


1. 서 론
최근 과학기술의 발전에 따른 에너지 수요증대와 육상자원의 고갈에 의한 해양 자원 탐사 및 해저 환경 탐사에 많은 연구가 이루어지고 있으며, 이로 인해 실용적이며 효율적인 해양탐사 장비의 개발이 필요한 실정이다. 해양 탐사 장비들 중에서 현재까지 가장 널리 사용되고 있는 것은 원격제어 무인잠수정과 자율 무인잠수정과 같은 형태이지만, 그 활동범위가 매우 제한적이거나 수중에서의 운용시간이 매우 짧다는 제약이 있다. 이러한 제한적인 활동범위와 운용시간을 극복하면서 매우 넓은 범위의 해양 탐사를 오랜 시간동안 자율적으로 수행하기 위해서는 수중에서 무인잠수정이 운항하는 데 필요한 전력을 최소한으로 소비하도록 하는 시스템 개발이 필요하다.
이러한 목적을 위해서 추진기를 통해 추진력을 얻는 무인잠 수정과는 달리 선체 내부의 자세제어장치와 부력조절장치로 각각 동체의 자세와 부력을 조절함으로써 추진력을 얻을 수 있는 형태의 무인 수중글라이더에 대한 연구들이 최근 들어 활발히 진행되고 있다. 무인 수중글라이더의 경우 독립된 추진체가 없기 때문에 무인잠수정에 비해 약 30배 이상의 소비효율을 낼 정도로 제한된 동력으로 운용시간과 운용거리를 극대화 할 수 있는 장점이 있다. 이러한 장점을 가지고 있는 수중글라이더에 다양한 탐사 장비를 탑재함으로써, 해양 환경을 조사함에 있어 많은 인력과 장비의 투입을 대체할 수 있는 플랫폼으로 그 필요성이 더욱 대두되고 있다.
해외에서는 대표적으로 Slocum, Spray, Seaglider, X-Ray와 같은 다양한 형태의 무인 수중글라이더를 개발하였다(Eriksen et al, 2001; Sherman et al, 2001; Webb et al, 2001). 이러한 플랫폼에 여러 가지 음향장비 및 센서를 장착하여 넓은 범위의 해저 지형 또는 해양 환경 자료를 수집하거나, 대서양 횡단 실험을 수행하는 등 해양생태학 및 해양환경학에 응용할 수 있는 실해역 실험들을 수행하고 있다(Fiorelli et al, 2006; Leonard et al, 2010; Rudnick et al, 2004; Smith et al, 2011). 이러한 무인 수중글라이더는 학문적인 연구뿐만 아니라 수중통신 및 위성통신을 이용한 잠수함등의 통신게이트웨이로서 활용하는 등 군사용으로도 매우 중요한 활용도를 보이고 있기 때문에, 무인 수중 글라이더 분야에 대한 연구를 활성화함으로써 국가적으로 경쟁력을 높일 필요가 있다. 반면 국내에서는 극소수의 연구 결과를 제외하고 무인 수중글라이더에 대해 진행된 연구는 거의 전무하다고 할 수 있다(Seo et al., 2008).
Graver 등은 내부 이동질량의 운동을 포함한 수중글라이더의 동역학 모델링에 대한 연구를 수행하였으며, Bhatta 등은 수직 평면에서 수중글라이더의 정적 거동을 나타내도록 선형화된 모델에 대해 운동에 대한 안정성을 섭동이론을 기반으로 한 비선형적인 접근방법을 통하여 해석하였다(Bhatta and Leonard, 2008; Graver and Leonard, 2001). Zhang 등은 수중글라이더의 또 다른 정적 거동을 나타내는 나선형 운동에 대한 해석을 수행하기 위해서 비선형성이 매우 강한 유체력계수들을 CFD(Computational fluid dynamics) 방법을 통해 결정하였으며 이를 이용하여 운동해석을 수행하였다(Zhang, 2013). 일반적으로 내부 이동질량 및 부력조절장치의 피스톤은 이동하는 속도가 매우 느리기 때문에 수중글라이더는 시간지연이 큰 입력을 갖는 시스템이다. 이에 따라 수중글라이더의 정확한 운동해석을 수행하기 위해서는 입력의 시간지연을 고려하여 모델링을 수행하여야 하며, 이에 대한 운동해석 방법이 필요하다. 따라서 본 연구에서는 무인 수중글라이더의 입력에 해당되는 내부 이동질량 시스템에 대한 전기-기계적 모델링, 부력조절장치에 대한 유압모델링을 추가하여 수중글라이더의 비선형 6자유도 동역학 모델링을 수행하였다. 이를 통해 수중에서의 운동특성을 해석하기 위한 시뮬레이션을 수행하였으며, 결과분석을 통해 설계한 자제제어장치와 부력조절장치의 거동에 따른 전체 수중 글라이더 시스템의 운동관계성을 확인하였다.
2. 시스템 구성 및 동역학 모델링
2.1 시스템 구성
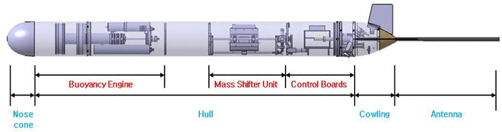
일반적으로 무인 수중글라이더의 형상은 Fig. 1과 같이 수중에서의 거동이 가장 효율적인 어뢰형태로 설계되며, 본 연구에 서도 이와 같은 어뢰 형상의 외형을 갖는 수중글라이더를 모델 로 선정하였다. 수중글라이더를 구성하는 대략적인 구성부에 대해 Fig. 1에 표시하였으며, 구조상 크게 선수부, 선체 및 선미부로 구분할 수 있다. 선수부와 선미부는 항력을 최소화하고 운항에 있어 도움이 되도록 Myring 프로파일을 이용하여 외형 설계를 수행하였다(Myring, 1976). 선수부는 부력조절장치의 피스톤 운동에 따라 해수가 자유롭게 유출 또는 유입될 수 있는 구조를 갖도록 설계함으로써 전체 시스템의 부력을 조절하도록 하였으며, 선미부의 후미에는 통신이 가능하도록 안테나를 장착하여 데이터 송수신이 가능하도록 하였다. 선체의 내부는 부력을 조절할 수 있는 부력조절장치, 내부 배터리의 움직임을 이용한 자세제어장치, 통신 및 여러 제어보드를 탑재할 공간으로 나뉘며 목표 수심의 수압을 견딜 수 있도록 원통형상 구조로 설계하였다.
2.2 좌표계 설정 및 수중운동체 모델링
설계된 무인 수중글라이더에 대하여 선체 내부의 자세제어장치와 부력조절장치의 운동에 따른 전체 시스템의 수중에서의 동적 거동을 파악하고, 특정한 임무를 수행할 수 있도록 설계될 제어기의 성능을 확인하기 위하여 수중글라이더에 대한 수학적 동역학 모델이 필요하다. 수중글라이더에 대한 비선형 6자유도 운동방정식을 유도하기 위해 좌표계를 Fig. 2와 같이 설정하였다.

일반적으로 수중에서 거동하는 운동체의 운동을 묘사하기 위해서는 지구고정좌표계 EXYZ 와 선체고정좌표계 Oxyz 를 설정하여 사용한다. 선체고정좌표계에서 수중글라이더의 진행방향을 x축, 수중글라이더의 우현방향을 y축 그리고 수심방향을 z 축의 양의 방향으로 설정하여 사용하였다. Fig. 2에서 정의된 좌표계에 따라 수중글라이더의 병진운동 및 회전운동에 대한 운동방정식은 뉴턴 제2법칙에 의해 식 (1)과 같이 표현된다 (Fossen, 1994). 일반적으로 우변의 유체력에 포함되는 유체력계수들은 CFD해석, PMM(Planar motion mechanism)시험과 같은 구속모형시험 또는 경험식을 통하여 구한 값들을 사용한다.
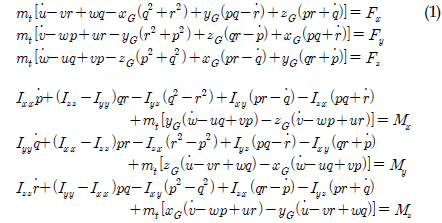
여기서 u,v,ω 와 p, q, r은 각각 x, y, z 축에 대한 수중글라이더의 병진운동 속도와 회전운동 각속도를 나타낸다. Iij 는 각 첨자의 축에 대한 수중글라이더의 질량관성모멘트를 나타내고, xG, yG, zG 는 수중글라이더의 질량중심 위치를 나타낸다. 식 (1)의 우변에 있는 Fz, Fy,Fz,Mz,My,Mz는 각각의 운동방향에 대해 추력, 부력, 중력 그리고 유체력등과 같이 수중글라이더에 작용하는 외력과 모멘트이다. 수중글라이더의 전체 질량 mt는 식 (2)와 같이 표현할 수 있다.

여기서 mh는 수중글라이더의 외형 선체 질량, ms 는 수중글라이더의 외형 선체 질량과 내부의 변화 가능한 질량을 제외한 내부 제어보드 및 센서모듈과 같은 고정된 구성품의 질량, 그리고 mm는 내부의 가변질량을 각각 나타낸다.
2.3 내부 이동질량 모델링
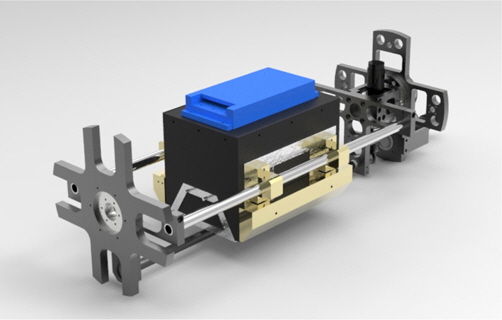
원격제어 무인잠수정 또는 자율 무인잠수정과는 달리 독립적인 추진기를 가지고 있지 않은 수중글라이더는 Fig. 3에 표현된 수중글라이더의 내부에 있는 이동질량체의 직선운동과 회전운동을 이용하여 수중글라이더가 수중에서 피치방향 및 롤방향의 운동을 갖도록 한다. 특히 선체의 피치방향 운동이 발생함에 따라 수중글라이더 선체 뿐만 아니라 선체에 부착된 날개에는 상대 유속에 의한 양력이 발생하게 되며, 이 힘을 통하여 수중글라이더가 추진력을 가지고 운동하게 된다. 본 연구에서는 내부에 있는 이동질량체를 구동하기 위해 사용한 DC (Direct current) 모터의 전기시스템에 대한 모델링과 기어 및 볼스크류를 통한 이동질량체의 기계시스템 모델링을 수행하였다.
DC 모터에 대한 입력전압과 이에 대한 모터의 출력 회전각도에 대한 동역학적 특성을 나타내는 미분방정식은 식 (3)과 같이 표현할 수 있다.

여기서 J, B 는 내부 이동질량 시스템의 질량관성모멘트와 점성마찰계수를 각각 나타낸다. 아래 첨자 m, l 은 각각 모터 및 감속기어를 포함한 시스템과 부하를 나타내고, 𝜂 는 감속비를 나타낸다. 𝜽m 은 모터의 회전각도, V 는 모터에 인가되는 입력전압을 나타낸다. R 은 DC 모터 시스템의 저항, Kb는 역기전력상수, 그리고 KT 는 모터상수를 각각 나타낸다. 위의 DC 모터 시스템을 통하여 발생한 회전력을 이용하여 내부 이동질량이 볼스크류를 통해 전후로 이동하게 된다. 따라서 최종적으로 모터의 회전각도와 이동질량의 이송속도 사이에는 식 (4)와 같은 관계식이 성립하게 된다.

여기서 xm 는 내부 이동질량의 이동거리, Ls 는 사용된 볼스크류의 리드, ωm 는 모터의 회전각속도를 각각 나타낸다. 본 연구에서는 식 (3)과 (4)에 나타낸 내부 이동질량의 운동에 대한 수학적 모델을 수중글라이더의 비선형 동역학 모델에 적용하여 전체 시스템의 운동해석을 수행하도록 하였다.
2.4 부력조절장치 모델링
수직방향으로 추진력을 가할 수 있는 독립적인 추진체를 가지고 있지 않은 수중운동체가 수직방향으로의 운동이 가능하려면, 수중운동체에 작용하는 중력 또는 부력을 조절할 수 있어야 한다. 따라서 본 연구에서 사용된 수중글라이더는 선체의 내부에 Fig. 4와 같은 형태의 부력조절장치를 설계하여 수중글라이더에 작용하는 부력을 조절할 수 있도록 하였다. 이는 유압을 이용하여 부력조절장치의 피스톤을 전진시키도록 하였고, 피스톤을 후진시킬 경우에는 소비전력을 줄이기 위하여 해수의 압력을 이용하도록 설계하였다. 피스톤의 운동에 따라 수중에서 수중글라이더의 부피를 변화시킴으로써, 시스템에 작용하는 부력을 조절할 수 있게 되며 결과적으로 수직방향의 운동이 가능하도록 하였다.

부력조절장치의 구조는 DC 모터를 이용하여 유압펌프를 작동시키며, 펌프에 의해 토출되는 유체의 압력을 이용하여 피스톤을 전진시키도록 한다. 부력엔진에 사용된 펌프는 정용량 펌프로서, 각도가 고정된 사판의 회전에 의해 펌프 내부에 있는다수 피스톤의 전진과 후진운동이 발생하고 이로 인해 압력이 발생하는 펌프이다. 정용량 펌프에 의한 유량모델링은 식 (5)와 같이 나타낼 수 있다.

여기서 q는 단위시간당 펌프에서 토출되는 유량, D 는 펌프의 회전수당 토출량, ωp는 펌프에 연결된 모터의 회전각속도를 각 각 나타낸다. Kleak는 누출계수(Leakage coefficient), ΔP는 펌 프의 유입구와 유출구 사이의 압력차를 나타낸다. 누출계수는 다음과 같은 식 (6)에 의해 표현되고, 누출유량은 펌프의 유입 구와 유출구 사이의 압력차에 선형적으로 비례한다고 가정하면, 하겐-포아젤(Hagen-Poiseuille) 방정식을 통하여 식 (7)과 같이 나타낼 수 있다.


여기서 μ, 𝛾, p는 각각 점성계수, 동점성계수, 유체밀도를 나타내고, KHP 는 하겐-포아젤계수, qleak는 누출유량을 나타낸다. 또한 공칭압력 및 공칭점성계수에서 수행한 실험을 통하여 누출유량을 다음과 같이 식 (8)로 표현할 수 있다.

여기서 ωnom 는 모터의 공칭각속도를 나타내고, 𝜂v는 펌프의 용 적 효율(Volumetric efficiency)을 나타낸다. 위의 식들을 정리하면 최종적으로 모터의 회전운동에 의해 펌프에서 토출되는 유량은 식 (9)와 같이 나타낼 수 있다.

식 (9)에서 나타낸 펌프의 유량에 의해서 부력조절장치의 피스톤이 움직이게 되며, 피스톤의 이동속도와 유량사이의 관계는 식 (10)과 같이 표현할 수 있다.

여기서 A 는 부력조절장치 피스톤의 단면적을 나타낸다. 이 결과는 추후 피스톤의 운동에 의해 실시간으로 변하는 부력중심 및 부력을 구하는데 사용하게 된다. 반면에 피스톤을 후진시킴으로써 전체 시스템에 작용하는 부력을 줄이기 위해서는 어떠한 동력을 사용하지 않고 해수의 압력을 통하여 자연적으로 피스톤이 후진하도록 하였다. 본 연구에서 사용된 부력엔진 피스톤의 후진운동에 대한 운동모델링은 실제 제작된 부력엔진에 대하여 일정 압력 하에서 피스톤이 후진하는 속도를 측정하는 실험을 수행하였으며, 이 데이터들을 곡선으로 근사화하여 수심에 따른 피스톤의 운동속도를 모델링하였다.
2.5 수중글라이더 모델링을 위한 변수 결정법
내부 이동질량의 운동과 부력조절장치 피스톤의 운동으로 인하여 수중글라이더의 질량중심과 질량관성모멘트, 그리고 부력중심과 부력은 실시간으로 변하게 된다. 이동질량 및 피스톤의 운동은 그 속도가 매우 느리기 때문에, 이 두 질량체의 운동이 전체 수중글라이더의 운동에 미치는 동역학적인 영향은 무시할 수 있다.
따라서 본 연구에서는 수중글라이더의 운동과 내부 이동질량 및 피스톤 운동사이의 동역학적 연성은 제외하고 각각 독립적인 운동으로 고려하였으며, 단지 기구학적 영향만을 포함하여 전체 시스템에 대한 동역학 모델링을 수행하였다. 먼저 내부 이동질량에 대한 기구학적 특성을 고려하기 위하여 Fig. 5에서 표현한 것과 같이 선체고정좌표계 원점에서부터 이동질량의 질량 중심까지 위치벡터를 질량의 이송 및 회전에 따라 식 (11)과 같이 구할 수 있다.


여기서 xm, 𝜙m 는 각각 내부 이동질량이 선체고정좌표계의 원점으로부터의 이동한 거리 및 회전 각도를 나타낸다. 따라서 내부 이동질량의 운동에 따른 선체고정좌표계의 원점으로부터 수중글라이더의 전체질량중심까지의 위치벡터는 식 (12)와 같이 표현할 수 있다.

여기서 rh, rs, rm(t)은 선체고정좌표계의 원점으로부터 선체의 질량중심, 고정질량의 질량중심, 내부 이동질량의 질량중심까지의 위치벡터를 각각 나타낸다. 또한 수중글라이더의 전체 질량관성모멘트는 식 (13)과 같이 구할 수 있다.

여기서 Ih, Is, Im는 각각의 질량중심에서 표현한 선체의 질량 관성모멘트, 고정질량의 질량관성모멘트, 내부 이동질량의 질량 관성모멘트를 나타낸다. 연산자 ^는 벡터의 외적을 표현하기 위해 벡터를 왜대칭행렬로 나타내는 연산자이다(Graver and Leonard, 2001).
부력조절장치에 의한 피스톤의 운동은 수중글라이더의 부피를 변화시킨다. 이러한 부피의 변화는 결국 수중글라이더의 부력 및 부력중심을 실시간으로 변하도록 하므로, 식 (14)를 통하여 부력조절장치 피스톤의 운동에 따른 선체고정좌표계의 원점으로부터 수중글라이더의 부력중심까지의 위치벡터 및 수중글라이더에 작용하는 부력을 구할 수 있다.

여기서 Vfix 는 선체고정좌표계의 y-z 평면을 기준으로 선미부 쪽의 수중글라이더가 물에 잠기는 부분의 고정된 부피를 나타내고, Vvar (t)는 피스톤의 운동에 따라 실시간으로 변하는 선수부쪽의 수중글라이더가 물에 잠기는 부분의 부피를 각각 나타낸다. 그리고 Vt(t) 는 수중글라이더가 물에 잠기는 전체부피를 나타낸다. rvar (t) 는 선체고정좌표계 원점으로부터 앞쪽부분 Vvar (t) 의 체적중심까지의 위치벡터로서 실시간으로 변하는 부력조절장치 피스톤의 위치를 통하여 구할 수 있다. 그리고 rfix는 수중글라이더의 뒤쪽부분 Vfix 의 체적중심까지의 위치벡터를 각각 나타낸다. p는 해수의 밀도, g는 중력가속도를 나타낸다. 또한 B(t) 는 배수량에 따라 수중글라이더에 작용하는 부력을 나타낸다.
식 (11) ~ (14)에서 표현된 실시간으로 변하는 질량중심, 질량 관성모멘트, 부력중심, 그리고 부력 등이 식 (1)에 표현된 비선형 6자유도 운동방정식에 적용된다면 내부 이동질량 및 부력조절장치를 통해 수중에서 거동하는 수중글라이더의 운동을 묘사 할 수 있다.
3. 시뮬레이션 및 해석
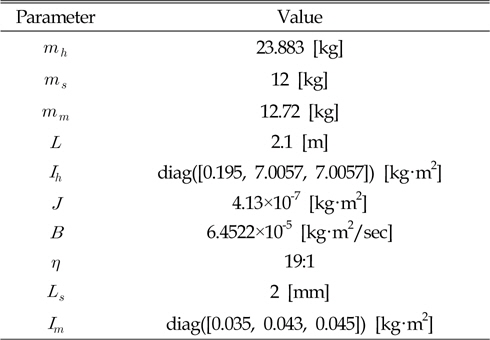
앞서 유도한 비선형 6자유도 운동방정식의 유효성을 검증하기 위하여 Matlab / Simulink를 이용한 동역학 시뮬레이터를 개발하였고, 내부 이동질량과 부력조절장치 피스톤의 운동에 따른 수중글라이더의 운동특성을 파악하기 위한 시뮬레이션을 수행하였다. 본 연구에서는 동일한 형상을 갖는 모형을 제작하여 이를 HPMM(Horizontal planar motion mechanism), VPMM(Vertical planar motion mechanism) 시험을 수행하여 얻어진 유체력계수를 시뮬레이션에 사용하였으며(Jung et al, 2014), 시험을 통하여 얻어진 부가질량 및 부가 관성모멘트와 선형 감쇠력 및 감쇠모멘트 계수들 이외의 비선형 감쇠를 나타내는 유체력계수들은 설계된 수중글라이더의 선체형상에 대하여 경험식을 이용하여 구하였다(Prestero, 2001). 또한 수중글라이더의 수직면에서의 운동과 수평면에서의 운동의 연성관계를 나타내는 유체력계수들은 선체의 대칭성으로 인하여 그 영향이 무시할 만큼 작다고 가정하였으며, 시뮬레이션에 사용된 글라이더 시스템에 대한 주요 파라미터들은 Table 1에 나타내었다.
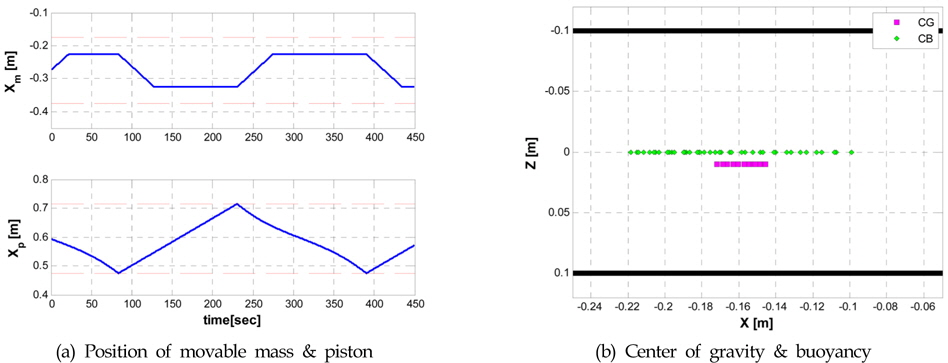
먼저 수직방향의 운동특성을 알아보기 위하여 내부 이동질량의 회전운동을 제외한 전후운동과 부력조절장치의 피스톤 운동을 고려하여 수직평면상에서의 움직임을 확인하였다. 수중글라이더가 전진하면서 하강하기 위해서는 자세제어장치의 이동질량이 전진함과 동시에 부력을 감소시키기 위하여 부력조절장치의 피스톤이 후진해야 하며, 반대로 수중글라이더가 상승하기 위해서는 이동질량이 후진함과 동시에 부력조절장치의 피스톤은 전진함으로써 부력이 증가하도록 해야 한다.
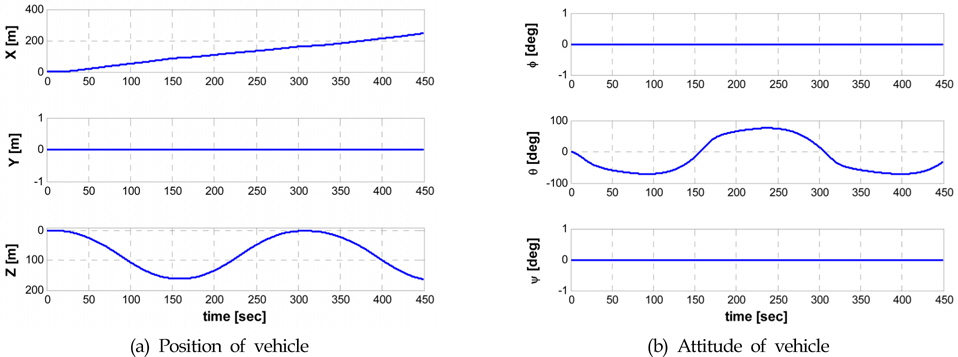
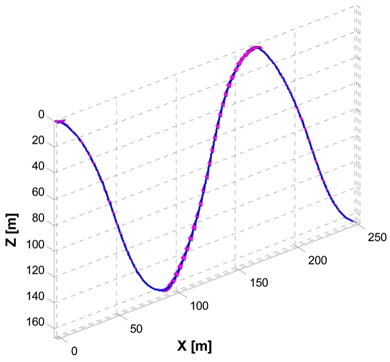
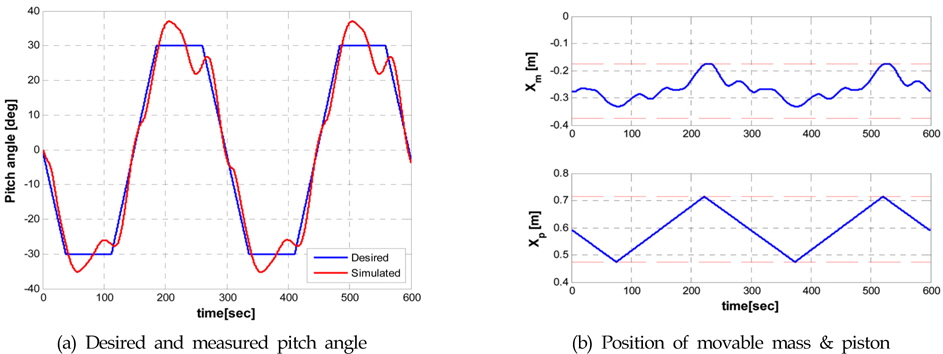
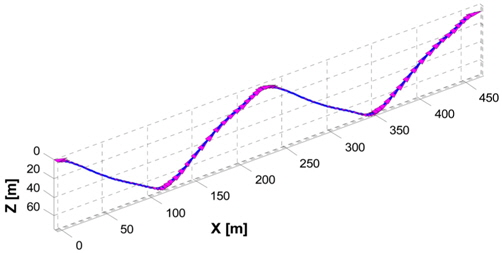
따라서 Fig. 6(a)에 보이는 것과 같은 주기를 갖는 두 제어장치의 운동을 통하여 수중글라이더는 상승 또는 하강을 할 수 있는 피치방향의 운동과 수직방향의 운동이 동시에 발생하게 된다. 또한 Fig. 6(b)에서는 두 입력의 변화에 따라 전체 수중글라이더 시스템의 부력중심과 질량중심이 실시간으로 변화함을 나타내고 있다. 이에 따라 Fig. 7에서 보는 바와 같이 수중글라이더가 초기에는 수평을 유지하면서 정지 상태에 있다가 두 제어장치의 입력에 의하여 전진 및 수직방향으로의 운동을 수행하게 되며, 수직면과 수평면의 연성관계를 나타내는 유체력계수들의 영향이 없기 때문에 수평면에서의 운동은 발생하지 않는다. Fig. 8은 수중에서 거동하는 수중글라이더의 궤적을 보이고 있다. 하지만 위와 같은 시뮬레이션 결과에서는 피치각도가 –70°에서 70°까지 매우 큰 값을 갖으면서 잠항하거나 부상하게 된다. 이와 같은 수중글라이더의 동적 거동은 조류와 같은 외란이 발생할 경우 수중글라이더의 안정성에 매우 큰 영향을 미칠 수 있다. 따라서 수중글라이더가 수중에서 안정적인 거동을 수행하기 위해서는 일정한 피치각도를 유지하는 것이 필요하다. 또한 불연속적인 피치각도의 변화도 마찬가지로 수중글라이더의 안정성에 영향을 줄 수 있기 때문에 본 연구에서는 Fig. 9(a)와 같이 목표 피치각도가 연속성을 가질 수 있게 설정하였으며, PID(Proportional integral derivative) 제어기를 설계하여 주어진 목표 피치각도를 추종할 수 있도록 내부 이동질량을 제어하였다. Fig. 9(a)에 수중글라이더가 초기에 부력조절장치의 피스톤이 중립위치에서 시작하여 최대로 후진할 수 있는 거리의 절반까지는 0°에서 –30°까지 선형적으로 변하도록 하였고, 이후 피스톤이 최대로 후진한 후 다시 그 위치로 돌아올 때까지는 –30°의 피치각도를 유지하도록 설정하였다. 피스톤이 중립위치를 지나 최대로 전진할 수 있는 거리의 절반까지는 –30°에서 30°까지 선형적으로 변하도록 하였고, 최대로 전진한 후 다시 그 위치로 돌아올 때까지는 30°의 피치각도를 유지하도록 설정하였다. Fig. 9(a)의 결과에서 보는 바와 같이 수중글라이더의 측정된 피치각도가 목표 피치각도를 추종하고 있음을 볼 수 있다. 현재 설계된 PID제어 알고리즘을 통해서는 설정한 목표 피치각도에 대해 어느 정도의 오차를 가지면서 추종하고 있지만, 이는 시간지연이 매우 큰 입력시스템에 대한 제어알고리즘을 추가적으로 고려하여 설계한다면 더 정밀한 제어를 수행할 수 있을 것이라 생각된다. Fig. 9(b)는 PID제어 알고리즘에 의해 제어된 내부 이동질량의 위치와 반복적으로 운동하는 부력조절장치 피스톤의 위치를 나타낸다. 그리고 Fig. 10은 위의 입력에 따른 수중글라이더의 수중에서의 궤적을 나타낸다.
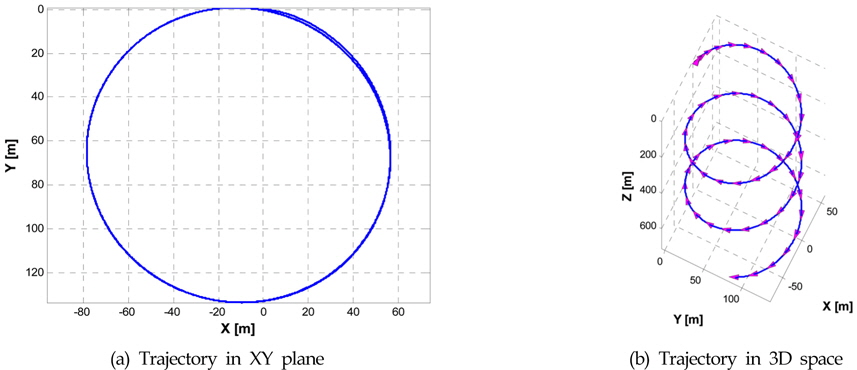
한편 내부 이동질량의 회전운동을 통하여 수중글라이더의 나선형 운동에 대한 거동을 살펴볼 수 있다. Fig. 11은 수중글라이더가 잠항할 경우에 대해서 내부 이동질량의 목표 피치각도를 위의 수직방향운동과 같은 방법으로 제어하도록 하였으며, 롤방향과 요방향의 회전운동을 수행할 수 있도록 내부 이동질량을 30°를 회전하였을 경우에 대한 시뮬레이션 결과이다. 이 경우 수중글라이더는 약 65m 정도의 선회반경을 갖고 나선형의 운 을 하면서 잠항하는 결과를 나타낸다.
이상과 같이 수중글라이더의 동역학 모델링의 유효성 검증을 위하여 다양한 동적 거동 시뮬레이션을 수행하였으며, 이에 대해 추후 실제 제작한 수중글라이더의 실험을 통해 그 타당성을 추가적으로 검증할 예정이다.
4. 결 론
본 연구에서는 내부 이동질량과 부력조절장치의 운동모델을 고려한 무인 수중글라이더의 동역학 모델링을 수행하였으며, 이를 바탕으로 수중글라이더의 동적거동 시뮬레이션을 수행하였다. 시뮬레이션을 통해 수중글라이더의 내부 이동질량의 위치 변화와 부력조절장치 피스톤의 운동을 통하여 상승, 하강운동의 운동특성을 확인할 수 있었다. 추후 현재 제작중인 무인 수중글라이더를 이용하여 수조 실험 및 실해역 실험을 통한 동역학 특성을 검증할 예정이다. 또한 에너지 소비를 최소화하기 위한 알고리즘 개발과 효율적으로 넓은 지역을 탐사할 수 있는 궤적 생성 및 시간지연이 큰 시스템에 대한 제어알고리즘에 대한 다양한 연구와 실험을 수행할 계획이다.




