.
ņØä Ēæ£ĒśäĒĢśļ®┤ ņŗØ (17), (18)Ļ│╝ Ļ░Öļŗż.
ļŖö ļÅÖņĀü ĒŖĖļ”╝ Ļ░ĆņĀĢņØä ņĀüņÜ®ĒĢ£ ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ņØśļ»ĖĒĢ£ļŗż. ņĀĢņØśņŚÉ ļö░ļź┤ļ®┤ ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äļŖö ļÅÖņĀü ĒŖĖļ”╝ņØś ļ░śņØæņØ┤ ņäżņĀĢļÉ£ ĒĢ£Ļ│äņ╣śņÖĆ Ļ░ÖņĢäņ¦ł ļĢīņØś ņĀ£ņ¢┤ņ×ģļĀźĻ░ÆņØä ņØśļ»ĖĒĢ£ļŗż. ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆņØä , ĒĢśĒĢ£Ļ░ÆņØä ļĪ£ ņĀĢņØśĒĢśņ×É. ņŗØ (16)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņØś ņāüĒĢ£Ļ░ÆĻ│╝ ĒĢśĒĢ£Ļ░ÆņŚÉ ņāüņØæĒĢśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ņāüĒĢ£Ļ░Æ Ļ│╝ ĒĢśĒĢ£Ļ░Æ ņØä Ēæ£ĒśäĒĢśļ®┤ ņŗØ (17), (18)Ļ│╝ Ļ░Öļŗż.

ņ£äņØś ņŗØņØä ļ│┤ļ®┤, ļ╣äņäĀĒśĢ ļ░®ņĀĢņŗØņØś ņ¢æļ│ĆņŚÉ ĻĄ¼ĒĢ┤ņĢ╝ ĒĢśļŖö ļ│ĆņłśĻ░Ć ļōżņ¢┤Ļ░Ć ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ļ░śļ│ĄĻ│äņé░ņØä ņØ┤ņÜ®ĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Ļ│ĀņĀĢņĀÉ ļ░śļ│Ąļ▓Ģ(Fixed-point iteraion)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ┤ļź╝ ĻĄ¼ĒĢśņśĆļŗż. ļ░śļ│ĄĻ│äņé░ņØś ņ┤łĻĖ░Ļ░ÆņØĆ ļ░öļĪ£ ņĀä ņŖżĒģØņŚÉņä£ Ļ│äņé░ļÉ£ ĒĢ┤ļź╝ ņØ┤ņÜ®ĒĢśļŖö Ļ▓āņØ┤ ĒÜ©Ļ│╝ņĀüņØ┤ļŗżļŖö Unnikrishnan et al.(2003)ņØś ņŚ░ĻĄ¼ļź╝ ņØĖņÜ®ĒĢśņŚ¼ ļ│Ė ņŚ░ĻĄ¼ņŚÉ ņĀüņÜ®ĒĢśņśĆļŗż.
3. ņŗ£ļ«¼ļĀłņØ┤ņģś
ņ×ĀņłśĒĢ©ņØ┤ ņŗ¼ļÅäņĀ£ņ¢┤ļź╝ ĒĢśļŖö ĒĢ£ Ļ░Ćņ¦Ć ņāüĒÖ®ņŚÉ ļīĆĒĢ┤ ņóģļÅÖņÜöĻ░üņØś ĒĢ£Ļ│äļź╝ Ļ░üĻĖ░ ļŗżļź┤Ļ▓ī ņäżņĀĢĒĢśņśĆņØä ļĢī Ļ│äņé░ļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│äņÖĆ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Āļź╝ ļÅäņČ£ĒĢ┤ ļ│┤ļŖö ļ░®ļ▓Ģņ£╝ļĪ£ ņäżĻ│äļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØś ņä▒ļŖźņØä ĒÖĢņØĖĒĢ┤ ļ│┤ņĢśļŗż. ņŗ¼ļÅäļ│ĆĻ▓Įņŗ£ ļ░£ņāØĒĢśļŖö ņóģļÅÖņÜöĻ░üņØĆ ļīĆļץ 20┬░ ņĀĢļÅäņŚÉņä£ ņĀ£ĒĢ£ĒĢśļŖö Ļ▓āņØ┤ Ļ┤ĆļĪĆņØ┤ņ¦Ćļ¦ī, ņĄ£ļīĆ ņóģļÅÖņÜö Ļ░üņØĆ ņŗżņĀ£ņĀüņ£╝ļĪ£ Ļ▒░ņØś ņĀüņÜ®ļÉśņ¦Ć ņĢŖĻ│Ā ņ׳Ļ│Ā ļ│┤ĒÄĖņĀüņ£╝ļĪ£ ņóģļÅÖņÜöĻ░üņØä 5┬░~10┬░ļĪ£ ņĀ£ĒĢ£ĒĢśĻ│Ā ņ׳ļŗż(Burcher and Rydill, 1995). ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ņóģļÅÖņÜöĻ░üņØś ĒĢ£Ļ│äļź╝ ┬▒10┬░ņÖĆ ┬▒20┬░ļĪ£ ņäżņĀĢĒĢśņśĆļŗż. ņ×ĀņłśĒĢ©ņØś ņäĀņåŹņØĆ 12m/s, ņäĀļ»ĖņĀ£ņ¢┤ĒīÉņØś ņĄ£ļīĆĻ░üļÅäļŖö 30┬░ļĪ£ ņäżņĀĢĒĢśņśĆĻ│Ā ņĀ£ņ¢┤ĒīÉņØś ļÅÖņŚŁĒĢÖņØĆ ņŗØ (19)ņÖĆ Ļ░ÖņØĆ 1ņ░© ļÅÖņŚŁĒĢÖņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśņśĆļŗż.

ņŚ¼ĻĖ░ņä£ ņŗ£ņĀĢņłś TļŖö 0.5ļĪ£ Ļ░ĆņĀĢĒĢśņśĆļŗż. ņ┤łĻĖ░ņŗ¼ļÅä 150mņŚÉņä£ ļ¬®Ēæ£ņŗ¼ļÅä 50mĻ╣īņ¦Ć 100mņØś ņŗ¼ļÅäļ│ĆĻ▓ĮņØä ĒĢśļŖö ņāüĒÖ®ņØä Ļ░ĆņĀĢĒĢśņśĆĻ│Ā, ņØ┤ ļĢī ļ░£ņāØĒĢśļŖö ņĄ£ļīĆ ņóģļÅÖņÜöĻ░üņØś Ēü¼ĻĖ░Ļ░Ć ņĢĮ 14┬░Ļ░Ć ļÉśļÅäļĪØ ņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż. ņŗ¼ļÅäņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļŖö Fig. 3Ļ│╝ Ļ░Öļŗż.
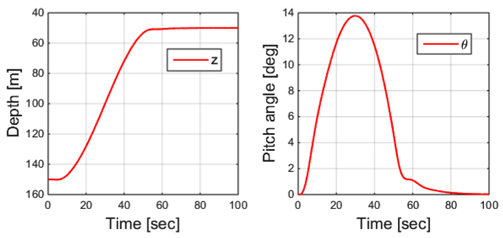
ņóģļÅÖņÜöĻ░üņØĆ ņäĀņłśĻ░Ć ņ£äļź╝ Ē¢źĒĢśļŖö Ļ▓ĮņÜ░ļź╝ ņ¢æņłśļĪ£, ņŗ¼ļÅäņØś Ļ▓ĮņÜ░ ņŚ░ņ¦ü ĒĢśļ░®ņØä ņ¢æņØś ZņČĢņ£╝ļĪ£ ņäżņĀĢĒĢśņśĆļŗż. ņ▓½ļ▓łņ¦Ė ĻĘĖļלĒöäļź╝ ĒåĄĒĢśņŚ¼ ņ×ĀņłśĒĢ©ņØ┤ ņśżļ▓äņŖłĒŖĖĻ░Ć Ļ▒░ņØś ņŚåņØ┤ ņ┤łĻĖ░ņŗ¼ļÅä 150mņŚÉņä£ ļ¬®Ēæ£ņŗ¼ļÅä 50mļĪ£ ņŗ¼ļÅäļ│ĆĻ▓ĮņØä ĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳Ļ│Ā, ņØ┤ļĢī ļ░£ņāØĒĢśļŖö ņĄ£ļīĆ ņóģļÅÖņÜöĻ░ü Ēü¼ĻĖ░Ļ░Ć ņĢĮ 14┬░ļØ╝ļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. Fig. 3ņØś ņŗ¼ļÅäņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģśĻ│╝ Ļ░ÖņØĆ ņāüĒÖ®ņŚÉņä£ ņóģļÅÖņÜöĻ░üņØś ĒĢ£Ļ│äļź╝ 10┬░ļĪ£ ņäżņĀĢĒĢśņśĆņØä ļĢī Ļ│äņé░ļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│äņÖĆ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Āļź╝ ļÅäņČ£ĒĢ┤ ļ│┤ņĢśļŗż. ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Ā vmargļŖö ņŗØ (20)Ļ│╝ Ļ░ÖņØ┤ ņĀĢņØśĒĢśņśĆļŗż.

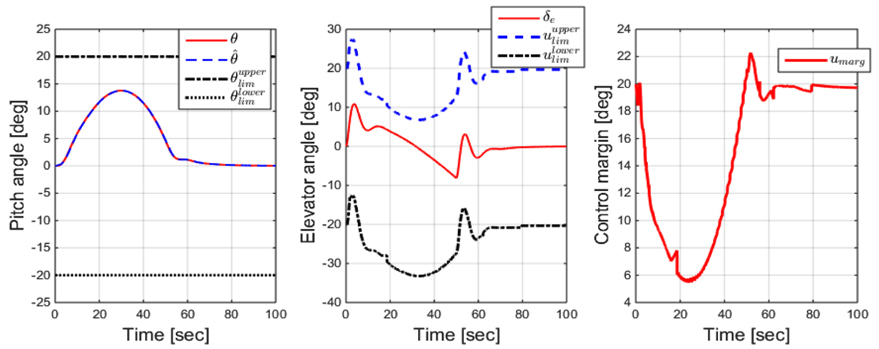
Fig. 4ņØś ņ▓½ļ▓łņ¦Ė ĻĘĖļלĒöäļŖö ņäżņĀĢļÉ£ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņÖĆ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░ü, ĻĘĖļ”¼Ļ│Ā ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░üņØä ļ│┤ņŚ¼ņżĆļŗż. ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░üņØä ļ│┤ļ®┤ ņĢĮ 16ņ┤łļČĆĒä░ 43ņ┤łĻ╣īņ¦Ć ņĢĮ 27ņ┤łĻ░ä ņĀ£ĒĢ£ļÉ£ ņóģļÅÖņÜöĻ░ü 10┬░ļź╝ ļ▓Śņ¢┤ļéśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ļæÉļ▓łņ¦Ė ĻĘĖļלĒöäļŖö ņĀ£ņ¢┤ņ×ģļĀźņØĖ ņäĀļ»ĖņĀ£ņ¢┤ĒīÉĻ░üĻ│╝ ĒĢ£Ļ│äņśłņĖĪņ£╝ļĪ£ Ļ│äņé░ļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äņØś ņāüŌŗģĒĢśĒĢ£Ļ░ÆņØä ļ│┤ņŚ¼ņżĆļŗż. Ļ▓░Ļ│╝ļź╝ ļ│┤ļ®┤ ņĢĮ 8ņ┤łļČĆĒä░ 38ņ┤łĻ╣īņ¦Ć ņäĀļ»ĖņĀ£ņ¢┤ĒīÉĻ░üņØ┤ ņĀ£ņ¢┤ņ×ģļĀźņØś ņāüĒĢ£Ļ░ÆņØä ņ┤łĻ│╝ĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ņäĖļ▓łņ¦Ė ĻĘĖļלĒöäļŖö Ļ│äņé░ļÉ£ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Āļź╝ ļ│┤ņŚ¼ņżĆļŗż. ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£Āļź╝ ļ│┤ļ®┤ ņ┤łĻĖ░ 10┬░ņŚÉņä£ ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░üņØ┤ ņĀ£ĒĢ£ļÉ£ Ļ░ÆņŚÉ Ļ░ĆĻ╣īņøī ņ¦Ćļ®┤ņä£ ņĀÉņĀÉ ņżäņ¢┤ļō£ļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņóģļÅÖņÜöĻ░üņØĆ ņĢĮ 16ņ┤łļČĆĒä░ ņäżņĀĢļÉ£ ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢśĻ▓ī ļÉśĻ│Ā ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£ĀļŖö ņĢĮ 8ņ┤łļČĆĒä░ ņØīņłśļź╝ Ļ░¢Ļ▓ī ļÉ£ļŗż. ņØ┤ļŖö ņ×ĀņłśĒĢ©ņØ┤ Ēśäņ×¼ņØś ņĀ£ņ¢┤ņ×ģļĀźņØä Ļ░Ćņ¦ĆĻ│Ā ņÜ┤ļÅÖĒĢ£ļŗżļ®┤ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢ£ļŗżĻ│Ā 8ņ┤łļØ╝ļŖö ņŗ£ņĀÉņŚÉ ļ»Ėļ”¼ ņśłņĖĪĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£ĀĻ░Ć ņØīņłśļź╝ Ļ░¢Ļ▓ī ļÉ£ļŗżĻ│Ā ĒĢ┤ņäØļÉ£ļŗż. ļ¦īņĢĮ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£ĀņØś Ēü¼ĻĖ░ņÖĆ Ļ▓ĮĒ¢źņä▒ņØä ĒĢ©ņłśļĪ£ ĒĢśļŖö ĒĢ£Ļ│äĒÜīĒö╝ ņĢīĻ│Āļ”¼ņ”śņØä ņ×æņä▒ĒĢśņŚ¼ ņĀüņÜ®ĒĢ£ļŗżļ®┤ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢ£ļŗżĻ│Ā ņśłņĖĪĒĢśļŖö 8ņ┤łļØ╝ļŖö ņŗ£ņĀÉ ņØ┤ņĀäņŚÉ ĒĢ£Ļ│äĒÜīĒö╝ļź╝ ņłśĒ¢ēĒĢĀ Ļ▓āņØ┤ĻĖ░ ļĢīļ¼ĖņŚÉ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äļź╝ ņ┤łĻ│╝ĒĢśņ¦Ć ņĢŖņØä Ļ▓āņØ┤ļØ╝ ņśłņāüļÉ£ļŗż.
Fig.┬Ā4
Control input limit and control margin calculation results in the depth control simulation (pitch limit : 10Ōäā)
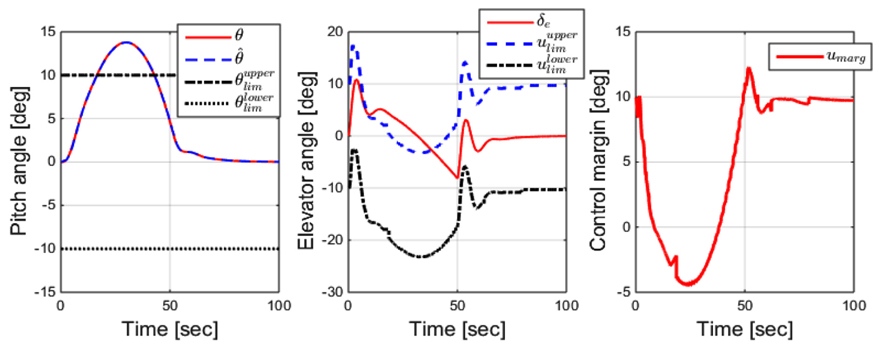
Fig. 5ļŖö ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒Ļ│╝ ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖļź╝ ļ╣äĻĄÉĒĢ£ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņżĆļŗż. Ļ▓░Ļ│╝ņŚÉņä£ ņĢī ņłś ņ׳ļō» ņĀüņØæņĀ£ņ¢┤ņŗĀĒśĖĻ░Ć ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä ņל ļ│┤ņāüĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ļ¬©ļŹĖļ¦ü ļČłĒÖĢņŗżņä▒ņØä ņל ļ│┤ņāüĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ Fig. 4ņŚÉņä£ ņČöņĀĢļ¬©ĒśĢņØś ņóģļÅÖņÜöĻ░ü ņØ┤ ņ×ĀņłśĒĢ©ņØś ņŗżņĀ£ ņóģļÅÖņÜöĻ░üņØä ņל ņČöņóģĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ļŗżņØīņ£╝ļĪ£ ņĢ×ņäĀ ņŗ¼ļÅäņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģśĻ│╝ ļÅÖņØ╝ĒĢ£ ņĪ░Ļ▒┤ņŚÉņä£ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äļź╝ 20┬░ļĪ£ ņäżņĀĢĒ¢łņØä ļĢīņØś ĒĢ£Ļ│äņśłņĖĪ Ļ│äņé░Ļ▓░Ļ│╝ļź╝ ļÅäņŗ£ĒĢ┤ ļ│┤ņĢśļŗż.
ņØ┤ ņ×ĀņłśĒĢ©ņØś ņŗżņĀ£ ņóģļÅÖņÜöĻ░üņØä ņל ņČöņóģĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ļŗżņØīņ£╝ļĪ£ ņĢ×ņäĀ ņŗ¼ļÅäņĀ£ņ¢┤ ņŗ£ļ«¼ļĀłņØ┤ņģśĻ│╝ ļÅÖņØ╝ĒĢ£ ņĪ░Ļ▒┤ņŚÉņä£ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äļź╝ 20┬░ļĪ£ ņäżņĀĢĒ¢łņØä ļĢīņØś ĒĢ£Ļ│äņśłņĖĪ Ļ│äņé░Ļ▓░Ļ│╝ļź╝ ļÅäņŗ£ĒĢ┤ ļ│┤ņĢśļŗż.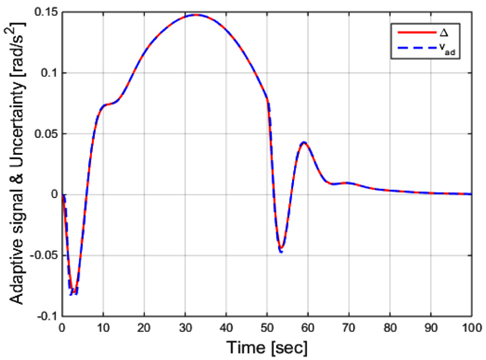
Ļ▓░Ļ│╝ņŚÉņä£ ņĢī ņłś ņ׳ļō» ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äĻ░Ć 20┬░ļĪ£ ņäżņĀĢļÉśņŚłĻ│Ā, ņóģļÅÖņÜöĻ░üņØ┤ ņäżņĀĢļÉ£ ĒĢ£Ļ│äļź╝ ļ▓Śņ¢┤ļéśņ¦Ć ņĢŖĻĖ░ ļĢīļ¼ĖņŚÉ ņĀ£ņ¢┤ņ×ģļĀźņØś ņŚ¼ņ£ĀĻ░Ć ņĀäņ▓┤ ņŗ£ļ«¼ļĀłņØ┤ņģś ņŗ£Ļ░äņŚÉ Ļ▒Ėņ│É ĒĢŁņāü ņ¢æņłśņ×äņØä ņĢī ņłś ņ׳ļŗż. Fig. 4 ~ Fig. 6ņŚÉ ņłśļĪØļÉ£ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļōżņŚÉņä£ ņĢī ņłś ņ׳ļō»ņØ┤, ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ņóģļÅÖņÜöĻ░üĻ│╝ ņäżņĀĢļÉ£ ĒĢ£Ļ│äņ╣śĻ░äņØś ņŚ¼ņ£Āļź╝ ņŗżņ¦łņĀüņ£╝ļĪ£ ņóģļÅÖņÜöĻ░üņØä ņĀ£ņ¢┤ĒĢśļŖö ņäĀļ»ĖņĀ£ņ¢┤ĒīÉņØś ņŚ¼ņ£ĀļĪ£ ļ¦ĄĒĢæ(Mapping)ņŗ£ņ╝£ ņżĆļŗż. ļö░ļØ╝ņä£, ĻĖ░ņĪ┤ ņŗ£ņŖżĒģ£ņØĆ ņóģļÅÖņÜöĻ░ü ĒĢ£Ļ│äņ╣śļź╝ ļäśņ¦Ć ņĢŖļÅäļĪØ ņ¦üĻ┤ĆņŚÉ ņØśņĪ┤ĒĢśņŚ¼ ņĀ£ņ¢┤ĒīÉņØä ņĪ░ņ×æĒĢ┤ņĢ╝ ĒĢśļŖö ļ░śļ®┤, ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØĆ ļ│┤ļŗż ņĀĢļ¤ēņĀüņØĖ ņłśņ╣śļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņĀ£ņ¢┤ Ļ░ĆļŖźĒĢśĻ▓ī ĒĢ©ņ£╝ļĪ£ņŹ© ņ×ĀņłśĒĢ© ņÜ┤ĒĢŁņĢłņĀĢņä▒ Ē¢źņāüņŚÉ ĻĖ░ņŚ¼ĒĢĀ ņłś ņ׳ļŗż.
4. Ļ▓░ ļĪĀ
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ņ×ĀņłśĒĢ©ņØś ņóģļÅÖņÜöĻ░üņØä ļ│┤ĒśĖĒĢĀ ņłś ņ׳ļŖö ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØä ņäżĻ│äĒĢśņśĆļŗż. ņ×ĀņłśĒĢ©ņØś ņŗżņĀ£ ņóģļÅÖņÜö ņÜ┤ļÅÖņØä ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņØĖĻ│ĄņŗĀĻ▓Įļ¦ØĻ│╝ LQRņĀ£ņ¢┤ĻĖ░ļ▓ĢņØ┤ ņé¼ņÜ®ļÉśņŚłļŗż. ĒĢ£Ļ│äļ│ĆņłśĻ░Ć ĒĢ£Ļ│äņ╣śļź╝ ļäśĻ▓ī ļÉśļŖö ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äļź╝ ņśłņĖĪĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”śņØä ņé¼ņÜ®ĒĢśņśĆļŗż. ņĀ£ņ¢┤ņ×ģļĀźĒĢ£Ļ│äļź╝ ĻĄ¼ĒĢśĻĖ░ ņ£äĒĢ£ ļ░®ņĀĢņŗØņØś ĒĢ┤ļŖö Ļ│ĀņĀĢņĀÉ ļ░śļ│Ąļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĻĄ¼ĒĢśņśĆļŗż. ņäżĻ│äļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØä Gertler ļ¬©ĒśĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņ×æņä▒ļÉ£ ņ×ĀņłśĒĢ© ņĪ░ņóģņÜ┤ļÅÖ ņŗ£ļ«¼ļĀłņØ┤ņģś ĒöäļĪ£ĻĘĖļשņŚÉ ņĀüņÜ®ĒĢśņśĆļŗż. ņĀüņÜ® Ļ▓░Ļ│╝ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ņØ┤ ņ×ĀņłśĒĢ©ņØś ņÜ┤ļÅÖņØä ņśłņĖĪĒĢśļ®░ ņĀ£ņ¢┤ņ×ģļĀźņØś ĒĢ£Ļ│äņÖĆ ņŚ¼ņ£Āļź╝ ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ņśłņĖĪĒĢśļŖö Ļ▓āņØä ņĢī ņłś ņ׳ņŚłļŗż. ĻĘĖļ¤¼ļéś ļ│Ė ņŚ░ĻĄ¼ļŖö ņ×ĀņłśĒĢ©ņŚÉņä£ ņĀĢņØśĒĢśļŖö ĒĢ£Ļ│äļ│Ćņłś ņżæ ņóģļÅÖņÜöĻ░üļ¦īņØä ļ│┤ĒśĖĒĢśļŖö ņŗ£ņŖżĒģ£ņØä ņäżĻ│äĒĢ£ Ļ▓āņØ┤ļ»ĆļĪ£, ņåŹļÅä ļ░Å ņŗ¼ļÅäņÖĆ Ļ░ÖņØĆ ļŗżļźĖ ĒĢ£Ļ│äļ│ĆņłśļÅä ļ│┤ĒśĖĒĢĀ ņłś ņ׳ļŖö ņŗ£ņŖżĒģ£ ņäżĻ│äņŚÉ ļīĆĒĢ£ ņČöĻ░ĆņĀü ņŚ░ĻĄ¼Ļ░Ć ĒĢäņÜöĒĢśļŗż. ĒĢ£Ļ│äĒÜīĒö╝ ņĢīĻ│Āļ”¼ņ”śņØä ņČöĻ░ĆĒĢśĻ│Ā ņÖäņĀä ļ¼┤ņØĖĒÖöĒĢśņŚ¼ ņĪ░ĒāĆņłśņØś ņĪ░ņóģņŚåņØ┤ ņäżņĀĢļÉ£ ņĀ£ĒĢ£ņØä ļäśņ¦Ć ņĢŖļŖö Ļ▓āņØä ļ│┤ņןĒĢśļŖö Carefree maneuvering ņŗ£ņŖżĒģ£ņØä ĻĄ¼ņČĢĒĢśļŖö Ļ▓āļÅä ņØśļ»Ėņ׳ņØä Ļ▓āņØ┤ļØ╝ ĒīÉļŗ©ļÉ£ļŗż. ļśÉĒĢ£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņé¼ņÜ®ĒĢ£ ļÅÖņĀü ĒŖĖļ”╝ ņĢīĻ│Āļ”¼ņ”ś ņÖĖņŚÉ Peak response estimationĻ│╝ Ļ░ÖņØĆ ļŗżļźĖ ņĢīĻ│Āļ”¼ņ”śņØä ņĀüņÜ®ĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļź╝ ņ¢╗ļŖöļŗżļ®┤, ņ×ĀņłśĒĢ©ņŚÉ ņĄ£ņĀüĒÖöļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ ņäżĻ│äļ░®ļ▓ĢņŚÉ ļīĆĒĢ£ ņ£ĀņØśļ»ĖĒĢ£ Ļ▓░Ļ│╝ļź╝ ļÅäņČ£ĒĢĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĻĖ░ļīĆļÉ£ļŗż.
ļČĆ ļĪØ
ņäżĻ│äļÉ£ ņÜ┤ĒĢŁņśüņŚŁ ļ│┤ĒśĖņŗ£ņŖżĒģ£ ņä▒ļŖźĻ▓Ćņ”ØņØä ņ£äĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØĆ ņä£ņÜĖļīĆĒĢÖĻĄÉņŚÉņä£ Ļ░£ļ░£ĒĢ£ ņ×ĀņłśĒĢ© ņĪ░ņóģņä▒ļŖźĒĢ┤ņäØ ĒöäļĪ£ĻĘĖļשņØĖ Submarine maneuvering simulation program(SMSP)ļź╝ ĒåĄĒĢśņŚ¼ ņłśĒ¢ēļÉśņŚłļŗż. ļīĆņāü ņ×ĀņłśĒĢ©ņØĆ Ļ░£ļģÉņäżĻ│ä ļŗ©Ļ│äņŚÉ ņ׳ļŖö ņ×ĀņłśĒĢ©ņ£╝ļĪ£ņä£, ĻĖĖņØ┤ ļīĆ ņ¦üĻ▓Įļ╣äĻ░Ć 10.9ņØ┤Ļ│Ā ņäĖņØ╝ņØś ļ”¼ļö®ņŚÉņ¦ĆĻ░Ć ņäĀļ»ĖļĪ£ļČĆĒä░ 0.75LņŚÉ ņ£äņ╣śĒĢ£ļŗż. ņ×ĀņłśĒĢ©ņØś ņĀ£ņ¢┤ļź╝ ņ£äĒĢśņŚ¼ ņäĀņłś ņĀ£ņ¢┤ĒīÉĻ│╝ ņäĀļ»ĖņŚÉ ņŗŁņ×ÉĒśĢņ£╝ļĪ£ ļÉ£ ņĀ£ņ¢┤ĒīÉņØä ņןņ░®ĒĢśĻ│Ā ņ׳ļŗż. SMSPļŖö ņŗØ (21)Ļ│╝ Ļ░ÖņØĆ 6ņ×Éņ£ĀļÅä ņÜ┤ļÅÖļ░®ņĀĢņŗØņØä ĻĖ░ļ░śņ£╝ļĪ£ ņ×æņä▒ļÉśņŚłļŗż.
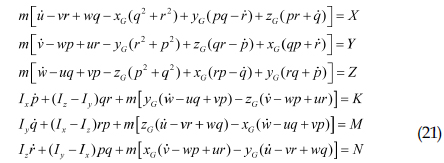
ņŗØ (21)ņØś ņÜ░ļ│ĆņØĆ ņ×ĀņłśĒĢ©ņŚÉ ņ×æņÜ®ĒĢśļŖö ņÖĖļĀźņØä ņØśļ»ĖĒĢ£ļŗż. SMSPņØś ņ×ĀņłśĒĢ©ņŚÉ ņ×æņÜ®ĒĢśļŖö ņÖĖļĀźņØĆ Gertler and Hagen(1967)ņØś ņŚ░ĻĄ¼ļź╝ ņ░ĖĻ│ĀĒĢśņŚ¼ ņ×æņä▒ļÉśņŚłĻ│Ā, ņØ┤ļź╝ ņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ (22)~(27)Ļ│╝ Ļ░Öļŗż.
ŌĆó ņĀäĒøäļÅÖņÜö:

ņŚ¼ĻĖ░ņä£, XHS = ŌłÆ(W ŌłÆ B)sin ╬Ė, 
ŌĆó ņóīņÜ░ļÅÖņÜö:
ņŚ¼ĻĖ░ņä£, YHS = +(W ŌłÆ B) cos ╬Ė sin ŽĢ, 
ŌĆó ņāüĒĢśļÅÖņÜö:
ņŚ¼ĻĖ░ņä£, ZHS = +(W ŌłÆ B) cos ╬Ė cos ŽĢ, 
ŌĆó ĒÜĪļÅÖņÜö:
ņŚ¼ĻĖ░ņä£, 

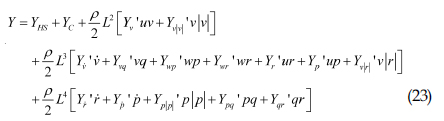
ŌĆó ņóģļÅÖņÜö:
ņŚ¼ĻĖ░ņä£, 

ŌĆó ņäĀņłśļÅÖņÜö:
ņŚ¼ĻĖ░ņä£, 
ļÅÖņ£Āņ▓┤ļĀź ļ¬©ĒśĢņØś ņ£Āņ▓┤ļĀź ļ»ĖĻ│äņłśļŖö ņłśņĪ░ļ¬©ĒśĢņŗ£ĒŚśĻ│╝ ĒÆŹļÅÖļ¬©ĒśĢņŗ£ĒŚśņØś Ļ▓░Ļ│╝ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļÅäņČ£ļÉśņŚłļŗż. ņĀĆĒĢŁņŗ£ĒŚś-ĒÅēļ®┤ņÜ┤ļÅÖņןņ╣śņŗ£ĒŚś(Planar motion mechanism test)-ņøÉņČöĒśĢ ņŗ£ĒŚś(Coning motion test)ņØ┤ ņłśņĪ░ņŚÉņä£ ņłśĒ¢ēļÉśņŚłĻ│Ā, ņŚ░ņä▒ņé¼ĒĢŁņŗ£ĒŚś-ņĀ£ņ¢┤ĒīÉņŗ£ĒŚśņØ┤ ĒÆŹļÅÖņŚÉņä£ ņłśĒ¢ēļÉśņŚłļŗż. ļ¬©ĒśĢņŗ£ĒŚś ļŹ░ņØ┤Ēä░ļĪ£ļČĆĒä░ ņ£Āņ▓┤ļĀź ļ»ĖĻ│äņłśļź╝ ļÅäņČ£ĒĢśĻĖ░ ņ£äĒĢ┤ ņĄ£ņåīņ×ÉņŖ╣ļ▓Ģ(Least square)-ĒÖ®ĻĖłļČäĒĢĀļ▓Ģ(Golden section method)-FourierĒĢ┤ņäØĻ│╝ Ļ░ÖņØĆ ļŹ░ņØ┤Ēä░ ĒĢ┤ņäØļ░®ļ▓ĢņØ┤ ņé¼ņÜ®ļÉśņŚłļŗż.




