타의 종류에 따른 선박의 파랑 중 직진성능에 관한 연구
Study on Variation in Ship's Course Keeping Ability under Waves Depending on Rudder Type
Article information
Trans Abstract
The variation in the course keeping ability in relation to rudder type is investigated using simulations with 3 different types of rudders (a normal rudder, normal rudder with a plate, and Schilling rudder) under wave conditions. The simulation is developed based on an MMG model with Kijima's regression model, along with the data from Son's experiments and Kose's experiments. A 3-D source distribution method is applied to calculate the source of the external wave forces for the simulation. The coefficients of an autopilot controller that may affect the course keeping ability are also estimated from the simulations with the different rudders. The course keeping ability is evaluated by comparing the forward distances while the ships are simulated with the rudders and autopilot controller.
1. 서 론
2012년 IMO(International maritime organization)에서 신조선박의 온실가스 감소에 대한 가이드라인이 설정되어 2013년 1월부터 신조선박은 에너지효율설계지수(EEDI, Energy efficiency design index)를 만족해야 한다(IMO, 2012a). 이에 따라 각 조선사들도 온실가스 감소에 대한 연구를 활발히 진행 중에 있다. IMO에서는 기존의 운항하는 선박에 대해서 에너지효율관리계획서(SEEMP, Ship energy efficiency management plan)와 에너지효율운항지표(EEOI, Energy efficiency operational indicator)의 작성을 권고하고 유럽에서는 선박에 대한 탄소세의 부과를 추진 중에 있는 등 현존하는 선박에 대한 온실가스 규제의 강화도 예상된다.
온실가스 규제에 대비하기 위해 선박에서의 신재생에너지(바람, 태양광 등)의 활용, 에너지세이빙 디바이스의 개발 등 여러방면에서의 연구가 진행되고 있다. 근래에 개발된 에너지세이빙 디바이스로는 크라운 덕트를 프로펠러 전류에 설치함으로써 프로펠러의 입사류를 제어하여 추진효율을 높이는 방법이 제시되었다(Lee et al., 2012). 외란하에서의 특수타에 의한 직진성능 향상에 대한 연구도 진행되었는데 Nagarajan et al.(2005)은 보통타와 마리나 Schilling타를 설치한 선박의 시뮬레이션을 통해 강풍 아래에서 마리나 Schilling타를 설치한 선박의 직진성능 향상을 확인하였다.
선박의 배출가스의 절감을 위해 선형을 최적화하고 추진성능을 향상시키는 것이 주요한 연구과제이나 실제 해상상태는 항상 외란(파도, 조류, 바람)이 존재하고 있으므로 외란의 영향아래에서 주어진 선형과 추진성능을 이용하여 목적지에 빠른 시간 내에 도달하는 것도 연료소비의 절감에 도움이 될 수 있다. 본 연구는 선박의 배출가스 절감에 관련한 기초연구로서 타의 종류에 따른 파랑 중 선박의 직진성능에 대해 검토하였다. 선박의 시뮬레이션을 구성하기 위해 Mathematical modeling group(MMG, 1980) 모델에 기반을 둔 조종운동방정식을 설정하고 선체유체력은 Kijima의 회귀식(Kijima and Nakiri, 2002), 프로펠러력과 타력은 Son과 Kose의 실험계수(Son and Nomoto, 1981, Kose et al., 1992)를 각각 사용하였다. 그리고 외란으로서 파랑강제력의 1차력을 시뮬레이션에 적용하였다. 오토파일럿 제어기의 계수를, 사용된 각각의 타에 대해 구한 후, 선박의 직진시뮬레이션을 구성하고 1,000초 동안의 직진거리를 비교 분석하여 타의 종류에 따른 선박의 파랑 중 직진성능을 검토하였다.
2. 모형선
2.1 선박의 모형
시뮬레이션에 적용된 선체의 모형은 175m의 컨테이너선박을 58.33배로 축소한 3m의 SR108모형선이 사용되었다. 시뮬레이션의 구성시 필요한 프로펠러와 타 등에 관련된 계수를 기존연구에서 모형실험을 통하여 구해진 실험계수를 인용하기 위해 모형선스케일의 시뮬레이션을 구성하였다. Table 1에서 시뮬레이션에 사용된 모형선의 주요제원을 나타낸다.
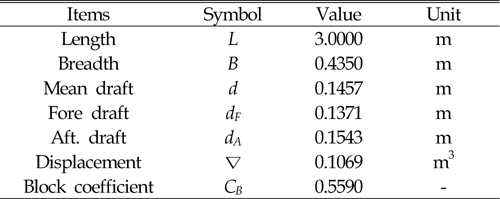
Principal dimension of ship model
3차원 특이점 분포법(3-D Source distribution method)을 사용하여 파랑강제력을 계산하기 위해 수면아래의 선체 표면에 663 개의 점으로 638개의 패널을 분포시켰다. Fig. 1은 파랑강제력의 계산을 위해 구성된 패널의 분포를 선체 밑면과 측면에서 바라본 모습이다.

Mesh distribution for wave force calculation
2.2 타의 모형
선박의 추력시스템으로 Son의 SR108모형실험(Son and Nomoto, 1981)에서 사용된 프로펠러 직경(DP)이 0.112m인 프로펠러가 사용되었다. 선박의 방향을 조정하는 타는 Kose가 실험한 보통타(Nomal rudder, NR)와 보통타의 아래면과 위면에 판을 덧된타(Nomal rudder with plate, NRP), 그리고 Schilling타입의 타(Schilling rudder, SR)가 사용되었다(Kose et al., 1992). Kose가 실험한 모형타의 개략도를 Fig. 2에서 보여준다. Fig. 2내에서 표시된 C는 타의 코드길이를 나타내고 있다. Kose가 제시한 타에 관한 실험계수를 쉽게 인용하기 위해 시뮬레이션에 사용된 타는 Kose가 실험한 타의 높이를 타의 종회비를 유지하면서 Son의 실험에서 사용된 프로펠러의 직경에 맞추어 축소하여 설정하였다. 설정된 프로펠러와 타의 제원을 Table 2에서 보여준다. 프로펠러의 직경에 타의 높이를 설정했기 때문에 타력에 주요한 요소인 타의 면적은 Son의 실험에서 사용된 타의 면적에 비해 87%로 축소되었다.

Schematic drawing of rudder models

Dimension of propeller and rudder model
3. 조종수학모델
3.1 좌표계
선박의 오토파일럿을 포함한 직진 시뮬레이션은 2방향의 병진운동(Surge, Sway)과 회전운동(Yaw)으로 이루어진 3자유도 운동시뮬레이션으로 구성하였다. 파의 영향을 고려한 시뮬레이션에는 횡요(Roll)을 포함한 운동해석이 더 정확한 결과를 볼 수 있다고 알려져 있으나, 본 연구에서는 타의 타입에 따른 Kose의 실험계수를 활용하기 위해 3자유도만의 시뮬레이션을 구성하였다. Fig. 3의 좌표계에서 선박의 시뮬레이션에 필요한 각 변수들의 방향을 정의하였다. 선박의 중심위치(x0, y0) 및 회두각(𝜓)과 공간고정좌표계 위에서의 파의 초기입사각(𝜓W)을 공간고정좌표계 0-x0-y0위에서 정의하였고, 선박의 병진속도성분(u, v)과 회전속도 성분(r), 선박에 작용하는 힘(X,Y)과 모멘트(N)의 방향, 사항각(𝛽)과 라다각도(𝛿)를 선체고정좌표계 0-X-Y에서 정의하였다.
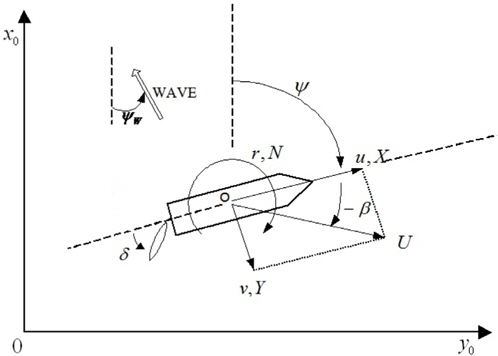
Coordinate system
각각 다른 방법에 의해 추정된 선체, 프로펠러와 타에 관한 계수들을 사용하여 시뮬레이션의 구성을 위해 MMG모델에 기반을 둔 무차원화된 3자유도 조종운동방정식인 식 (1)을 사용하였다(Kijima and Nakiri, 2002, Nagarajan et al., 2008). 식 (1)에 사용된 무차원 변수와 유차원 변수와의 관계를 물의 밀도(ρ), 선체의 길이, 흘수, 선박의 속도(U= )을 사용하여 식 (2)에서 정의하였다.
)을 사용하여 식 (2)에서 정의하였다.

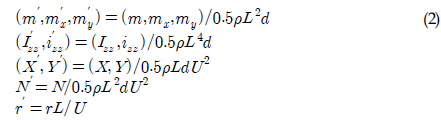
속도성분의 시간미분인 가속도와 각가속도의 무차원 값은 식 (1) 안에서의 각각  과
과  로 정의되고, 식 (2)의 m, mx, my는 각각 선박의 질량, x축방향, y축방향의 부가질량, Izz, izz은 z축에 대한 질량관성모멘트와 부가질량관성모멘트를 나타낸다. 식 (1)의 우변의 선박에 작용하는 힘과 모멘트는 다시 식 (3)과 같이 성분별로 세분화하여 나타낼 수 있다. 식 (3)의 우변에 나타난 아래첨자 H, P, R, W는 각각 선체에 작용하는 유체력, 추력, 타력, 파강제력을 의미한다.
로 정의되고, 식 (2)의 m, mx, my는 각각 선박의 질량, x축방향, y축방향의 부가질량, Izz, izz은 z축에 대한 질량관성모멘트와 부가질량관성모멘트를 나타낸다. 식 (1)의 우변의 선박에 작용하는 힘과 모멘트는 다시 식 (3)과 같이 성분별로 세분화하여 나타낼 수 있다. 식 (3)의 우변에 나타난 아래첨자 H, P, R, W는 각각 선체에 작용하는 유체력, 추력, 타력, 파강제력을 의미한다.

3.2 선체에 작용하는 힘과 모멘트
식 (3)에서 아래첨자H로 표시된 선체주위의 유체로부터 선체의 운동에 따라 선체에 작용하는 유체력은 Kijima의 회귀식(Kijima and Nakiri, 2002)을 사용하여 계산하였다. 프로펠러로부터 선체에 작용하는 추력은 시뮬레이션에서 주어지는 프로펠러 회전수(n), 프로펠러 제원인 프로펠러 직경(DP), 프로펠러 전진비(J)의 함수인 프로펠러의 추력계수(KT)와 추력감소계수(tP)로 구성된 식 (4)로부터 구할 수 있다.

식 (4)를 구성하는 프로펠러의 추력계수와 프로펠러 유입속도(uP)를 구하기위해 Son의 실험계수를 포함한 식 (5)와 식 (6)으로 정리하였다. 그리고 프로펠러의 추력을 계산하기 위해 인용되어 시뮬레이션에 사용된 계수를 Table 3에서 정리하였다.
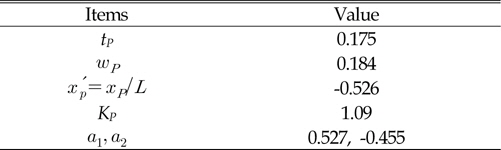
Coefficients for propeller from Son's expriment


타력의 계산을 위해 MMG수학모델에 적용되는 선체와 타의 상관관계계수를 포함하는 식 (7)을 사용하였다. 식 (7)내의 타에 대한 수직력(FN)은 식 (8)을 사용하여 구할 수 있다. 선체와 타의 상관관계계수는 선체와 타의 위치관계가 지배적이라는 가정아래 Son의 실험계수를 사용하였고, 프로펠러와 타의 상관관계를 정의하는 계수는 3가지의 타에 대하여 정리한 Kose의 실험계수를 인용하였다. 다만, 타에 수직력의 계산에 있어서는 Son과 Kose의 실험계수에서 정의되지 않은 계수는 Matsumoto의 문헌을 참고하였다(Matsumoto and Yumuro, 1987). 타력의 계산을 위해 시뮬레이션에서 사용된 계수를 Table 4에 정리하였다. Kose의 실험을 인용하여 타의 성능에 주요한 요소인 타직압력계수(CN)은 SR>NRP>NR의 순으로 정의되어 있어 선회성능 등의 조종성능에 있어서 SR이 우위에 있음을 예상할 수 있다.

Coefficients for rudder force calculation

선박에 작용하는 외란으로 파랑강제력은 1차파력만을 취하였으며, 선박이 항해 중에 임의위치와 임의시간에서 준평형상태에 있음을 가정하고 매 시간이력에서 계산하였다. 2차파력인 표류력, 조력 및 바람의 영향도 실제 선박에 주요한 외란으로 작용하지만, 선수각의 변화에 민감하게 영향을 미칠 것으로 예상되는 1차파력만을 시뮬레이션에 적용하였다. 선박에 작용하는 파랑강제력의 계산을 위해 3차원특이점분포법을 이용하여 작성한 In-house code를 사용하여 주파수영역에서 입사각 0°에서 180°까지 5°간격으로 파랑강제력의 전달함수를 구하고 이를 Fourier 역변환하여 임펄스 응답함수를 구하였다. 파강제력의 시간이력은 임펄스 응답함수를 컨벌루션적분을 이용하여 계산후 시뮬레이션에 적용하였다(Lee et al., 2003, Lee et al., 2005). 시뮬레이션에 적용된 파의 조건으로 IMO에서 에너지효율설계지표에 적용하기 위해 임의 가이드라인으로 제시한 불규칙파를 사용하였다(IMO, 2012b). 그리고, 파의 초기입사각에 따른 타의 성능을 확인하기 위해 Table 5의 3 방향을 설정하였다. 모형선 스케일로 축척하여 시뮬레이션에 사용된 파의 제원을 Table 5에 정의하였다.
Wave condition for simulation
4. 시뮬레이션의 구성
4.1 선회, Zigzag 시뮬레이션
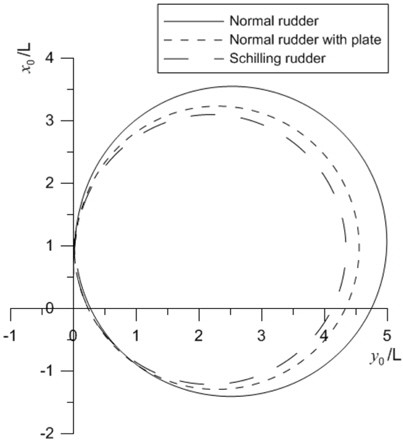
3장에서 구성된 선박의 기본적인 조종성능을 확인하기 위해 선회 및 Zigzag 시뮬레이션을 수행하였다. 35°선회시험의 결과를 Fig. 4에서 나타내었다. 선회성능은 SR의 경우가 가장 작은 선회반경을 보여주고 있고 NR의 경우는 선회성능이 다른 타의 경우에 비해서는 좋지 않으나 IMO기준인 Advance<4.5L과 Tactical diameter<5.0L의 기준(IMO, 2002)을 만족하는 성능을 보여주고 있다. 일반적인 컨테이너 선형에 비하여 큰 선회반경을 보여주고 있는데 이는 Kose의 실험계수를 사용하기 위해 타의 성능에 주요한 요소인 타의 면적을 기존의 Son의 타에 비해 13%를 줄임으로서 발생하는 선회성능의 감소가 원인이 된다.
Results of 35° turning simulations
Fig. 5에 보여진 20° Zigzag 시뮬레이션의 결과를 보면 3th Overshoot angle까지 SR의 경우가 가장 빨리 진행되었고, 근소하지만 다른 타의 경우에 비해 더 작은 Overshoot angle을 보여주었다. NR의 경우는 상대적으로 Overshoot angle이 크기는 하지만, IMO 기준인 First overshoot angle<25°를 만족하는 결과를 보여주고 있다.

Results of 20° zigzag simulations
4.2 오토파일럿
파랑 중 선박의 직진성능 시험을 위해 오토파일럿 제어기를 시뮬레이션에 설정하였다. 타각을 제어하는 제어기의 수학모델은 Proportional integral differential(PID)타입의 식 (9)가 사용되었다.

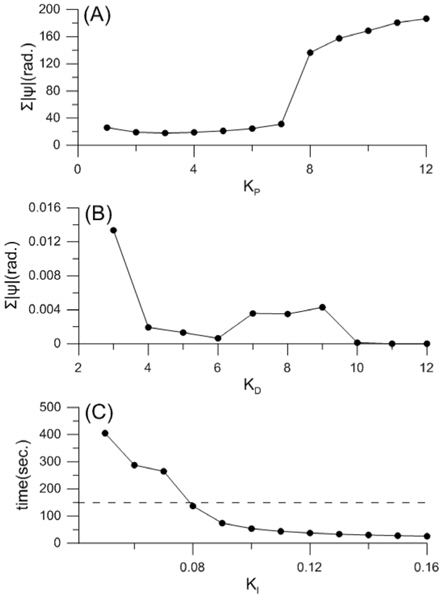
식 (6)에서 𝜓d는 목표선수각, Yd는 목표 y0좌표 그리고, KP, KD, KI는 오토파일럿 제어기의 계수를 나타낸다. KP를 구하기 위해 임의의 KP, KD=0, KI=0에서 외란이 없는 상태에서 초기선수각 30°와 목표선수각 0°를 설정하고 150초 동안 0.1초간격으로 직진시뮬레이션을 수행하였다. 각 스텝에서 계산된 선수각의 절대값의 합을 Fig. 6 (A)과 같이 도식화하고 가장 작은 값을 나타내는 KP를 취하였다. 그리고, 앞서 설정된 KP와 임의의 KD를 위의 같은 초기조건 아래에서 시뮬레이션을 수행하고 최초로 선수각이 0°를 지난 뒤의 선수각의 절대값을 합을 Fig. 6 (B)와 같이 도식화한 후 첫번째 저점(Fig. 6 (B)의 가로축 6부근)의 KD값을 2차원 Curve Fitting을 사용하여 구하였다. KI를 구하기 위한 계산과정은 먼저 설정된 KP, KD와 함께 임의의 KI를 제어기의 계수로 설정하고 초기선수각 0°와 초기 y0좌표를 L로 설정한 뒤 y0=0으로 복귀하는 시간이 150초(실선기준 19분정도)인 KI를 Fig. 6 (C)와 같이 구하였다. 시뮬레이션에 사용된 각 타에 대해 구하여진 오토파일럿 제어기의 계수를 Table 6에 나타내었다.
Preditions of autopilot coefficients with normal rudder

Autopilot coefficients for rudderl
5. 파랑 중 직진시뮬레이션
3.2에서 서술한 불규칙파의 조건아래에서 초기속도 1.627m/s, 프로펠러 고정회전수 15.1rps를 초기조건으로 설정하고 오토파일럿 제어기를 포함한 1,000초 동안의 직진시뮬레이션을 수행하였다. 추가제한조건으로 타의 최대최대각도를 ±10°, ±20°, ±30°의 3가지 경우로 설정하였다. Table 7에서 제한조건을 최대사용타각 ±30°로 적용한 시뮬레이션의 결과인 x0축방향의 주행거리를 L로 무차원화된 값을 나타내었다.
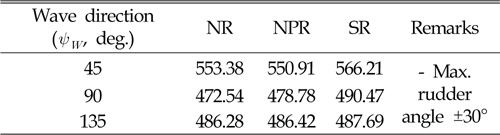
x0/L after 1,000 seconds simulations with wave
1000초 동안의 시뮬레이션 후 직진거리 x0를 살펴보면 파의 초기입사각이 45°의 경우가 횡파(90°)의 경우 보다 더 나은 직진거리를 보여주고 있다. 타의 종류에 따른 직진거리 결과를 살펴보면 계산된 파의 모든 방향에서 타직압력계수가 가장 큰 SR의 경우가 더 나은 직진거리를 보여주고 있다. 하지만, 파의 초기입사각이 45°의 경우에서는 타직압력계수가 더 큰 NPR의 경우가 NR 경우보다 더 작은 직진거리를 보여주고 있다. 파의 초기입사각 45°의 경우의 선수각의 절대값의 평균 ( ), 타각의 절대값의 평균(
), 타각의 절대값의 평균( ), 선체유체력의 평균
), 선체유체력의 평균 타의 X방향 힘의 평균
타의 X방향 힘의 평균 그리고, 파랑 강제력의 X방향 힘의 평균
그리고, 파랑 강제력의 X방향 힘의 평균 를 Table 8에 정리하였다. Table 8을 보면, 타직압력계수(CN)가 큰 타의 경우 상대적으로 작은 타의 각도로 선박을 제어한 것을 확인할 수 있다. 그리고 선수각의 절대값의 평균을 보면 타직압력계수가 큰 타의 경우가 선박을 목표선수각(=0°)에 가깝게 유지하며 전진했음을 알 수 있다. 하지만 NPR의 경우 선체가 파로부터 받는 힘의 크기의 차가 있어 NR보다 더 작은 전진거리가 계산되었음을 할 수 있다. 이는 선수각 제어의 정도에 따라 고정좌표계에 고정된 파의 입사각으로부터 실시간으로 계산되는 선체고정좌표계에서의 파 입사각은 달라져 선박이 불규칙파로부터 받는 파랑강제력의 크기가 달라져 전진거리가 줄어든 것으로 판단된다.
를 Table 8에 정리하였다. Table 8을 보면, 타직압력계수(CN)가 큰 타의 경우 상대적으로 작은 타의 각도로 선박을 제어한 것을 확인할 수 있다. 그리고 선수각의 절대값의 평균을 보면 타직압력계수가 큰 타의 경우가 선박을 목표선수각(=0°)에 가깝게 유지하며 전진했음을 알 수 있다. 하지만 NPR의 경우 선체가 파로부터 받는 힘의 크기의 차가 있어 NR보다 더 작은 전진거리가 계산되었음을 할 수 있다. 이는 선수각 제어의 정도에 따라 고정좌표계에 고정된 파의 입사각으로부터 실시간으로 계산되는 선체고정좌표계에서의 파 입사각은 달라져 선박이 불규칙파로부터 받는 파랑강제력의 크기가 달라져 전진거리가 줄어든 것으로 판단된다.
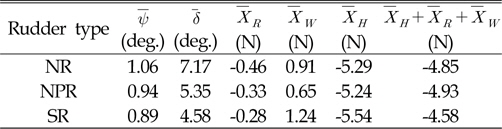
Mean values during simulations with 45° wave direction
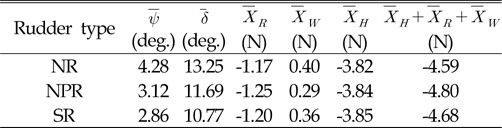
파의 초기입사각이 135°인 경우 시뮬레이션 중에 계산된 선수각의 절대값의 평균 (), 타각의 절대값의 평균(), 평균 평균 그리고, 평균을 Table 9에 나타내었다. 선체유체력 ( ), 타력(), 파강제력()의 합이 NR의 경우가 가장 크지만 Table 7에서는 가장 작은 전진거리를 보이고 있다. 이는 Table 9의 선수각의 절대값의 평균값이 NR의 경우가 가장 큰 값을 보이고 있는데 NR의 경우가 더 많은 타각을 쓰면서도 다른 타에 비해 효과적으로 선수각을 제어하지 못함으로서 생긴 결과로 보여진다.
), 타력(), 파강제력()의 합이 NR의 경우가 가장 크지만 Table 7에서는 가장 작은 전진거리를 보이고 있다. 이는 Table 9의 선수각의 절대값의 평균값이 NR의 경우가 가장 큰 값을 보이고 있는데 NR의 경우가 더 많은 타각을 쓰면서도 다른 타에 비해 효과적으로 선수각을 제어하지 못함으로서 생긴 결과로 보여진다.
Mean values during simulations with 135° wave direction
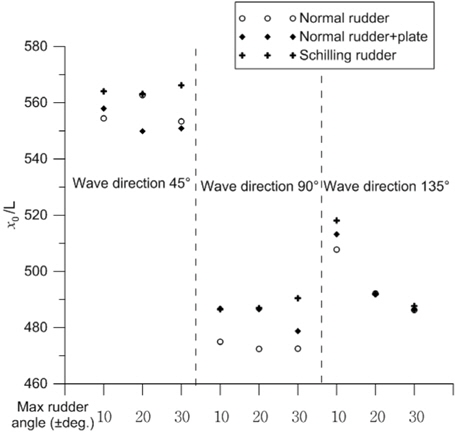
최대사용타각을 제한하여 시뮬레이션을 수행한 결과를 Fig. 7에 나타내었다. Fig. 7의 가로축은 최대사용타각이고 세로축은 1,000초 동안에 x0축방향으로 전진한 거리를 나타낸다. SR의 경우가 대부분의 계산결과에서 다른 타에 비해 대등하거나 더 긴 전진거리를 보여 주고 있으며 파의 초기입사각이 135°인 경우 최대사용타각이 더 작은 경우가 더 긴 전진거리를 나타내고 있다. Table 7과 같이 NR을 사용한 경우의 시뮬레이션에서 계산된 평균값을 Table 10에 나타내었다.
x0/L after 1,000seconds simulations with rudder angle limit
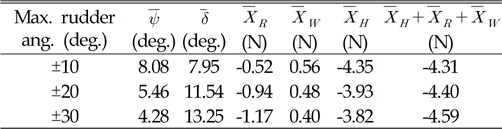
Mean values during normal rudder simulatons with 135° wave direction
Table 10의 최대사용타각 ±10°의 경우 선수각의 평균값은 다른 최대사용타각의 조건에 비하여 크게 나타나고 있으나, 평균타각이 최대사용타각 ±20°와 ±30°인 조건에 비하여 작아 타에 의한 항력이 줄어 들고 이로 인해 선체유체력 타력 파강제력의 합이 다른 조건에 비해 크게 되어 더 나은 전진거리를 진행한 것으로 판단된다. 이 같은 결과를 통하여 최대사용타각이 더 커질수록 효과적인 선수각의 제어가 되지만, 경우에 따라 타력에 의한 전진거리의 감소가 발생함을 확인할 수 있었다.
파강제력의 합이 다른 조건에 비해 크게 되어 더 나은 전진거리를 진행한 것으로 판단된다. 이 같은 결과를 통하여 최대사용타각이 더 커질수록 효과적인 선수각의 제어가 되지만, 경우에 따라 타력에 의한 전진거리의 감소가 발생함을 확인할 수 있었다.
6. 결 론
본 논문에서는 파랑 중 타의 종류에 따라 변화하는 선박의 직진성능을 시뮬레이션을 통하여 분석하였다. 시뮬레이션은 기존의 실험을 통하여 구하여진 실험계수 및 회귀식을 인용하여 구성하였고, 외력으로 파랑강제력을 3차원 특이점 분포법을 사용하여 계산하였다. 오토파일럿 제어기의 계수는 각각의 타를 사용한 반복시뮬레이션을 통하여 설정하였으며, 추가적으로 최대사용타각의 제한을 두어 시뮬레이션을 수행하였다. 파랑 중에서 1,000초 동안의 직진시뮬레이션을 수행한 뒤, 각각의 전진거리를 구하여 비교함으로서 타의 종류에 따른 직진성능을 검토하였다.
타직압력계수가 큰 Schilling타를 사용하는 경우 보통타에 비하여 더 작은 타각으로 선수각을 효과적으로 제어함으로서 같은 시간동안 더 나은 전진거리를 진행함을 확인하였다.
파의 초기입사각이 135°의 경우, 최대사용타각을 작게 설정한 시뮬레이션에서 더 나은 전진거리가 계산되었고 이는 사용타각의 적절성에 따라 타로 인한 항력이 줄어 선박의 전진성능을 향상시킬 수 있음을 확인하였다.
파랑 중 선박의 직진성능에 있어 타에 의한 효과적인 선수각의 제어와 타의 사용각도에 따른 타의 항력이 선박의 직진성능에 주요한 요소임을 확인하였다.
References
IMO (International Maritime Organization) MSC 76/23, 2002. Resolution MSC.137(76), standards for ship maneuverability. Report of the maritime safety committee 76th session-annex 6
. MSC 76/23, Resolution MSC.137(76), standards for ship maneuverability. Report of the maritime safety committee 76th session-annex 6 2002.IMO, 2012a. Guidelines on the Method of Calculation of the Attained Energy Efficiency Design Index for new Ships. Resolution MEPC. 212(63)
. Guidelines on the Method of Calculation of the Attained Energy Efficiency Design Index for new Ships. Resolution MEPC 2012;212(63)IMO, 2012b. Air Pollutionand and Energy Efficiency. Marine Environment Protection Committee 64th Sesson Agenda Item 4, MEPC 64/4/13
. Air Pollutionand and Energy Efficiency. Marine Environment Protection Committee 64th Sesson Agenda Item 4 2012.Kijima, K., Nakiri, Y., 2002. On the Practiacl Prediction Method for Ship Maneuvering Characteristics. Transactions of the West-Japan Society of Naval Architects, 105, 21-31
. Kijima K., Nakiri Y.. On the Practiacl Prediction Method for Ship Maneuvering Characteristics. Transactions of the West-Japan Society of Naval Architects 2002;105:21–31.Kose, K., Hosokawa, M., Yamada, H., Akifuji, K., 1992. A study on Performance Estimation of Special Rudders. Transactions of the West-Japan Society of Naval Architects, 84, 49-57
. Kose K., Hosokawa M., Yamada H., Akifuji K.. A study on Performance Estimation of Special Rudders. Transactions of the West-Japan Society of Naval Architects 1992;84:49–57.Lee, K., An, J., Yang, S., 2012. A study on the Development of Energy-Saving Device “Crown Duct”. Journal of Ocean Engineering and Technology, 26(5), 1-4
. Lee K., An J., Yang S.. A study on the Development of Energy-Saving Device “Crown Duct”. Journal of Ocean Engineering and Technology 2012;26(5):1–4.Lee, S., Jo, H., Kang, D., 2003. A Study on the Motion of a Single Point Moored Ship in Irregular Waves. Journal of Korean Navigation and Port Research, 27(1), 55-61
. Lee S., Jo H., Kang D.. A Study on the Motion of a Single Point Moored Ship in Irregular Waves. Journal of Korean Navigation and Port Research 2003;27(1):55–61. 10.5394/KINPR.2003.27.1.055.Lee, S., Lee, G., Hwang, S., Kang, D., 2005. Development of the Rudder Roll Control System of a Vessel in Irregular Waves. Journal of Korean Navigation and Port Research, 29(10), 839-845
. Lee S., Lee G., Hwang S., Kang D.. Development of the Rudder Roll Control System of a Vessel in Irregular Waves. Journal of navigation and port research 2005;29(10):839–845. 10.5394/KINPR.2005.29.10.839.Matsumoto, N., Yumuro, A., 1987. interference Effects of Hydrodynamics between Hull, Rudder and Propeller. Proceedings of the 4th Marine Dynamics Symposium on the Prediction of Ship Maneuverability and its Applications, Tokyo Japan, 93-131
. Matsumoto N., Yumuro A.. interference Effects of Hydrodynamics between Hull, Rudder and Propeller In : Proceedings of the 4th Marine Dynamics Symposium on the Prediction of Ship Maneuverability and its Applications. Tokyo Japan; 1987. p. 93–131.Mathematical Modeling Group (MMG), 1980. MMG Report V. Bulletin of the Society of Naval Architecture of Japan, 616, 565-576.
MMG Report V. Bulletin of the Society of Naval Architecture of Japan 1980;616:565–576.Nagarajan, V., Kang, D., Hasegawa, K., Nabeshima, K., 2008. Comparison of the Mariner Schilling Rudder and the Mariner rudder for VLCCs in Strong winds. Journal of Marine Science and Technology, 13, 24-39
. Nagarajan V., Kang D., Hasegawa K., Nabeshima K.. Comparison of the Mariner Schilling Rudder and the Mariner rudder for VLCCs in Strong winds. Journal of Marine Science and Technology 2008;13:24–39. 10.1007/s00773-007-0245-x.Son, K., Nomoto, K., 1981. On the Coupled Motion of Steering Rolling of a High Speed Container Ship. Journal of the Society of Naval Architects of Japan, 150, 232-244.
Son K., Nomoto K.. On the Coupled Motion of Steering Rolling of a High Speed Container Ship. Journal of the Society of Naval Architects of Japan 1981;150:232–244.