1. Introduction
2. Calculation of damping coefficient
3. Estimation of viscous damping coefficient using CFD
3.1 Governing equation
3.2 Numerical simulation method
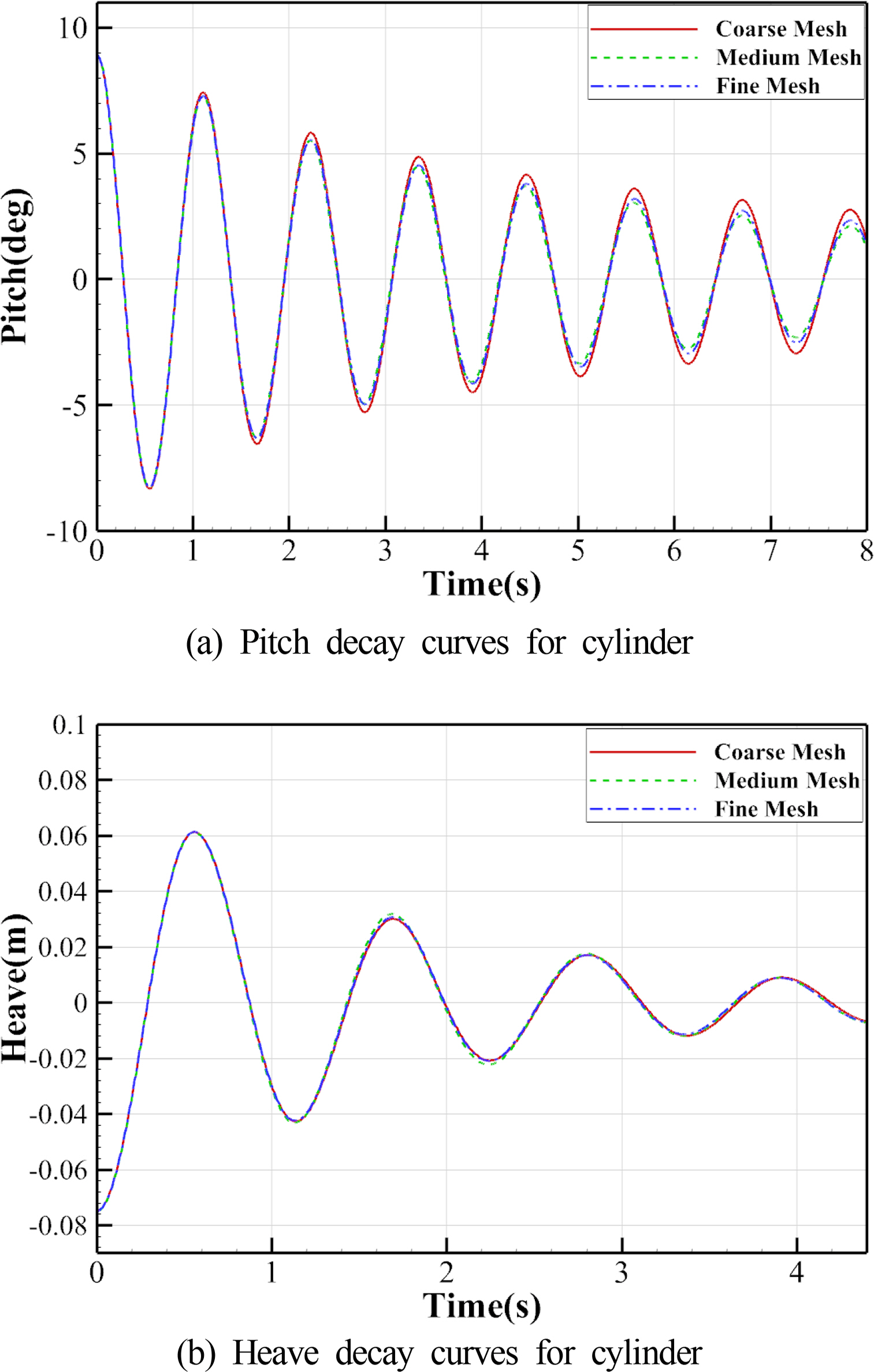
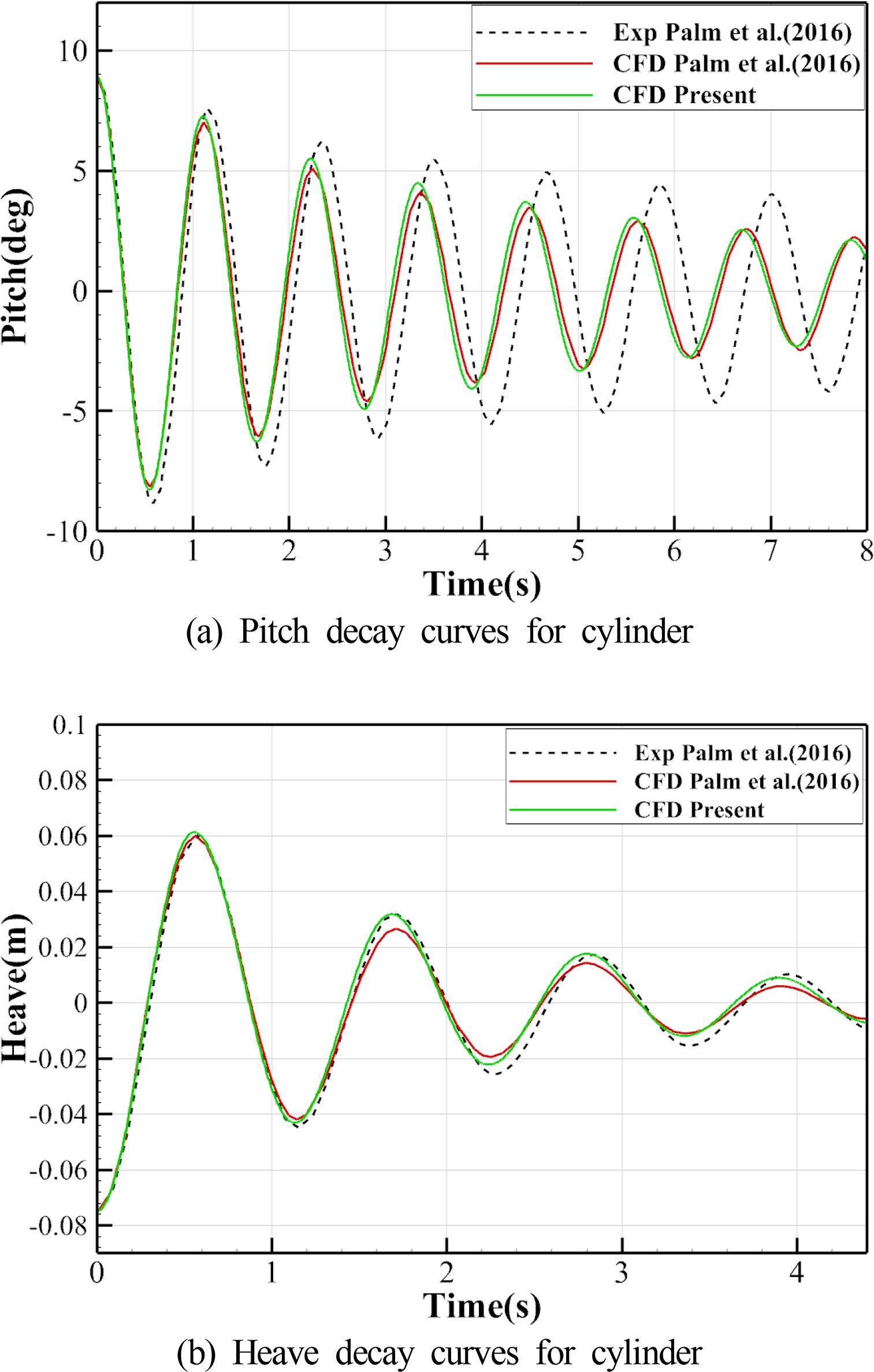
3.3 Verification simulation of free decay of circular cylinder
3.4 Free decay simulation of light buoy
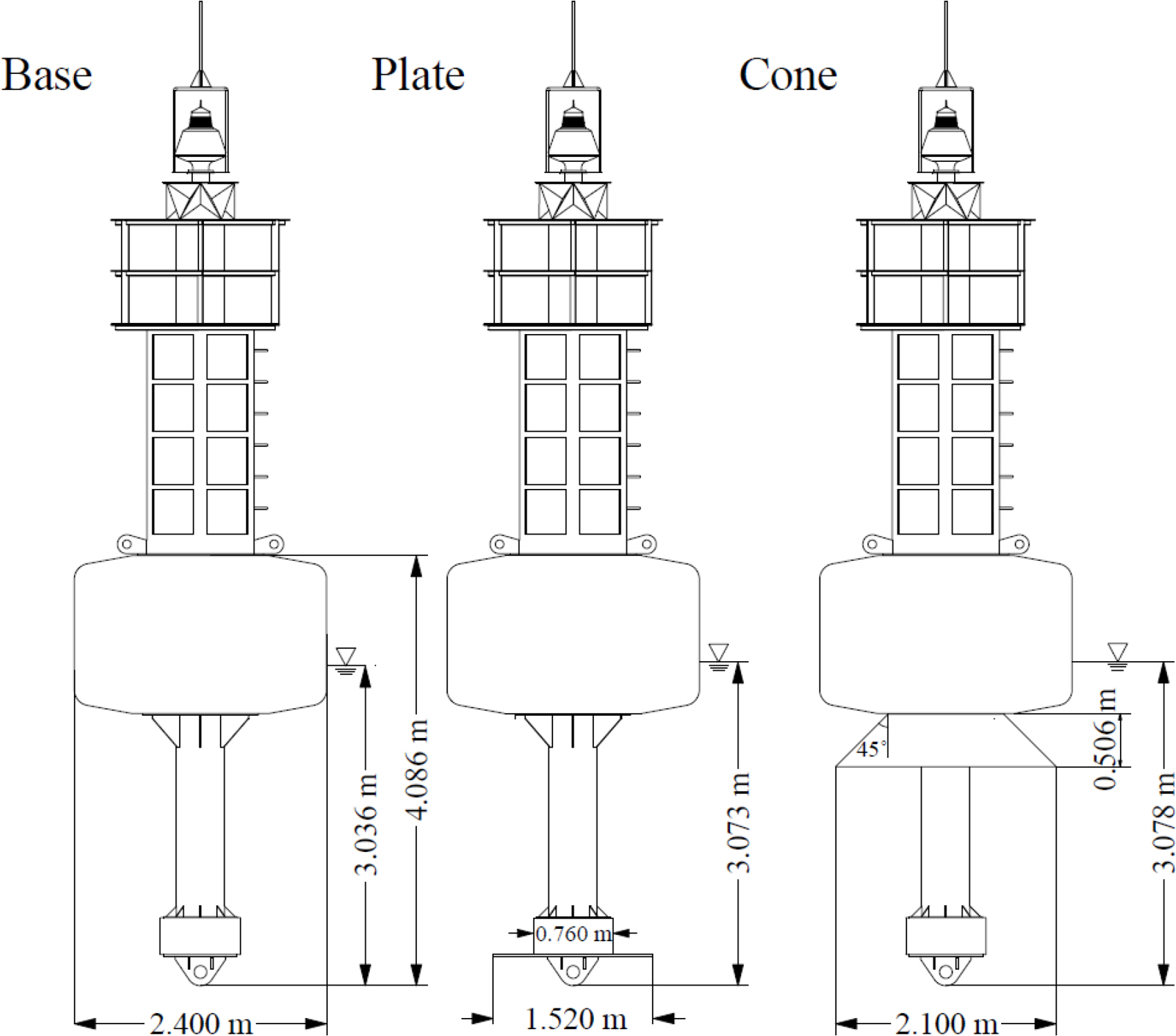
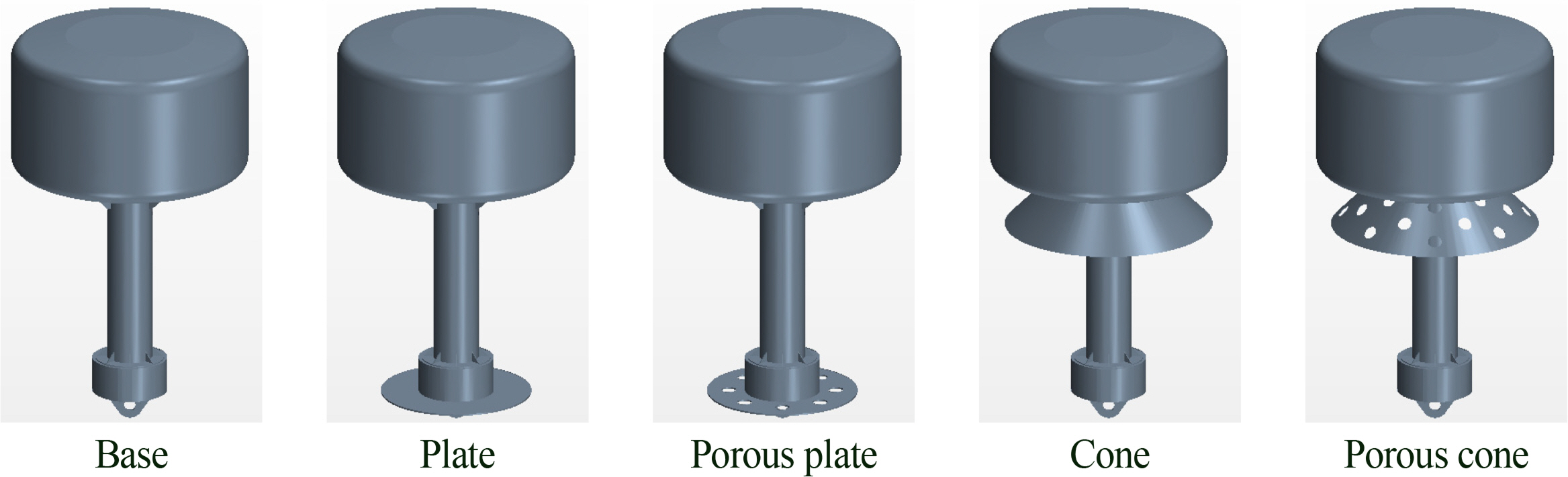
3.4.1 Target model
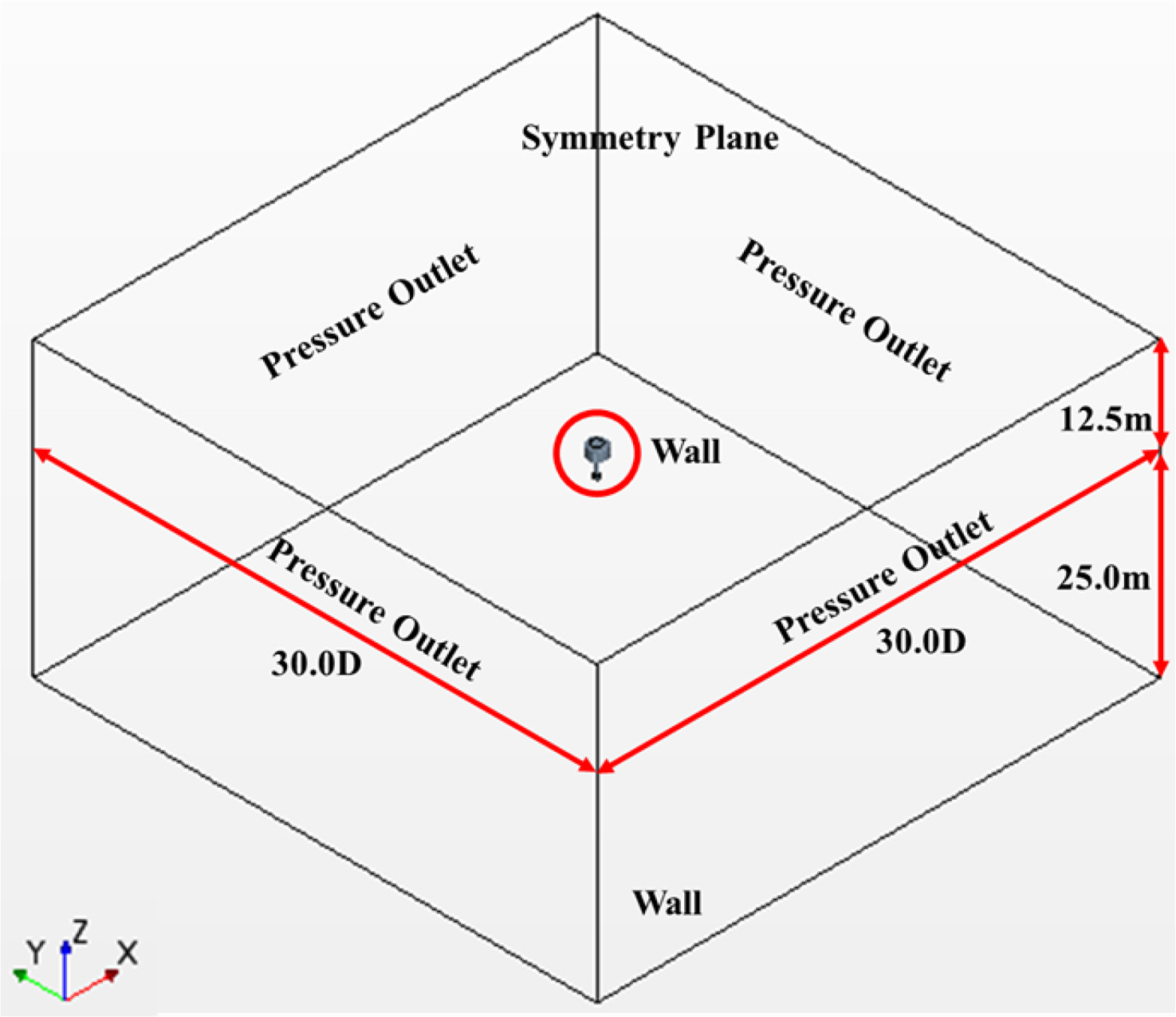
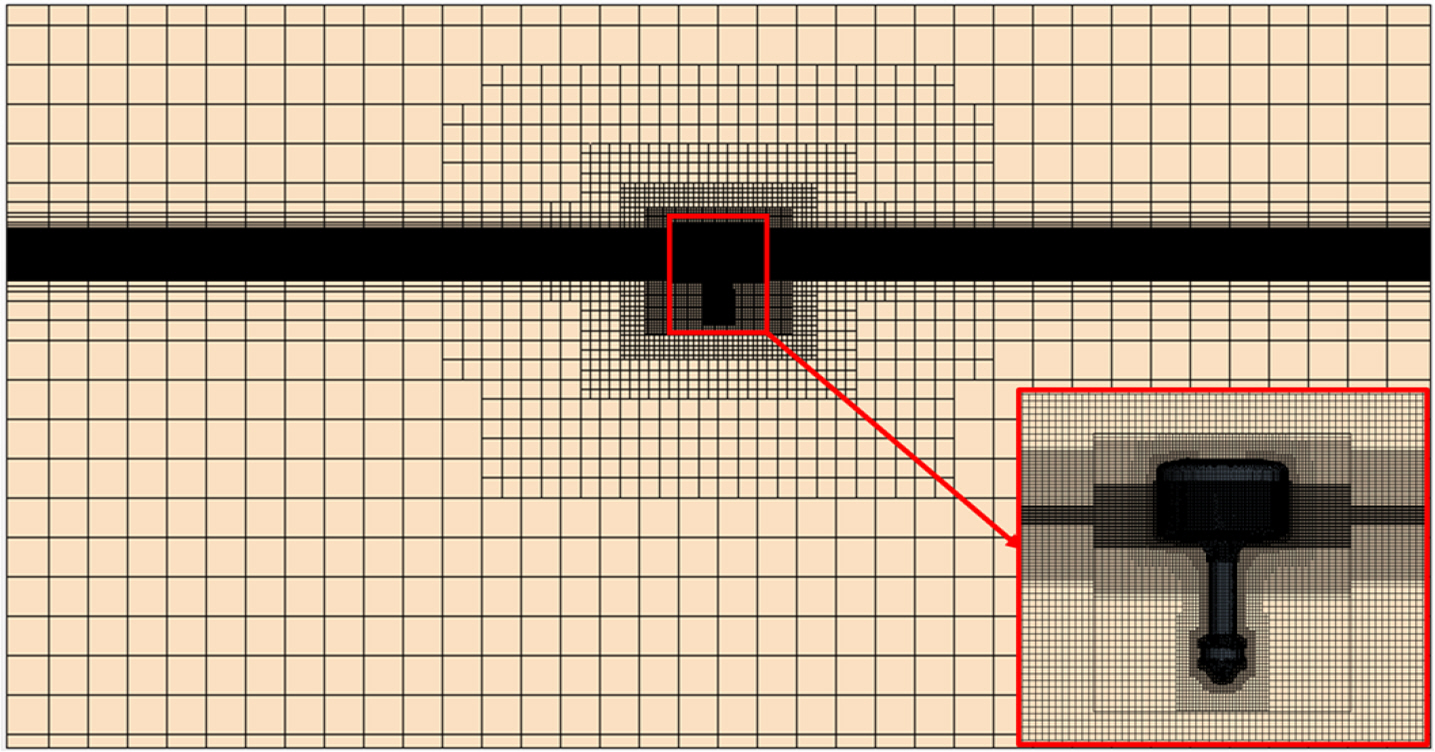
3.4.2 Computational domain, boundary conditions, and grid system
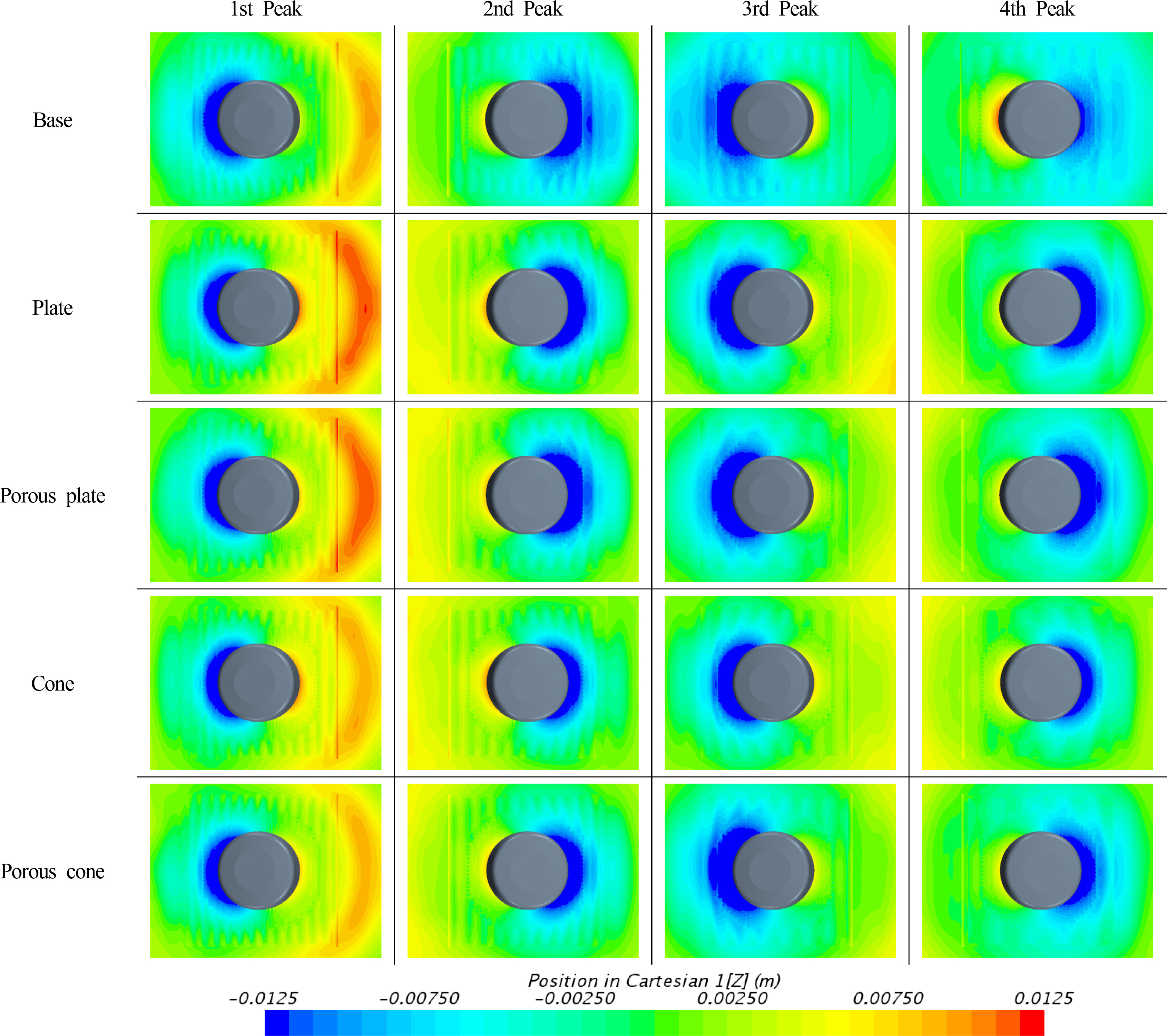
3.4.3 Result of numerical simulation
4. Estimation of motion performance
4.1 Estimated result of motion performance
5. Conclusion
For validation, a CFD simulation of the circular cylinder’s pitch and heave free decay was performed. The results were compared to the experimental results and other CFD results and were in good agreement with them.
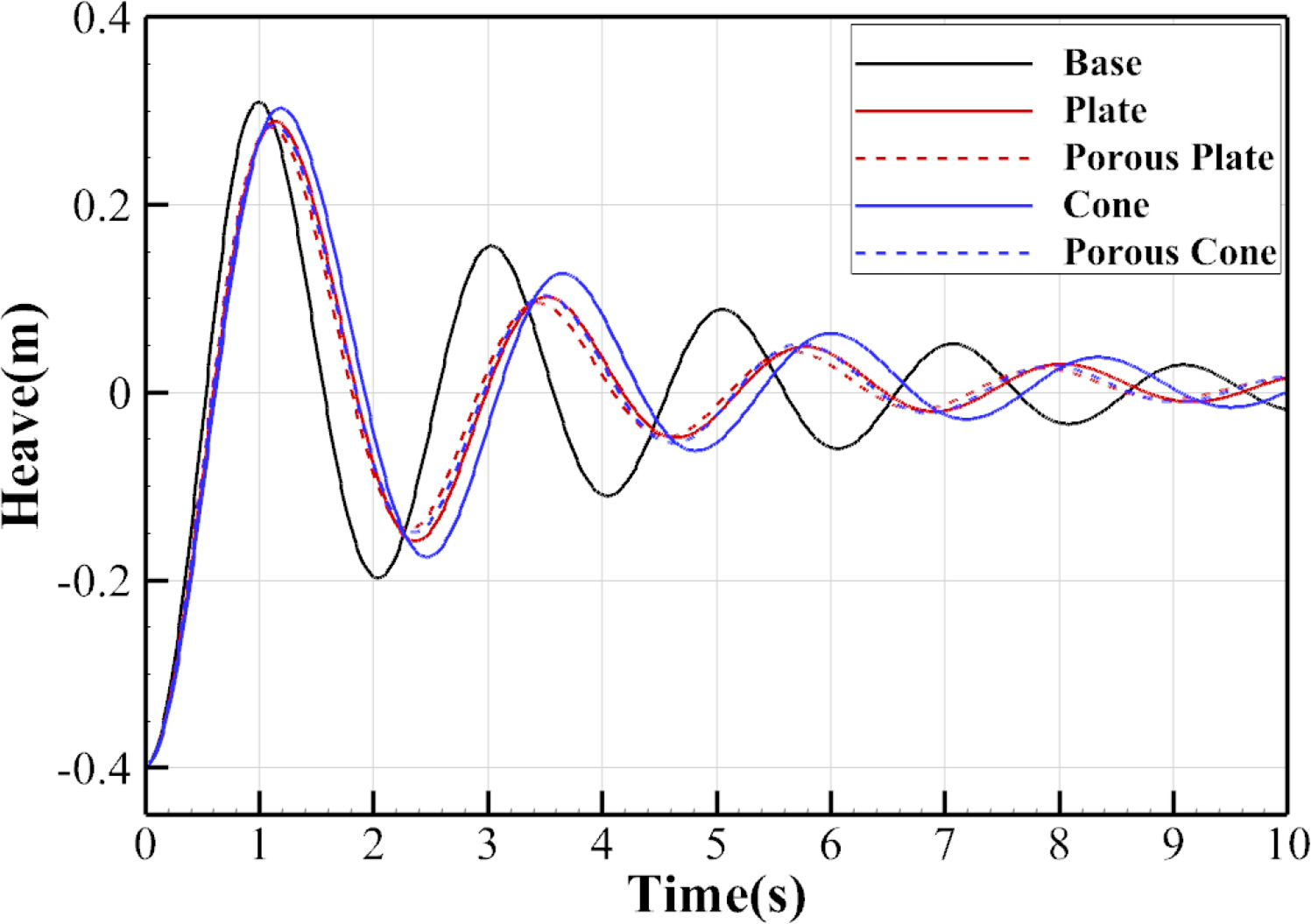
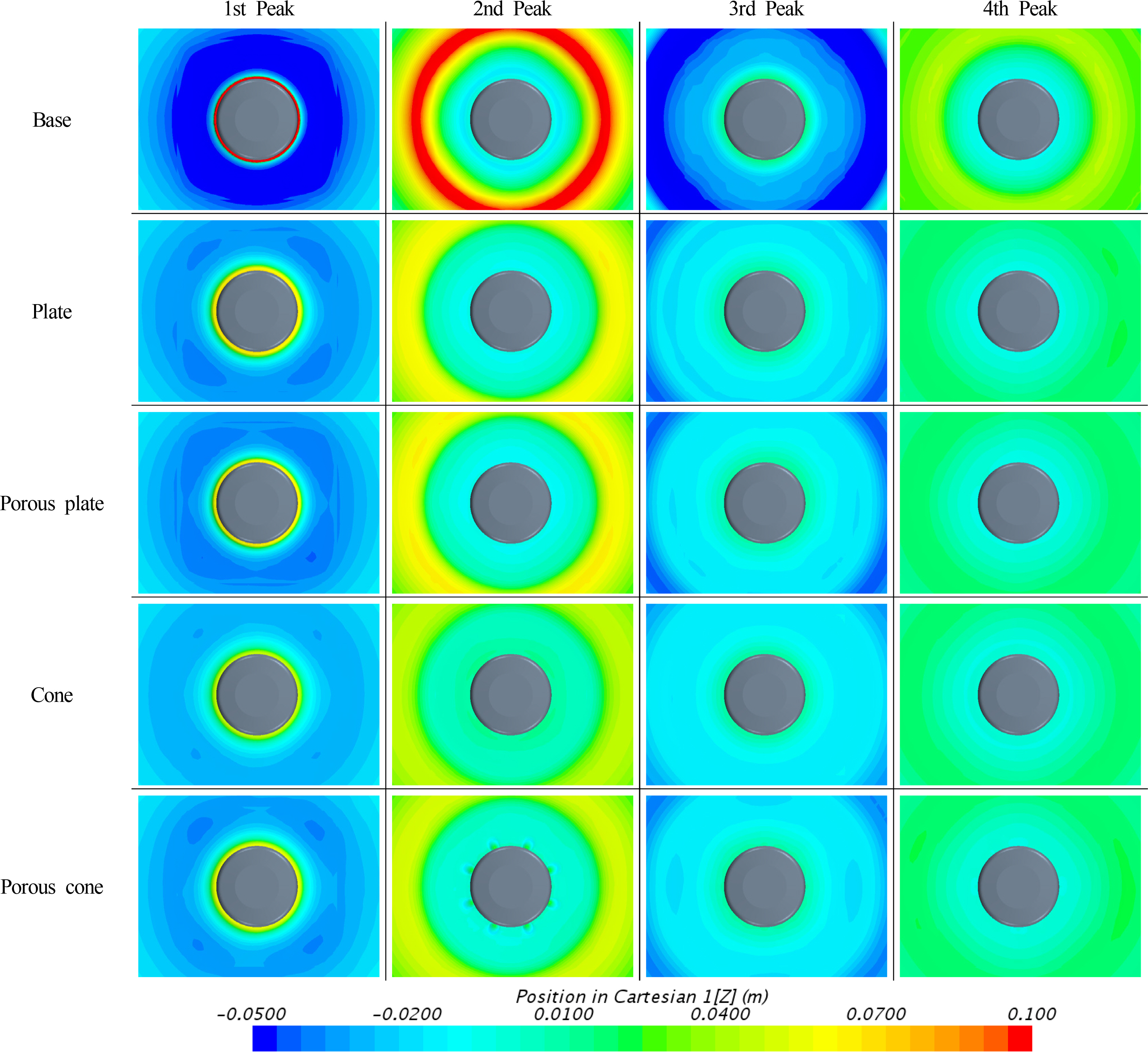
A CFD simulation of the free decay of the pitch and heave was performed for the base model without any appendage and for the plate, porous plate, cone, and porous cone models with the appendages installed, and each viscous damping coefficient was calculated. The damping coefficient was estimated to be increased by the installation of the appendage. The viscous damping coefficient accounted for most of the pitch damping coefficient, and the viscous damping and radiation coefficients were estimated to be at equivalent levels in the heave damping coefficient.
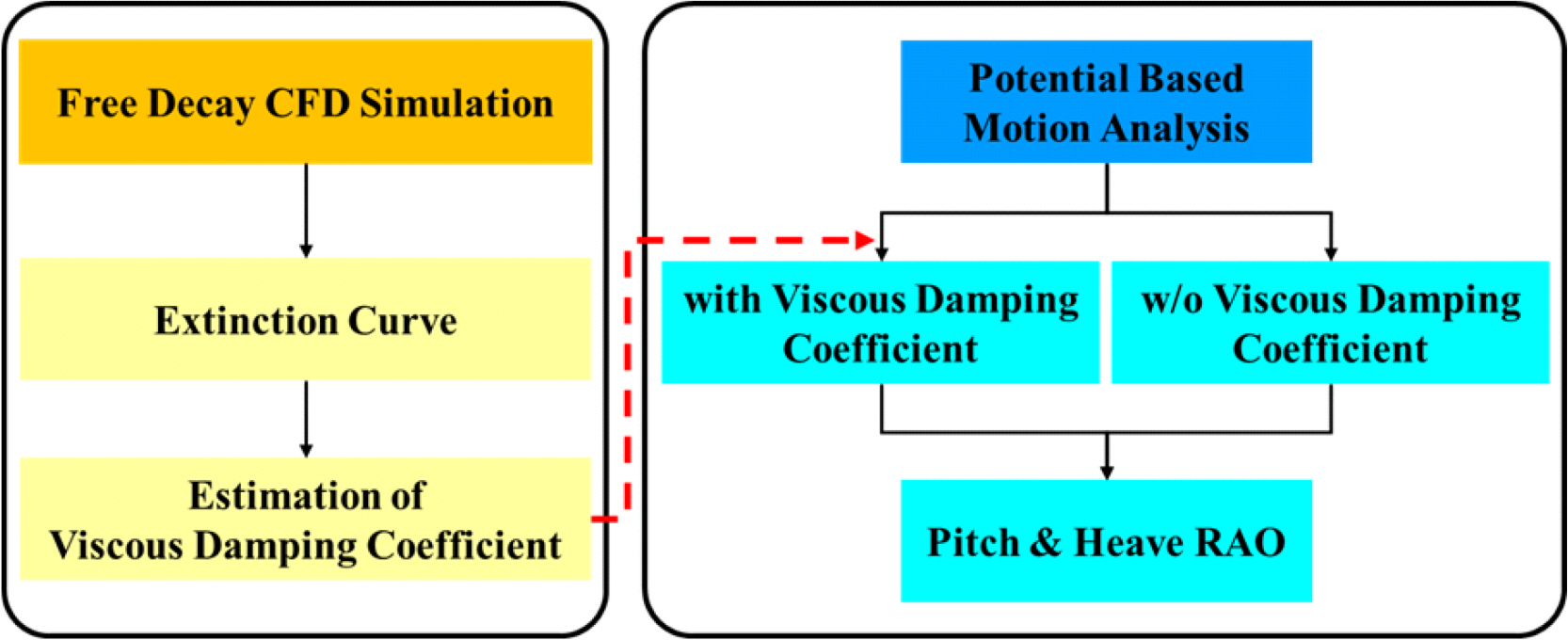
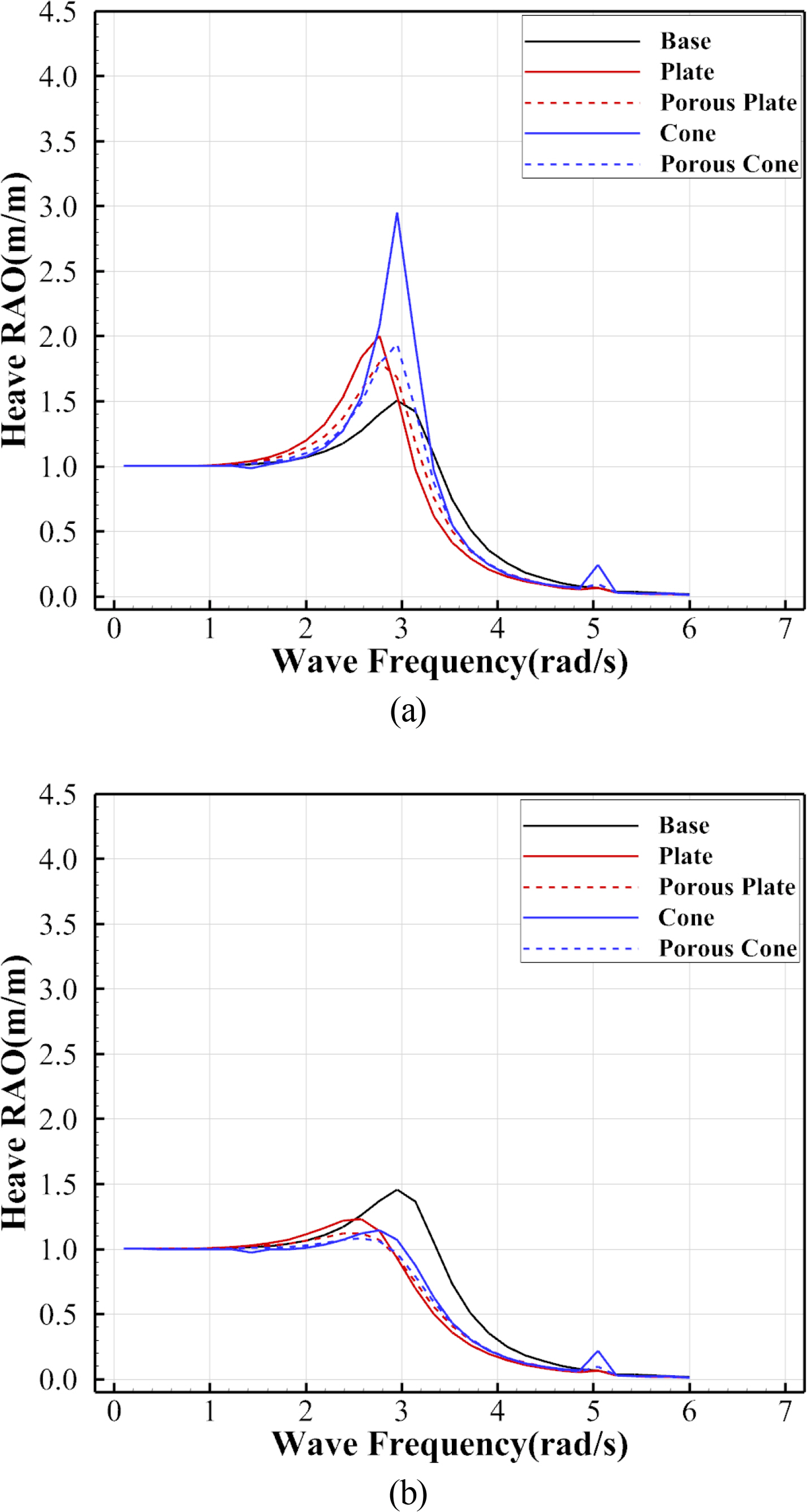
Potential-based motion analyses of cases with and without considering the viscous damping coefficient calculated by CFD were performed, and the results were compared. When considering the viscous damping coefficient, the RAO was significantly reduced near the natural frequency of each model.
The motion analysis of each model considering the viscous damping coefficient showed that the motion was reduced by the installation of the appendage. The maximum RAO values were estimated to have an ascending order of the porous plate, plate, porous cone, cone, and base for the pitch, and the ascending order of the porous cone, porous plate, cone, plate, and base for the heave.